1.本实用新型属于安全防护技术领域,涉及一种清污机器人的防碰撞装置。
背景技术:
2.在水电站的坝顶,为了吊装运输,通常设有多台有轨门机。但是多台门机在同一个有限的作业空间内运行,碰撞风险极大。现有技术中常通过专业的工作人员进行现场协调,防止发生碰撞事故,其存在以下不足:
3.(1)现有技术中通过人员现场协调控制现场的碰撞事故,但是在水电站汛期清污或岁修期时,现场门机使用频繁,人员众多,突发情况时有发生,仅通过现场人员协调,很容易反应不及时,引发安全事故。
4.(2)现场需要众多的协调人员,存在一定的安全风险。
5.(3)智能化程度低,耗财费力,导致办事效率低。
6.采用清污机器人进行清污时,同样通过门机轨道行走清污,因此为了保证清污机器人运行安全,及时高效,安全有序的清理拦污栅前污物,保证水电站机组和拦污栅运行安全,需提供一种清污机器人的防碰撞装置。
技术实现要素:
7.本实用新型所要解决的技术问题是提供一种清污机器人的防碰撞装置,结构简单,采用在行走大车前进方向的框架上设置激光防撞车传感器和扇扫防撞人传感器。激光防撞车传感器位于扇扫防撞人传感器的上部,摄像头位于激光防撞车传感器上部,行走大车的滚轮沿轨道滚动时,摄像头对现场进行摄像,激光防撞车传感器和扇扫防撞人传感器实时监测前进方向是否有障碍物,当前方有有障碍物时,行走大车自动停止,有效避免在行走过程中与障碍物和行人发生撞击,安全性能好,操作简单方便。
8.为解决上述技术问题,本实用新型所采用的技术方案是:一种清污机器人的防碰撞装置,它包行走大车、激光防撞车传感器、扇扫防撞人传感器和摄像头;所述激光防撞车传感器和扇扫防撞人传感器皆设置与行走大车前进方向的框架上,激光防撞车传感器位于扇扫防撞人传感器的上部,摄像头位于激光防撞车传感器上部,行走大车的滚轮沿轨道滚动时,摄像头对现场进行摄像,激光防撞车传感器和扇扫防撞人传感器实时监测前进方向是否有障碍物。
9.所述扇扫防撞人传感器内设置多个呈扇形布设的传感器探头。
10.所述激光防撞车传感器探测前进方向轨道上是否有障碍物,当前方有有障碍物时,行走大车自动停止。
11.所述扇扫防撞人传感器用于探测前进方向是否有行人,行走大车自动停止。
12.所述摄像头将现场场景传输给后台控制系统。
13.一种清污机器人的防碰撞装置,通过行走大车前进方向的框架上设置激光防撞车传感器和扇扫防撞人传感器。激光防撞车传感器位于扇扫防撞人传感器的上部,摄像头位
于激光防撞车传感器上部,行走大车的滚轮沿轨道滚动时,摄像头对现场进行摄像,激光防撞车传感器和扇扫防撞人传感器实时监测前进方向是否有障碍物,当前方有有障碍物时,行走大车自动停止。本实用新型克服了原清污机器人行走大车存在与前方障碍物和行人发生碰撞,存在安全隐患的问题,具有结构简单,有效避免在行走过程中与障碍物和行人发生撞击,安全性能好,操作简单方便的特点。
附图说明
14.下面结合附图和实施例对本实用新型作进一步说明。
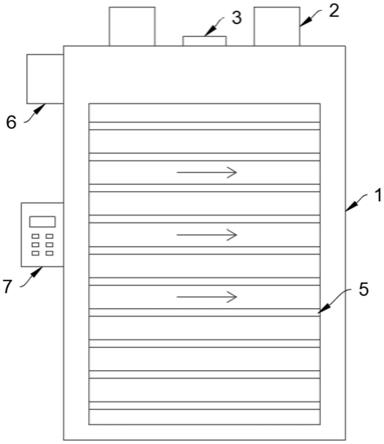
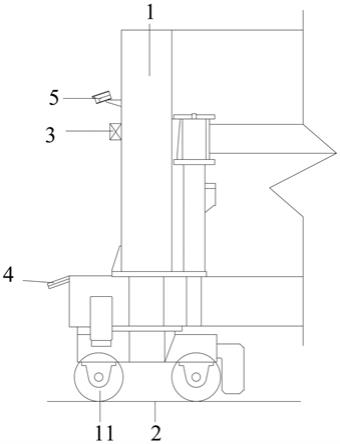
15.图1为本实用新型的结构示意图。
16.图2为本实用新型传感器探头布设示意图。
17.图中:行走大车1,滚轮11,轨道2,激光防撞车传感器3,扇扫防撞人传感器4,摄像头5,传感器探头6。
具体实施方式
18.如图1~图2中,一种清污机器人的防碰撞装置,它包行走大车1、激光防撞车传感器3、扇扫防撞人传感器4和摄像头5;所述激光防撞车传感器3和扇扫防撞人传感器4皆设置与行走大车1前进方向的框架上,激光防撞车传感器3位于扇扫防撞人传感器4的上部,摄像头5位于激光防撞车传感器3上部,行走大车1的滚轮11沿轨道2滚动时,摄像头5对现场进行摄像,激光防撞车传感器3和扇扫防撞人传感器4实时监测前进方向是否有障碍物。有效避免在行走过程中与障碍物和行人发生撞击,安全性能好,操作简单方便。
19.优选地,激光防撞车传感器3的布置高度优选为2m,扇扫防撞人传感器4的高度优选为1.5m。
20.优选的方案中,所述扇扫防撞人传感器4内设置多个呈扇形布设的传感器探头6。使用时,位于扇扫防撞人传感器4内的多个传感器探头6,呈扇形布设,扩大了扫描范围,侧向对快速移动目标进行扫描,进一步提高安全性。
21.优选的方案中,所述激光防撞车传感器3探测前进方向轨道2上是否有障碍物,当前方有有障碍物时,行走大车1自动停止。使用时,激光防撞车传感器3沿轨道2前进的方向主要移动设备为门机,当激光防撞车传感器3感应前方有门机时,行走大车1停止。
22.优选地,当激光防撞车传感器3感应到门机移动且快速接近时,行走大车1停止,激光防撞车传感器3将感应的信号及时传输给后台控制系统,通过后台控制系统启动紧急报警。
23.优选的方案中,所述扇扫防撞人传感器4用于探测前进方向是否有行人,行走大车1自动停止。使用时,扇扫防撞人传感器4在感应到行人后,行人位于轨道2前进方向时自动停止,行人位于轨道2两侧时减速行驶。
24.优选的方案中,所述摄像头5将现场场景传输给后台控制系统。使用时,后台控制系统对摄像头5拍摄的场景进行取景,或实时监控,实时掌握清污现场的情况,当发生事故时,可以根据现场情况,快速做出反应,保证清污机器人安全运行。
25.本实用新型的有效效果主要体现在:
26.本实用新型通过激光防撞车传感器、扇扫防撞人传感器以及摄像头联合工作,有
效避免了清污现场可能出现的碰撞事故,并确保了工作人员可以实时掌握清污现场的情况,当发生事故时,可以根据现场情况,快速做出反应,保证清污机器人安全运行。
27.本实用新型采用了扇扫防撞人传感器,有效的扩大了对前进方向探测范围。
28.本实用新型智能化程度高,反映迅速,有效的保证了清污效率。
29.清污现场需要的协调人员很少,清污时安全风险比较低。
30.上述的实施例仅为本实用新型的优选技术方案,而不应视为对于本实用新型的限制,本申请中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本实用新型的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本实用新型的保护范围之内。
技术特征:
1.一种清污机器人的防碰撞装置,其特征是:它包行走大车(1)、激光防撞车传感器(3)、扇扫防撞人传感器(4)和摄像头(5);所述激光防撞车传感器(3)和扇扫防撞人传感器(4)皆设置与行走大车(1)前进方向的框架上,激光防撞车传感器(3)位于扇扫防撞人传感器(4)的上部,摄像头(5)位于激光防撞车传感器(3)上部,行走大车(1)的滚轮(11)沿轨道(2)滚动时,摄像头(5)对现场进行摄像,激光防撞车传感器(3)和扇扫防撞人传感器(4)实时监测前进方向是否有障碍物。2.根据权利要求1所述的清污机器人的防碰撞装置,其特征是:所述扇扫防撞人传感器(4)内设置多个呈扇形布设的传感器探头(6)。3.根据权利要求1所述的清污机器人的防碰撞装置,其特征是:所述激光防撞车传感器(3)探测前进方向轨道(2)上是否有障碍物,当前方有有障碍物时,行走大车(1)自动停止。4.根据权利要求1所述的清污机器人的防碰撞装置,其特征是:所述扇扫防撞人传感器(4)用于探测前进方向是否有行人,行走大车(1)自动停止。5.根据权利要求1所述的清污机器人的防碰撞装置,其特征是:所述摄像头(5)将现场场景传输给后台控制系统。
技术总结
一种清污机器人的防碰撞装置,通过行走大车前进方向的框架上设置激光防撞车传感器和扇扫防撞人传感器。激光防撞车传感器位于扇扫防撞人传感器的上部,摄像头位于激光防撞车传感器上部,行走大车的滚轮沿轨道滚动时,摄像头对现场进行摄像,激光防撞车传感器和扇扫防撞人传感器实时监测前进方向是否有障碍物,当前方有有障碍物时,行走大车自动停止。本实用新型克服了原清污机器人行走大车存在与前方障碍物和行人发生碰撞,存在安全隐患的问题,具有结构简单,有效避免在行走过程中与障碍物和行人发生撞击,安全性能好,操作简单方便的特点。特点。特点。
技术研发人员:曾辉 刘绍新 陈钢 魏晓翔 雷海威 唐德锋 俸靖 张海龙 文宇 刘稳 刘博智 都旭煌 胡云球 郑南轩
受保护的技术使用者:中国长江电力股份有限公司
技术研发日:2021.03.24
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。