:
1.本发明涉及糊树脂生产技术领域,具体地说涉及一种清釜喷管全自动辅助调整装置。
背景技术:
2.聚合釜是糊树脂生产系统的关键设备,在聚合完成后,需要利用高压水冲洗聚合釜内壁,以防止胶乳挂在聚合釜内壁而出现粘釜现象,避免聚合釜的传热能力和生产能力下降。目前的清釜设备主要包括高压软管和喷管,清釜时,将喷管固定在聚合釜人孔内部,使喷管底端的喷头置于聚合釜内,通过高压软管向喷管内送入高压水,清釜过程中,人工摆动喷管,完成清釜。但是,由于水流压力大,人工不易控制喷管的方向,操作困难,并且喷管高度固定,不易调整,存在清釜不彻底的现象,清釜质量差。
技术实现要素:
3.本发明的目的在于提供一种便于调整喷管高度和角度的清釜喷管全自动辅助调整装置。
4.本发明由如下技术方案实施:一种清釜喷管全自动辅助调整装置,其包括法兰板、法兰板锁紧机构、转动套管、x轴摆动机构、y轴摆动机构,在所述法兰板和聚合釜人孔之间设置有所述法兰板锁紧机构;在所述法兰板的中部设有通孔,所述转动套管的底端通过万向球与所述通孔转动连接,喷管上下滑动设置在所述转动套管的中部,且所述喷管的底端穿过所述通孔置于所述法兰板的下方;在所述转动套管上设置有用于固定所述喷管的锁紧机构,在所述法兰板上设置有驱动所述转动套管沿x轴方向摆动的所述x轴摆动机构,在所述法兰板上设置有驱动所述转动套管沿y轴方向摆动的所述y轴摆动机构;所述法兰板锁紧机构的旋转驱动、所述x轴摆动机构及所述y轴摆动机构的摆动驱动、所述锁紧机构的锁紧驱动均与控制器电连接。
5.进一步的,所述x轴摆动机构和y轴摆动机构的结构相同,所述x轴摆动机构包括摆动螺杆、滑动套、上连杆和下连杆,所述摆动螺杆的底端与所述转动套管的下部外壁转动连接,在所述摆动螺杆的中部螺接有所述滑动套;在所述转动套管的上部和与其相对的所述滑动套的上部之间纵向铰接有所述上连杆,所述下连杆的顶端与所述滑动套的下部纵向铰接,所述下连杆的底端与所述法兰板通过万向节连接;在所述滑动套上固定有驱动所述摆动螺杆转动的摆动驱动。
6.进一步的,在所述摆动螺杆两侧的所述滑动套的外端面至少固定有两根与所述摆动螺杆平行设置的导向杆;在各个所述导向杆之间套设有安装板,在所述安装板上固定有与所述摆动螺杆传动连接的所述摆动驱动。
7.进一步的,所述法兰板锁紧机构包括插销锁、旋转驱动、曲柄和导杆,在所述法兰板和所述聚合釜人孔之间设置有两个所述插销锁,所述插销锁的锁架固定在所述法兰板的顶部,所述插销锁的锁座固定在所述聚合釜人孔的外壁上;在两个所述插销锁之间的所述
法兰板的顶部通过支架固定有输出轴竖直设置的所述旋转驱动,所述旋转驱动的输出轴与所述曲柄的中部固定连接,所述曲柄的两端分别通过两根导杆与两个所述插销锁的锁杆横向铰接。
8.进一步的,所述锁紧机构包括与所述转动套管螺接的锁紧螺杆,所述锁紧螺杆的内端与所述喷管的外壁活动抵接;在所述转动套管上固定有锁紧驱动,所述锁紧驱动的输出轴与所述锁紧螺杆的外端传动连接。
9.进一步的,在所述聚合釜人孔的外壁上固定有定位块,在所述法兰板的外缘固定有与所述定位块左右相对平行设置的固定耳,在所述固定耳上横向螺接有顶端与定位块活动抵接的调距螺栓。
10.进一步的,所述喷管包括外套管、软管和喷头,在所述外套管的底端固定有所述喷头,所述软管的固定在所述外套管的内部,且所述软管的底端与所述喷头的顶端连通;所述喷头的外壁包括上下设置的扩径段和缩径段,在所述扩径段和所述缩径段均设置有与所述喷头内部连通的喷嘴。
11.进一步的,其还包括设置在聚合釜人孔上方的天车,所述天车的钢丝绳与所述转动套管或法兰板固定连接;所述天车的卷筒编码器与所述控制器电连接。
12.进一步的,在所述转动套管上固定有向上设置的激光测距传感器,所述激光测距传感器与所述控制器电连接。
13.本发明的优点:通过设置法兰板锁紧机构、转动套管、锁紧机构、x轴摆动机构和y轴摆动机构,可以精确调整喷管底部喷头在聚合釜内的高度,以及喷管的倾斜角度,便于实现对聚合釜的全面清洗,保证清釜质量。且法兰板锁紧机构、转动套管、锁紧机构、x轴摆动机构和y轴摆动机构的驱动均可通过控制器控制,自动化程度高,装置的拆装及清釜过程均可远程操控,操作方便快捷,效率高。
附图说明:
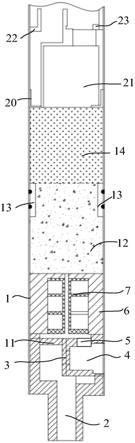
14.图1为实施例1的整体结构示意图。
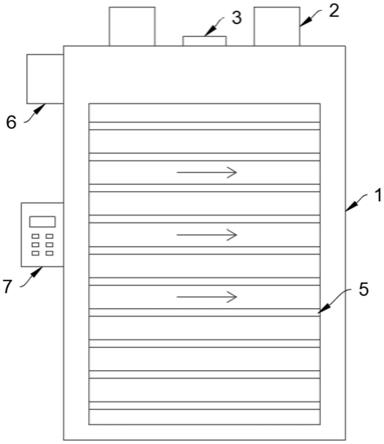
15.图2为实施例1的一种使用状态图。
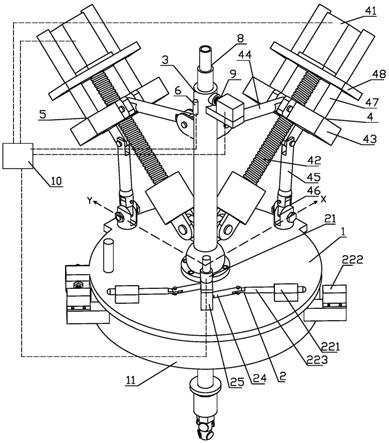
16.图3为实施例1沿y轴的剖面图。
17.图4为实施例2的结构示意图。
18.法兰板1、法兰板锁紧机构2、旋转驱动21、插销锁22、锁架221、锁座222、锁杆223、曲柄23、导杆24、支架25、转动套管3、x轴摆动机构4、摆动驱动41、摆动螺杆42、滑动套43、上连杆44、下连杆45、万向节46、导向杆47、安装板48、y轴摆动机构5、通孔6、万向球7、喷管8、外套管81、软管82、喷头83、扩径段831、缩径段832、喷嘴833、锁紧机构9、锁紧驱动91、锁紧螺杆92、控制器10、聚合釜人孔11、定位块12、固定耳13、调距螺栓14、天车15、钢丝绳151、卷筒编码器152、激光测距传感器16。
具体实施方式:
19.在本发明的描述中,需要说明的是,如出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等,其指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有
特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,如出现术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
20.实施例1:如图1至图3所示,一种清釜喷管全自动辅助调整装置,其包括法兰板1、法兰板锁紧机构2、转动套管3、x轴摆动机构4、y轴摆动机构5,在法兰板1和聚合釜人孔之间设置有法兰板锁紧机构2;法兰板锁紧机构2包括插销锁22、旋转驱动21、曲柄23和导杆24,在法兰板1和聚合釜人孔之间设置有两个插销锁22,插销锁22的锁架221固定在法兰板1的顶部,插销锁22的锁座222固定在聚合釜人孔11的外壁上;在两个插销锁22之间的法兰板1的顶部通过支架25固定有输出轴竖直设置的旋转驱动21,旋转驱动21为电机或旋转气缸,旋转驱动21的输出轴与曲柄23的中部固定连接,曲柄23的两端分别通过两根导杆24与两个插销锁22的锁杆223横向铰接。将法兰板1放置到聚合釜人孔11时,时锁架221和锁座222对准,控制旋转驱动21的输出轴逆时针转动,通过曲柄23和导杆24驱动两个锁杆223插入到对应的锁座222内,进而将法兰板1与聚合釜人孔11固定。清洗结束后,控制旋转驱动21的输出轴顺时针转动,通过曲柄23和导杆24控制锁杆223从锁座222中抽出,即可将法兰板1从聚合釜人孔11上移开。为了便于调整,在聚合釜人孔11的外壁上固定有定位块12,在法兰板1的外缘固定有与定位块12左右相对平行设置的固定耳13,在固定耳13上横向螺接有顶端与定位块12活动抵接的调距螺栓14;将法兰板1及其上方各部件整体移动到聚合釜人孔11上方时,通过旋转调距螺栓14与定位块12抵接,可以对法兰板1和聚合釜人孔11的相对位置进行微调,使得锁架221和锁座222对准;
21.在法兰板1的中部设有通孔6,转动套管3的底端通过万向球7与通孔6转动连接,喷管8上下滑动设置在转动套管3的中部,且喷管8的底端穿过通孔6置于法兰板1的下方;喷管8包括外套管81、软管82和喷头83,在外套管81的底端固定有喷头83,软管82的固定在外套管81的内部,且软管82的底端与喷头83的顶端连通;喷头83的外壁包括上下设置的扩径段831和缩径段832,在扩径段831和缩径段832均设置有与喷头83内部连通的喷嘴833。软管82用于与高压水源连接,且便于用卷扬机进行收放,喷头83设置为中部大两头小的上下锥形侧壁,使得高压水可以从上下两个方向喷出,解决了喷头只能向下单一方向喷涂的问题。
22.在转动套管3上设置有用于固定喷管8的锁紧机构9,锁紧机构9包括与转动套管3螺接的锁紧螺杆92,锁紧螺杆92的内端与喷管8的外壁活动抵接;在转动套管3上固定有锁紧驱动91,锁紧驱动91的输出轴与锁紧螺杆92的外端传动连接;锁紧驱动91为输出轴与锁紧螺杆92同轴固定的电机。锁紧驱动91的输出轴反转时可驱动锁紧螺杆92旋松,便于调整喷管8在转动套管上的位置;锁紧驱动91的输出轴正转时可驱动锁紧螺杆92旋转至与喷管8抵接,将其固定。
23.在法兰板1上设置有驱动转动套管3沿x轴方向摆动的x轴摆动机构4,在法兰板1上设置有驱动转动套管3沿y轴方向摆动的y轴摆动机构5;
24.x轴摆动机构4和y轴摆动机构5的结构相同,x轴摆动机构4包括摆动螺杆42、滑动套43、上连杆44和下连杆45,摆动螺杆42的底端与转动套管3的下部外壁转动连接,具体的,可以在转动套管3外壁固定轴座,摆动螺杆42的底端转动设置在轴座的内部;在摆动螺杆42的中部螺接有滑动套43;在转动套管3的上部和与其相对的滑动套43的上部之间纵向铰接有上连杆44,下连杆45的顶端与滑动套43的下部纵向铰接,下连杆45的底端与法兰板1通过万向节46连接;在摆动螺杆42两侧的滑动套43的外端面至少固定有两根与摆动螺杆42平行
设置的导向杆47;在各个导向杆47之间套设有安装板48,在安装板48上固定有与摆动螺杆42传动连接的摆动驱动41,摆动驱动41为输出轴与摆动螺杆42的顶端同轴固定的电机;在导向杆47的限制下,摆动驱动41的输出轴驱动摆动螺杆42正转或反转时,可驱动滑动套43可沿着摆动螺杆42移动,进而通过上连杆44驱动喷管8摆动。具体的,当x轴摆动机构4的滑动套43沿着摆动螺杆42向上移动时,通过对应的上连杆44将转动套管3及喷管8整体向x轴的正向拉动,此时,y轴摆动机构5整体向x轴的正向摆动;反之,当x轴摆动机构4的滑动套43沿着摆动螺杆42向下移动时,通过对应的上连杆44将转动套管3及喷管8整体向x轴的反方向摆动。喷管8在y轴方向上的摆动通过调整y轴摆动机构5的滑动套43的移动方向即可。旋转驱动21、摆动驱动41、锁紧驱动91均与控制器10电连接;通过控制器10可以控制旋转驱动21、摆动驱动41、锁紧驱动91的旋转方向,实现远程控制。在转动套管3上固定有向上设置的激光测距传感器16,激光测距传感器16与控制器10电连接,用于测量可以将光打到厂房顶部,用于测量距离厂房顶部的距离。
25.实施例2:其整体结构与实施例1相同,不同之处在于,如图4所示,其还包括设置在聚合釜人孔11上方的天车15,天车15的钢丝绳151与转动套管3或法兰板1固定连接;天车15的卷筒编码器152与控制器10电连接。通过卷筒编码器152可以计量钢丝绳151的下降高度,激光测距传感器可以将光打到厂房顶部,卷筒编码器152计量到的信息和激光测距传感器16测得的信息传送给控制器10,利用两者的差值以及喷管的长度进行分析,可以确定法配管在聚合釜内的相对位置。
26.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。