1.本发明涉及风力发电领域,主要涉及一种海上漂浮式风力发电设备平衡的方法及装置。
背景技术:
2.随着现代化社会的不断进步、国民经济的不断发展,由能源危机所带来的问题日益严重。面对能源危机的日益严峻,全世界各国都在大力寻找新的能源来代替传统能源,以风能、太阳能、生物质能、海洋能等为代表的新能源已经成为目前能源发展的重要目标,特别是风力发电和太阳能发电技术已经日趋成熟且在当今的电能使用已经占有重要比例。
3.风力发电设备在海洋上的工作状况不同于陆地,浮体会随着海浪和海风做不规律的摇摆运动,对风力发电设备的发电效率和设备的耐久性造成不良影响,尤其在恶劣海况下,风力发电设备大倾角晃动可能会导致严重后果。例如中国专利文献cn108757338a公开了一种漂浮式风电场平稳与抗台的风机系统,设置固定于海上平台上的圆筒罐以及浮于圆筒罐内的空心倒锥体,使风力发电机组和支撑塔可随着圆筒罐内的水位变化进行升高或降低,有利于在台风等大风来临期间及时降低风力发电机组和支撑塔的位置高度,采用圆筒罐对设备进行保护,避免设备受到破坏,有效抵御台风等大风袭击,圆筒罐内海水基本平稳,能减少设备的摇晃幅度,提高设备运行的平稳性。例如中国专利cn104421107a公开了一种深海悬浮式风力发电机组,包括从上到下依次设置的风机结构、塔架和悬浮平台,所述悬浮平台通过缆索固定在海底;所述风机结构包括横向依次连接的风机叶片、风机轴和风机机舱;所述风机机舱和所述悬浮平台内均设有减振控制装置。本发明的风力发电机组可有效抑制海风载荷和海浪载荷引起的振动,确保深海悬浮风电机组的安全高效生产;如何主动抑制海上漂浮式风力发电设备在恶劣海况下晃动,对人类开发远海风力发电技术具有非常重要的意义。
技术实现要素:
4.本发明的目的是提供一种海上漂浮式风力发电设备动态晃动抑制方法及装置,通过安装于风塔顶端的倾角传感器获取风塔实时倾角数据,对风塔设备的倾斜角度、倾斜运动速度进行分析计算,结合水下的空气喷嘴装置建立喷气反作用力矩控制模型,形成抑制风塔晃动的反向作用力矩,从而实现风塔的大角度晃动抑制,提高漂浮式海上风电的安全可靠性和环境适应能力。
5.为了实现上述目的,本发明提供以下技术方案:
6.本发明提供一种海上漂浮式风力发电设备动态晃动抑制装置,包括空气压缩装置、水下空气喷嘴装置、风能蓄电装置、倾角传感器和控制器,所述空气压缩储气装置设置在风力发电设备的发电机及桨叶附近,所述水下空气喷嘴装置嵌入风力发电设备的压载舱底部,所述倾角传感器和控制器位于所述风力发电设备的机舱内。
7.优选的,在风力发电设备正常工作时,利用风能蓄电装置以及压缩储气装置进行
空气压缩储气,储气装置有多种方式,本文给出具体的两种:第一种是通过齿轮箱转轴带动旋转曲柄,利用旋转曲柄推动气缸活塞进行空气压缩;第二种是利用电能驱动空气压缩机,同时释放过剩电能。
8.进一步地,所述水下空气喷嘴装置至少设有四个,所述水下空气喷嘴装置的高度低于浮体浮心和风力发电设备重心,所述水下空气喷嘴装置的喷嘴与水平面平行,相邻两个所述水下空气喷嘴装置的喷嘴之间的夹角为90度。
9.进一步地,所述喷嘴上设有电磁阀,所述倾角传感器、所述电磁阀和风能蓄电装置电信号连接。
10.进一步地,所述空气压缩装置包括喷气装置,所述喷气装置包括第一喷气设备喷管、第二喷气设备喷管、第三喷气设备喷管和第四喷气设备喷管,所述第一喷气设备喷管、第二喷气设备喷管、第三喷气设备喷管、第四喷气设备喷管分别通过输气管路与储气罐相连;所述第一喷气设备喷管、第二喷气设备喷管、第三喷气设备喷管和第四喷气设备喷管上分别设有第一喷管阀、第二喷管阀、第三喷管阀和第四喷管阀。
11.喷气装置之间工作状态相互独立,以调整发电站的工作姿态,空气喷嘴装置输出功率随发电站倾斜角度增大而增加,直到发电站晃动幅度小于设定阈值,喷气暂停。
12.进一步地,基于上述一种海上漂浮式风力发电设备动态晃动抑制方法,所述方法为:
13.(1)在海况良好、风力发电站正常运行时,利用风能蓄电装置驱动空气压缩装置储气;
14.(2)倾角传感器测量发电机的姿态参数;
15.(3)控制器预先确定所述姿态给定值,控制器从传感器获得姿态参数,并根据姿态参数和姿态给定值确定各个方向所需推力,并且根据所需推力确定各个空气喷嘴装置的出口面积s;
16.(4)结合水下的空气喷嘴装置,由力矩平衡原理建立喷气反作用力矩控制模型,得出环境(海浪、海风等)产生的倾斜力矩m
i
与水线面积惯性矩m
wp
、扶正力矩m
is
、锚泊系统力矩m
mla
、海上风力发电设备平衡系统输出力矩m
mla
四者之和的力矩平衡公式;
17.(5)在风力等级过大或者恶劣海况导致风力发电站倾斜角度超过设定阈值时,通过水下空气喷嘴装置喷出储存空气,输出海上风力发电设备平衡系统输出力矩m
sp
。
18.优选的,空气喷嘴装置的出口面积s的计算公式为:
[0019][0020]
其中,s是出口面积;
[0021]
f
sp
是喷气设备提供推力;
[0022]
δp是储气装置内部压强与喷嘴所处水下压强之间的压强差。
[0023]
优选的,所述控制器通过线性波理论、三维格林函数法、浮式基础运动方程模拟海浪对风电设备的影响,并在计算风力载荷时抵消海浪影响;根据abs规范和我国《风力发电机组设计要求》(jb/t 10300
‑
2001)计算风电设备在正常发电和停止发电时的风载荷;以浮力为支撑点,通过力矩平衡分析计算各喷气设备输出推力,发送指令。
[0024]
优选的,所述传感器可以获取所述风塔设备的姿态参数,所述姿态给定值包括横
摇给定值和纵摇给定值。
[0025]
优选的,姿态给定值可根据经验值或理论进行预先设置。优选地,控制器在试验阶段确定姿态给定值。
[0026]
根据比较所述姿态参数和所述姿态给定值,以浮心为支撑点,通过力矩平衡公式和比例积分微分算法计算各喷气设备输出推力,根据所述输出推力来确定各个喷气设备所述喷口面积;在喷气设备工作阶段,通过比例积分微分算法随时调整各个喷嘴的喷口面积,直至发电设备恢复平衡。
[0027]
比例积分微分算法校正函数为:
[0028][0029]
其中s1为需要调节的量,此处为喷口面积;
[0030]
g
j
(s1)是调节后的量;
[0031]
k
p
、k
i
、k
d
为三个待定参数,需要依靠实际场景采用试探法或者借助实验方法采用齐格勒
‑
尼柯尔斯法确定。
[0032]
进一步地,步骤(2)中,所述姿态参数包括:艏摇参数横摇参数η1和纵摇参数η2;艏摇参数表示当前偏航驱动器的角度,横摇参数η1表示所述风力发电设备当前在x轴上摇摆的角度,纵摇参数η2表示所述风力发电设备当前在y轴上摇摆的角度;
[0033]
由此传感器可输出风力发电设备当前倾角θ为:
[0034][0035]
进一步地,步骤(3)中,所述水下空气喷嘴装置的出口面积通过调节喷嘴的输出功率,保证在该方向上输出的推力。
[0036]
进一步地,步骤(4)中,
[0037]
倾斜力矩m
i
由环境力矩的总和的水平分量f
env
产生,倾斜力矩m
i
的计算公式为:
[0038][0039]
其中,f
env
是环境力总和;
[0040]
是环境力总和f
env
作用点到浮心的距离;
[0041]
θ3是风力发电设备与竖直方向倾角;
[0042]
海上风力发电设备平衡系统输出力矩m
sp
的计算式为:
[0043]
m
sp
=f
sp
z
sp
θ3;
[0044]
其中,f
sp
是喷气设备提供推力;
[0045]
z
sp
是喷气设备深度;
[0046]
θ3是风力发电设备与竖直方向倾角;
[0047]
当所述风力发电设备处于小倾角近似值内,水线面积惯性矩m
wp
的计算式为:
[0048]
m
wp
=ρga
w
θ0;
[0049]
其中,a
w
是水线面面积;
[0050]
θ0是偏航倾斜角;
[0051]
ρ是海水密度;
[0052]
g是重力加速度;
[0053]
当风力发电设备与竖直方向倾角θ3在10
°
~15
°
以内时,应用初稳性公式将扶正力矩m
is
计算式为:
[0054]
m
is
=
‑
dhθ3;
[0055]
其中,d是排水量;
[0056]
θ3是风力发电设备与竖直方向倾角;
[0057]
h是横稳心高(即定倾中心高度);
[0058]
负号表示扶正力矩方向相反于倾斜角的方向;
[0059]
假设锚泊线为普通悬链线,利用悬链线公式,计算得到锚泊系统力矩m
mla
为:
[0060][0061]
其中,s是悬链线长度;
[0062]
w是浮重度;
[0063]
z
mla
是锚泊系统作用点的深度;
[0064]
θ1是锚泊系统悬链线底部切线与水平面的夹角;
[0065]
θ2是锚泊系统悬链线顶部切线与水平面的夹角;
[0066]
海上风力发电设备平衡系统输出力矩m
sp
计算式为:
[0067]
m
sp
=f
sp
z
sp
θ3;
[0068]
其中,f
sp
是喷气设备提供推力;
[0069]
z
sp
是喷气设备深度;
[0070]
θ3是风力发电设备与竖直方向倾角;
[0071]
在以上浮体横摇受力分析的基础下,当风力发电设备偏航倾斜角度θ0在8
°
以内时,由力矩平衡原理得到海上风力发电设备平衡关系为:
[0072]
m
i
=m
wp
m
is
m
mla
m
sp
;
[0073]
即即
[0074]
进一步地,喷气设备在风力发电设备开始损伤角度至剧烈损伤角度之间输出功率线性增加,喷气设备提供推力f
sp
的计算式为:
[0075][0076]
其中,θ是风力发电设备当前倾角;
[0077]
ω1是风力发电设备开始损伤角度;
[0078]
ω2是风力发电设备剧烈损伤角度;
[0079]
f
spmax
是水下喷气设备设计最大输出力。
[0080]
进一步地,步骤(5)中,所述设定阈值包括笛卡尔坐标系和姿态给定值;所述笛卡尔坐标系为绝对坐标系,以竖直方向为z轴,以静止时风轮正方向为y轴;姿态给定值包括风力发电设备开始损伤角度ω1和风力发电设备剧烈损伤角度ω2。
[0081]
本发明具有以下技术效果:
[0082]
(1)本发明建立喷气反作用力矩控制模型,形成抑制风塔晃动的反向作用力矩,从而实现风塔的大角度晃动抑制,提高漂浮式海上风电的安全可靠性和环境适应能力,对恶劣海况适应能力强。
[0083]
(2)本发明在正常工作状况下能利用风能蓄电进行压缩空气储气;在面对恶劣海况时能输出反作用力辅助设备抑制倾斜,最大限度地保障风力发电设备安全,能够对海上的丰富风能能够进行有效、合理的利用。
[0084]
(3)本发明抑制风塔晃动的推力来源是空气,在水下排放时对环境无污染,同时也能驱赶附近鱼群,保护风力发电设备水下设备不会受到海洋生物干扰。
附图说明
[0085]
图1是本发明风力发电设备平衡技术的流程图。
[0086]
图2是本发明水下喷气设备设置位置。
[0087]
图3是本发明实施方法流程图。
[0088]
图4是本发明风电设备受力分析。
[0089]
图5是本发明锚泊线简化模拟。
[0090]
图6是本发明水下喷口联动状态模拟。
具体实施方式
[0091]
以下结合附图对本发明的具体实施方式做详细描述,应当指出的是,实施例只是对发明的具体阐述,不应视为对发明的限定,实施例的目的是为了让本领域技术人员更好地理解和再现本发明的技术方案,本发明的保护范围仍应当以权利要求书所限定的范围为准。
[0092]
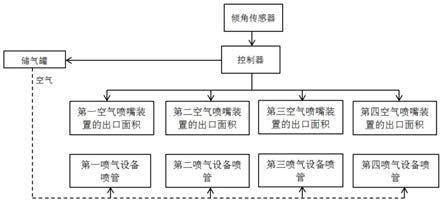
如图1所示,本发明提供一种海上漂浮式风力发电设备动态晃动抑制装置,包括空气压缩装置、水下空气喷嘴装置、风能蓄电装置、倾角传感器和控制器,所述空气压缩储气装置设置在风力发电设备的发电机及桨叶附近,所述水下空气喷嘴装置嵌入风力发电设备的压载舱底部,所述倾角传感器和控制器位于所述风力发电设备的机舱内。
[0093]
优选的,在风力发电设备正常工作时,利用风能蓄电装置以及压缩储气装置进行空气压缩储气,储气装置有多种方式,本文给出具体的两种:第一种是通过齿轮箱转轴带动旋转曲柄,利用旋转曲柄推动气缸活塞进行空气压缩;第二种是利用电能驱动空气压缩机,同时释放过剩电能。
[0094]
如图2所示,所述水下空气喷嘴装置至少设有四个,所述水下空气喷嘴装置的高度低于浮体浮心和风力发电设备重心,所述水下空气喷嘴装置的喷嘴与水平面平行,相邻两个所述水下空气喷嘴装置的喷嘴之间的夹角为90度。
[0095]
优选的,所述喷嘴上设有电磁阀,所述倾角传感器、所述电磁阀和风力发电设备储电模块电信号连接。
[0096]
优选的,所述空气压缩装置包括喷气装置,所述喷气装置包括第一喷气设备喷管、第二喷气设备喷管、第三喷气设备喷管和第四喷气设备喷管,所述第一喷气设备喷管、第二喷气设备喷管、第三喷气设备喷管、第四喷气设备喷管分别通过输气管路与储气罐相连;所
述第一喷气设备喷管、第二喷气设备喷管、第三喷气设备喷管和第四喷气设备喷管上分别设有第一喷管阀、第二喷管阀、第三喷管阀和第四喷管阀。
[0097]
喷气装置之间工作状态相互独立,以调整发电站的工作姿态,空气喷嘴装置输出功率随发电站倾斜角度增大而增加,直到发电站晃动幅度小于设定阈值,喷气暂停。
[0098]
如图3所示,基于上述一种海上漂浮式风力发电设备动态晃动抑制方法,所述方法为:
[0099]
s1,在海况良好、风力发电站正常运行时,利用风能蓄电装置驱动空气压缩装置储气;
[0100]
s2,倾角传感器测量发电机的姿态参数;
[0101]
优选的,所述传感器可以获取所述风塔设备的姿态参数,所述姿态给定值包括横摇给定值和纵摇给定值。
[0102]
优选的,姿态给定值可根据经验值或理论进行预先设置。优选地,控制器在试验阶段确定姿态给定值。
[0103]
根据比较所述姿态参数和所述姿态给定值,以浮力为支撑点,通过杠杆原理和比例积分微分算法计算各喷气设备输出推力,根据所述输出推力来确定各个喷气设备所述喷气量;在喷气设备工作阶段,通过比例积分微分算法随时调整各个喷嘴的喷气量,直至发电设备恢复平衡;
[0104]
所述姿态参数包括:艏摇参数横摇参数η1和纵摇参数η2;艏摇参数表示当前偏航驱动器的角度,横摇参数η1表示所述风力发电设备当前在x轴上摇摆的角度,纵摇参数η2表示所述风力发电设备当前在y轴上摇摆的角度;
[0105]
由此传感器可输出风力发电设备当前倾角θ为:
[0106][0107]
s3,控制器预先确定所述姿态给定值,控制器从传感器获得姿态参数,并根据姿态参数和姿态给定值确定各个方向所需推力,并且根据所需推力确定各个空气喷嘴装置的出口面积s,分别为第一空气喷嘴装置的出口面积、第二空气喷嘴装置的出口面积、第三空气喷嘴装置的出口面积和第四空气喷嘴装置的出口面积;
[0108]
优选的,空气喷嘴装置的出口面积s的计算公式为:
[0109][0110]
其中,s是出口面积;
[0111]
f
sp
是喷气设备提供推力;
[0112]
δp是储气装置内部压强与喷嘴所处水下压强之间的压强差。
[0113]
优选的,所述控制器通过线性波理论、三维格林函数法、浮式基础运动方程模拟海浪对风电设备的影响,并在计算风力载荷时抵消海浪影响;根据abs规范和我国《风力发电机组设计要求》(jb/t 10300
‑
2001)计算风电设备在正常发电和停止发电时的风载荷;以浮力为支撑点,通过力矩平衡分析计算各喷气设备输出推力,发送指令。
[0114]
所述水下空气喷嘴装置的出口面积通过调节喷嘴的输出功率,保证在该方向上输出的推力。
[0115]
s4,结合水下的空气喷嘴装置,由力矩平衡原理建立喷气反作用力矩控制模型,得出环境(海浪、海风等)产生的倾斜力矩m
i
与水线面积惯性矩m
wp
、扶正力矩m
is
、锚泊系统力矩m
mla
、海上风力发电设备平衡系统输出力矩m
mla
四者之和的平衡关系;
[0116]
如图4所示,本发明的海上风电设备受到以下力和力矩,定义正交轴系统,x与风向一致,z轴与x轴垂直且垂直向上,原点与浮心 (f)重合,具体计算过程如下:
[0117]
浮力中心(b)是物体水下体积的质心,假设物体水下体积所受浮力等效成总浮力通过浮力中心起作用;水线是自由水线和浮体表面之间的交叉线,水线面积为水线围绕的面积;假设构成系统的所有重量通过重心(g)起作用;锚泊系统(mla)中心定义为锚绳作用的参照点;作用到漂浮式海上风电设备环境力量是:空气动力、流体动力和水流力,压力中心cp
env
被定义为环境力量f
env
施加作用的点。
[0118]
根据文献(van hees,m.,et al.,2002.study of feasibility ofand boundary conditions for a floating off
‑
shore wind turbines),海上风电设备最大倾斜角应低于10
°
且风电设备倾斜速度和加速度几乎为零,即不考虑风电设备自身的转动惯性。故在设计时,我们考虑海水为理想流体,无旋,不可压缩。
[0119]
倾斜力矩m
i
由环境力矩的总和的水平分量f
env
产生,倾斜力矩 m
i
的计算公式为:
[0120][0121]
其中,f
env
是环境力总和;
[0122]
是环境力总和f
env
作用点到浮心的距离;
[0123]
θ3是风力发电设备与竖直方向倾角;
[0124]
海上风力发电设备平衡系统输出力矩m
sp
的计算式为:
[0125]
m
sp
=f
sp
z
sp
θ3;
[0126]
其中,f
sp
是喷气设备提供推力;
[0127]
z
sp
是喷气设备深度;
[0128]
θ3是风力发电设备与竖直方向倾角;
[0129]
当浮体转动时,平台在波浪中运动时受到垂向扰动力(波浪激励) 需要靠平台做升沉运动产生的变浮力来抵消,而变浮力来源于平台升沉时移出或潜入海水中的体积。对于所述风电设备处于小倾角近似值内,水线面积近似于恒量;当所述风力发电设备处于小倾角近似值内,水线面积惯性矩m
wp
的计算式为:
[0130]
m
wp
=ρga
w
θ0;
[0131]
其中,a
w
是水线面面积;
[0132]
θ0是偏航倾斜角;
[0133]
ρ是海水密度;
[0134]
g是重力加速度;
[0135]
当浮体的横倾处于某一角度时虽左右横摇多次,但最终仍可以回到原平衡的位置,因为船舶横摇时虽然重心和浮心的方向发生改变而不在同一垂直线上,但恰好可以形成使船舶回到平衡点力矩,称为扶正力矩;
[0136]
当风力发电设备与竖直方向倾角θ3在10
°
~15
°
以内时,应用初稳性公式将扶正力矩m
is
计算式为:
[0137]
m
is
=
‑
dhθ3;
[0138]
其中,d是排水量;
[0139]
θ3是风力发电设备与竖直方向倾角;
[0140]
h是横稳心高(即定倾中心高度);
[0141]
负号表示扶正力矩方向相反于倾斜角的方向;
[0142]
如图5所示,假设锚泊线为普通悬链线,利用悬链线公式,t1为地面对悬链线的作用力,作用方向与悬链线在作用点上的切线方向一致,锚泊系统悬链线底部切线与水平面的夹角θ1;t2同理,为风电设备对悬链线的作用力,作用方向与悬链线顶部切线方向一致,锚泊系统悬链线顶部切线与水平面的夹角θ2;x为悬链线两端作用点之间的水平距离,z为作用点之间的垂直距离,s为悬链线长度。
[0143]
通过该受力分析图可以模拟锚泊系统中任意一条锚泊线的受力情况计算得到锚泊系统力矩m
mla
为:
[0144][0145]
其中,s是悬链线长度;
[0146]
w是浮重度;
[0147]
z
mla
是锚泊系统作用点的深度;
[0148]
海上风力发电设备平衡系统输出力矩m
sp
计算式为:
[0149]
m
sp
=f
sp
z
sp
θ3;
[0150]
其中,f
sp
是喷气设备提供推力;
[0151]
z
sp
是喷气设备深度;
[0152]
θ3是风力发电设备与竖直方向倾角;
[0153]
在以上浮体横摇受力分析的基础下,当风力发电设备偏航倾斜角度θ0在8
°
以内时,由力矩平衡原理得到海上风力发电设备平衡关系为:
[0154]
m
i
=m
wp
m
is
m
mla
m
sp
;
[0155]
即即
[0156]
进一步地,喷气设备在风力发电设备开始损伤角度至剧烈损伤角度之间输出功率线性增加,喷气设备提供推力f
sp
的计算式为:
[0157][0158]
其中,θ是风力发电设备当前倾角;
[0159]
ω1是风力发电设备开始损伤角度;
[0160]
ω2是风力发电设备剧烈损伤角度;
[0161]
f
spmax
是水下喷气设备设计最大输出力。
[0162]
s5,在风力等级过大或者恶劣海况导致风力发电站倾斜角度超过设定阈值时,通过水下空气喷嘴装置喷出储存空气,输出海上风力发电设备平衡系统输出力矩m
sp
;
[0163]
所述设定阈值包括笛卡尔坐标系和姿态给定值;所述笛卡尔坐标系为绝对坐标系,以竖直方向为z轴,以静止时风轮正方向为y轴;姿态给定值包括风力发电设备开始损伤角度ω1和风力发电设备剧烈损伤角度ω2。
[0164]
具体实施例:
[0165]
根据美国可再生能源实验室开发的针对海上风力发电机的5mw 水平轴风力机,我们假定风电设备参数如下表所示:
[0166]
参数参数值参数参数值主筒柱平台直径/m9.4排水体积/m38029.21吃水深度/m120叶片直径/m126未拉伸状态锚链长度/m902.2下锚距平台中心线距离/m853.87下锚深度/m320导缆孔深度/m70水中锚链浮重度/kg
·
m
‑3698.094塔架高度/m90定倾中心高度gm/m100
ꢀꢀ
[0167]
海况模拟条件,针对南海潜在风电场海域可能的海况公式,根据相关研究,选取定常风速为11.40m
·
s
‑1。
[0168]
考虑在恶劣海况下,风电设备应处于停止发电状态:
[0169]
停止发电时,作用在风轮固态面积上的平均压力p
h
为
[0170]
p
h
=c
dd
ρ
a
u2;
[0171]
其中,c
dd
为阻力系数;
[0172]
ρ
a
为空气密度
[0173]
u为风速。
[0174]
停止发电时,作用在塔架顶部的水平风力f
h
为:
[0175]
f
h
=p
h
s2;
[0176]
其中,s2为风轮固态面积,即所有叶片在旋转平面上的投影面积之和,一般为风轮扫掠面积的5%~10%。
[0177]
最终可以获得f
sp
≈6000~20000n,计算误差主要来自于悬链线与x轴夹角变化,属于正常范围。
[0178]
本发明储气装置参考“模块化高压储气装置”(公开号: cn209569539u,公开日:2019年10月31日),其设计最大耐压为45mpa;喷口设计参考“出口面积可调二次风喷口装置”(公开号: cn205481098u,公开日:2016年3月21日),利用该技术,水下喷气设备能达到的喷气设备提供推力f
sp
=3.1
×
105n,满足本发明设计需求。
[0179]
如图6所示,由于喷口装置出口面积可调,假设风向与系统x轴出现夹角时,可以调整相邻两个空气喷嘴装置的出口面积,以控制对应喷气设备输出推力。
[0180]
假设夹角为则第一喷气设备喷管调节后需输出推力第二喷气设备喷管调节后需输出推力喷气设备喷管调节后需输出推力
[0181]
根据文献,本发明设计海上风电设备开始受到损伤的角度为8
°
,剧烈损伤角度为12
°
,并设计控制出口面积可调喷口的喷气设备提供推力f
sp
为:
[0182][0183]
其中,f
spmax
是水下喷气设备设计最大输出力,即水下喷气设备在倾角为8
°
时开始工作;
[0184]
在8
°
~12
°
为线性工作区间,输出力随倾角增大而增大;当风电设备倾角大于12
°
时,水下喷气设备工作功率一直保持最大状态。
[0185]
尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

