1.本实用新型涉及清扫机器人制造技术领域,特别涉及一种自动导航光伏清扫机器人。
背景技术:
2.我国太阳能光伏电站大多位于环境相对恶劣,由于风沙、风雪等在光伏组件表面的沉积导致光伏电站光电转化效率偏低。随着光伏发电应用规模不断扩大,急需能对太阳能电池板表面沙灰、积雪等异物进行定期清扫的智能清扫机器人。目前的清洁方式有人工干洗、人工水洗、工程车清洁和机器人清扫等方式,其中现有清扫机器人均为依附于光伏组件表面的独立清扫装置,光伏板阵间无法转移,建设及运维成本较高,环境适应能力差。因此设计一款适应复杂环境的新型自行走清扫机器人是十分必要的。
技术实现要素:
3.本实用新型的主要目的在于提供一种自动导航光伏清扫机器人,底盘高度可自动保持水平、轮履可互换,并且具有较高的效率和地形适应性,以及清扫路径自动卫星导航功能,进而能够对光伏板进行自动化清扫作业,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种自动导航光伏清扫机器人,包括清扫装置总成、底盘结构总成、液压系统、动力系统、控制系统、导航系统以及臂架总成,所述臂架总成固定安装于所述底盘结构总成前端顶部,且臂架总成顶端固定安装有清扫装置总成,所述液压系统、动力系统、控制系统和导航系统皆固定安装于所述底盘结构总成顶部;
6.所述清扫装置总成包括支撑架、清扫滚筒、清扫马达、行走驱动马达和吸尘罩;
7.所述导航系统包括卫星接收机、移动基站和天线,所述卫星接收机、移动基站和天线之间电连接;
8.所述液压系统包括电动液压泵、电液比例控制阀和液压油箱;
9.所述控制系统包括控制箱、操作控制器和位姿检测装置,所述操作控制器和位姿检测装置皆固定安装于所述控制箱内,所述清扫装置总成、底盘结构总成、液压系统、导航系统、动力系统和位姿检测装置皆与操作控制器电连接;
10.所述动力系统包括电池和吸尘风机,所述吸尘风机固定安装于所述底盘结构总成顶部尾端,且电池固定安装于所述底盘结构总成底部。
11.优选的,所述支撑架顶部与所述臂架总成前端固定连接,所述支撑架内中间位置通过轴套安装有清扫滚筒,所述支撑架内两侧皆通过轴套安装有转杆,且转杆两端皆套装有滚轮,所述支撑架一侧中心位置还固定安装有吸尘罩,且吸尘风机的吸尘端通过吸尘管道连接吸尘罩。
12.优选的,所述清扫滚筒一端连接有驱动其转动的清扫马达,且清扫马达通过螺栓固定安装于所述支撑架的一端,其中一个所述转杆一端还连接有驱动其转动的行走驱动马
达,且行走驱动马达通过螺栓固定安装于所述支撑架另一端。
13.优选的,所述电动液压泵的进油端通过管道连接液压油箱,且电动液压泵的出油端通过管道连接电液比例控制阀的进油端,所述清扫装置总成、底盘结构总成和臂架总成的执行端分别通过管道与电液比例控制阀的出油端相连接。
14.优选的,所述导航系统、吸尘风机和电动液压泵的输入端皆与电池的输出端电连接。
15.优选的,所述底盘结构总成前端具有前轮。
16.优选的,所述前轮为车轮和履带轮。
17.与现有技术相比,本实用新型具有如下有益效果:
18.本实用新型自动导航光伏清扫机器人,具有清扫路径自动卫星导航功能、并且底盘姿态可调、轮履互换、转向性能好、清扫装置行走与大车行走同步、稳定性能良好等优点,可适应地势高低不平等复杂工况下大车底盘自动保持水平,工作稳定性高。同时在狭小地方可以顺利转弯,灵活性好。
附图说明
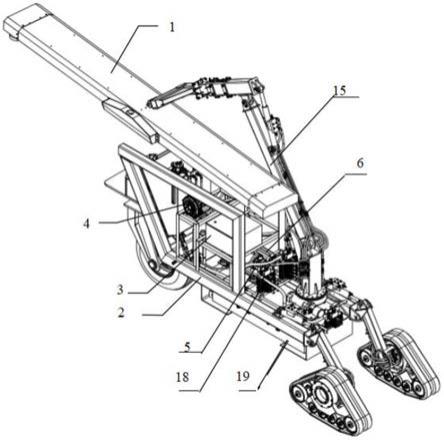
19.图1为本实用新型的整体示意图。
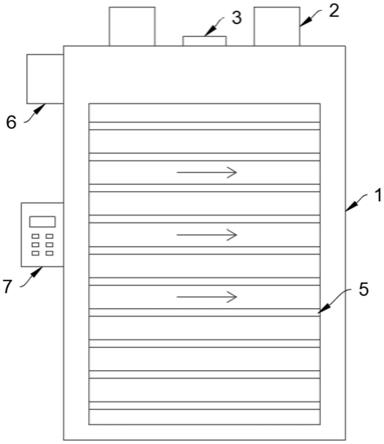
20.图2为本实用新型的俯视结构示意图。
21.图3为本实用新型的底盘结构总成结构示意图。
22.图4为本实用新型的轮胎、履带可互换示意图。
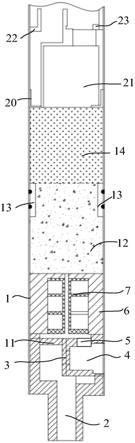
23.图5为本实用新型的清扫装置总成结构示意图。
24.图中:1、清扫装置总成;2、底盘结构总成;3、控制箱;4、吸尘风机;5、卫星接收机;6、移动基站;7、液压油箱;8、电动液压泵; 9、前轮;10、清扫马达;11、吸尘罩;12、清扫滚筒;13、支撑架; 14、行走驱动马达;15、臂架总成;16、转杆;17、滚轮;18、电液比例控制阀;19、电池。
具体实施方式
25.以下结合附图对本实用新型作进一步详细说明,其中相同的零部件用相同的附图标记表示,需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”、“底面”和“顶面”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.请参阅图1
‑
图5所示,一种自动导航光伏清扫机器人,包括清扫装置总成1、底盘结构总成2、液压系统、动力系统、控制系统、导航系统以及臂架总成15,所述臂架总成15固定安装于所述底盘结构总成2前端顶部,且臂架总成15顶端固定安装有清扫装置总成1,所述液压系统、动力系统、控制系统和导航系统皆固定安装于所述底盘结构总成2顶部;
28.所述清扫装置总成1包括支撑架13、清扫滚筒12、清扫马达 10、行走驱动马达14和
吸尘罩11;
29.所述导航系统包括卫星接收机5、移动基站6和天线,所述卫星接收机5、移动基站6和天线之间电连接;
30.所述液压系统包括电动液压泵8、电液比例控制阀18和液压油箱7;
31.所述控制系统包括控制箱3、操作控制器和位姿检测装置,所述操作控制器和位姿检测装置皆固定安装于所述控制箱3内,所述清扫装置总成1、底盘结构总成2、液压系统、导航系统、动力系统和位姿检测装置皆与操作控制器电连接;
32.所述动力系统包括电池19和吸尘风机4,所述吸尘风机4固定安装于所述底盘结构总成顶部尾端,且电池19固定安装于所述底盘结构总成2底部。
33.请参阅图1和图5所示,为了便于臂架总成15控制清扫装置总成1对光伏板灵活而又全范围的进行清扫和吸尘作业,支撑架13 顶部与所述臂架总成15前端固定连接,所述支撑架13内中间位置通过轴套安装有清扫滚筒12,所述支撑架13内两侧皆通过轴套安装有转杆16,且转杆16两端皆套装有滚轮17,所述支撑架13一侧中心位置还固定安装有吸尘罩11,且吸尘风机4的吸尘端通过吸尘管道连接吸尘罩11。
34.请参阅图图1和图5所示,为了便于驱动清扫滚筒12进行转动,以对光伏板进行清扫作业,清扫滚筒12一端连接有驱动其转动的清扫马达10,且清扫马达10通过螺栓固定安装于所述支撑架 13的一端;为了便于驱动支撑架13进行移动,以对较大范围光伏板进行清扫作业,其中一个所述转杆16一端还连接有驱动其转动的行走驱动马达14,且行走驱动马达14通过螺栓固定安装于所述支撑架13另一端。
35.请参阅图1和图2所示,为了便于电动液压泵8将液压动力输送至清扫装置总成1、底盘结构总成2和臂架总成15,以驱动三大总成部分进行相应工作,电动液压泵8的进油端通过管道连接液压油箱7,且电动液压泵8的出油端通过管道连接电液比例控制阀18 的进油端,所述清扫装置总成1、底盘结构总成2和臂架总成15 的执行端分别通过管道与电液比例控制阀18的出油端相连接。
36.请参阅图1所示,为了便于对导航系统、吸尘风机4和电动液压泵8的执行端提供足够电力,导航系统、吸尘风机4和电动液压泵8的输入端皆与电池19的输出端电连接。
37.请参阅图1
‑
图4所示,为了便于保障底盘结构总成2能够进行移动,底盘结构总成2前端具有前轮9。
38.请参阅图4所示,为了便于适应不同路况,前轮9为车轮和履带轮。
39.需要说明的是,本实用新型为一种自动导航光伏清扫机器人,工作时,启动电动液压泵8工作,电动液压泵8将输出动力分为三部分,一部分将动力传递给清扫装置总成1,并利用电液比例控制阀18控制清扫装置总成1的转杆16和滚轮17转动,以驱动清扫装置总成1位置的移动以及其内清扫滚筒12的转动,进而对光伏板进行清扫。第二部分将动力传递臂架总成15,利用电液比例控制阀18控制臂架总成15立柱的旋转、大臂和小臂的伸展、折叠,以调整清扫装置总成1的姿态,进而灵活的完成对光伏板的清扫作业。第三部分将动力传递给底盘结构总成2,通过静液压驱动光伏清扫机器人的行走、转向,利用调平油缸调整前部支撑的高度以保持清扫机器人底盘的水平姿态;在清扫过程中,由卫星接收机5、移动基站6和天线组合而成的导航系统,还可以对清扫机器人的清扫路径进行自动卫星导航,以方便清扫机器人对光伏板进行自动化清扫作业。
40.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。