1.本发明涉及覆铜板加工技术领域,特别涉及一种覆铜板生产后包装的技术领域。
背景技术:
2.覆铜板又名基材,将补强材料浸以树脂,一面或两面覆以铜箔,经热压而成的一种板状材料,称为覆铜箔层压板。它是做pcb的基本材料,常叫基材。当它用于多层板生产时,也叫芯板(core)。
3.现有覆铜板在进行生产完成后需要进行对应的包装处理,现有的包装处理主要还是人工完成,工作效率低,劳动强度大。随后出现了自动打包设备,很好的解决人工打包存在的问题,但现有的自动打包设备主要还是独立工作模式,没有办法结合到生产线上,影响自动化生产,生产效率低。
技术实现要素:
4.本发明的目的在于提供一种用于覆铜板生产分类包装的装置,很好地解决上述技术问题,结合到生产线上,达到连续加工及分类包装,提升生产效率。
5.为达到上述目的,本发明采用如下技术方案:一种用于覆铜板生产分类包装的装置,包括有加工机器及控制系统,所述加工机器的输出端衔接传送单元,该传送单元引导从加工机器输出的产品依次移动到指定点位并使产品对位暂停;以及还包括机械手,该机械手将传送单元上对位暂停的产品移送到指定区域进行码垛,所述指定区域至少包括成品区、次品区及报废品区,其中:成品区上设有第一送料装置及第一打包装置,第一送料装置用于承载产品码垛并将码垛好的产品输出;第一打包装置布置在第一送料装置的送料路线上,且第一打包装置上附带第一烘干器,该第一烘干器用于对准备打包的产品进行除湿烘干;次品区上设有第二送料装置及第二打包装置,第二送料装置用于承载产品码垛并将码垛好的产品输出;第二打包装置布置在第二送料装置的送料路线上,且第二打包装置上附带第二烘干器,该第二烘干器用于对准备打包的产品进行除湿烘干;所述控制系统对本装置的分类包装工作进行控制。
6.上述方案进一步是,所述传送单元包括有支撑架以及传送滚轴,该传送滚轴设置在支撑架上并按水平方向间隔分布,产品在传送滚轴的承载及带动下水平移动;以及在传送单元上还设有侧边定位滚轴,该侧边定位滚轴用于作用产品的侧边并引导产品向指定点位靠拢并对位暂停。
7.上述方案进一步是,所述传送单元上还设有挡板,挡板分布在传送单元的运行末端,该挡板固定在支撑架上并与传送滚轴、侧边定位滚轴一起围合出产品对位暂停的停放空间,该停放空间的外形尺寸与产品的外形尺寸匹配,且挡板上设有压力传感器,该压力传感器受到产品的压力时发出信号给控制系统,控制系统依照压力传感器发出的信号控制机械手工作。
8.上述方案进一步是,所述用于覆铜板生产分类包装的装置还包括有产品检测单元,该产品检测单元布置在加工机器的输出端,产品检测单元至少包含有平面度检测传感器及外形尺寸检测传感器,产品检测单元将检测结果传送给控制系统,控制系统依照产品检测单元给的检测结果控制机械手进行分类移送产品到指定区域进行码垛。
9.上述方案进一步是,所述第一送料装置和第二送料装置并列设置且均为直线送料形态,机械手布置在第一送料装置和第二送料装置之间。
10.上述方案进一步是,所述机械手是五轴机械手,机械手包括有依次连接并可相对运动的底座、转台、大臂、小臂、前爪及吸盘架,吸盘架上设有真空吸盘,机械手通过真空吸盘吸取产品,然后利用机械手上连接点的相对运动将产品移送到指定区域进行码垛。
11.上述方案进一步是,所述底座固定设置,底座的上侧设有向上逐层凸起的齿盘及组装轴,转台组装在组装轴上,且转台上设有第一伺服电机,该第一伺服电机的输出端设有输出齿轮,该输出齿轮与底座上的齿盘啮合,实现第一伺服电机带动输出齿轮旋转,则输出齿轮围绕齿盘运动,达到转台相对底座旋转;大臂的一端铰链连接转台并与第二伺服电机联动,实现第二伺服电机带动大臂相对转台转动,且大臂是围绕第二伺服电机的轴向转动;大臂的另一端通过铰链连接小臂,且小臂与第三伺服电机联动,实现第三伺服电机带动小臂相对大臂转动,且小臂是围绕第三伺服电机的轴向转动;前爪通过铰链连接小臂的末端并与第四伺服电机联动,实现第四伺服电机带动前爪相对小臂转动,且前爪是围绕第四伺服电机的轴向转动;所述吸盘架吊挂在前爪上,前爪上还装载有重量传感器、显示屏、警报装置,重量传感器用于测量机械手所吸取的产品的重量,并将重量显示在显示屏上,警报装置在机械手正常运行时一直处于警报状态。
12.上述方案进一步是,所述控制系统中结合了物联网以及智能控制技术。
13.本发明的有益效果在于:通过传送单元衔接加工机器,实现加工好的产品直接由该传送单元传送,且传送单元还引导从加工机器输出的产品依次移动到指定点位并使产品对位暂停;以便机械手将传送单元上对位暂停的产品移送到指定区域进行码垛,所述指定区域至少包括成品区、次品区及报废品区,实现分类码垛,且成品区上设有第一送料装置及第一打包装置,次品区上设有第二送料装置及第二打包装置,由此达到自动化打包作业,很好的解决人工打包存在的问题,并有效结合到生产线上,适合连续性、自动化加工,生产效率高,适用于工业化生产,也大大节省了工人成本。
14.附图说明:附图1为本发明较佳实施例结构示意图;附图2为图1实施例的俯视结构示意图;附图3为图1实施例的局部结构示意图;附图4为图3实施例的俯视结构示意图;附图5为图1实施例的机械手结构示意图。
15.具体实施方式:以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
16.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是
为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”、“第四”仅用于描述目的,而不能理解为指示或暗示相对重要性。
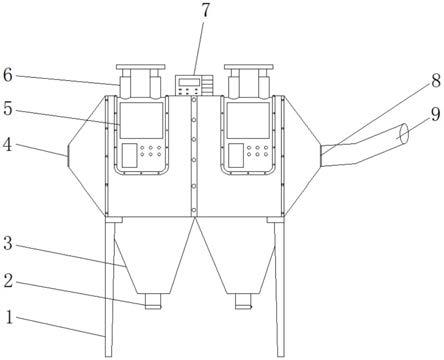
17.参阅图1、2、3、4、5所示,是本发明的较佳实施例示意图,本发明提供一种用于覆铜板生产分类包装的装置,包括有加工机器1及控制系统8,加工机器1可以是对覆铜板切边、蚀刻、钻孔及镀铜等。所述加工机器1的输出端衔接传送单元2,该传送单元2引导从加工机器1输出的产品100依次移动到指定点位并使产品对位暂停;以及还包括机械手3,该机械手3将传送单元2上对位暂停的产品100移送到指定区域进行码垛,所述指定区域至少包括成品区200、次品区300及报废品区400,其中:成品区上设有第一送料装置4及第一打包装置5,第一送料装置4用于承载产品码垛并将码垛好的产品输出;第一打包装置5布置在第一送料装置4的送料路线上,且第一打包装置5上附带第一烘干器51,该第一烘干器51用于对准备打包的产品100进行除湿烘干。次品区上设有第二送料装置6及第二打包装置7,第二送料装置6用于承载产品码垛并将码垛好的产品输出;第二打包装置7布置在第二送料装置6的送料路线上,且第二打包装置7上附带第二烘干器71,该第二烘干器71用于对准备打包的产品100进行除湿烘干。所述控制系统8对本装置的分类包装工作进行控制,控制系统8中还可结合现有的物联网以及智能控制技术,使整个流水线加入物联网系统,用户可以通过终端或者远程设备(手机,电脑等)实时查看工作信息,工作状态,做及时调整。本实施例中,控制系统8包括有控制电箱、智能芯片及显示器,适应当代工业自动化生产。
18.本实施例中,用于覆铜板生产分类包装的装置整体布局为直线分叉式布置,上游为产品加工完毕的出料口,加工完毕的产品100通过传送单元2向下游传送,并在指定点位对位暂停。所述第一送料装置4和第二送料装置6并列设置且均为直线送料形态,机械手3布置在第一送料装置4和第二送料装置6之间,结构布局合理,方便机械手3工作。机械手3根据指令将产品提取至相对应的区域(根据成品、次品、废品进行分类),并在对应区域上直接进行码垛,其中,成品区和次品区上的产品码垛超过设置数量(或重量)时,第一送料装置4或第二送料装置6开始往前运动,运动至第一打包装置5或第二打包装置7处进行自动打包,在打包前,还通过第一烘干器51或第二烘干器71用于对准备打包的产品100进行除湿烘干,打包工作是对整剁产品进行防潮打包(缠绕塑料薄膜)。打包装置是现有技术,在此不再赘述,本方案是将打包装置与送料装置相结合,图中实施例的打包装置呈拱门形设置,方便送料装置穿行送料,还可完成自动打包作业。自动化程度高,生产效率及生产质量大幅提高,克服了现有的生产短板,适用于工业化生产。
19.参阅图1、2、3、4、5所示,本实施例中,所述传送单元2包括有支撑架21以及传送滚轴22,该传送滚轴22设置在支撑架21上并按水平方向间隔分布,产品100在传送滚轴22的承载及带动下水平移动;以及在传送单元2上还设有侧边定位滚轴23,该侧边定位滚轴23用于作用产品100的侧边并引导产品100向指定点位靠拢并对位暂停。进一步地,所述传送单元2上还设有挡板24,挡板24分布在传送单元2的运行末端,该挡板24固定在支撑架21上并与传送滚轴22、侧边定位滚轴23一起围合出产品对位暂停的停放空间,该停放空间的外形尺寸与产品100的外形尺寸匹配,且挡板24上设有压力传感器241,该压力传感器241受到产品100的压力时发出信号给控制系统8,控制系统8依照压力传感器241发出的信号控制机械手3工作,工作准确、可靠,保证机械手抓取有效性。
20.参阅图1、2、3、4、5所示,本实施例中,所述用于覆铜板生产分类包装的装置还包括有产品检测单元9,该产品检测单元9布置在加工机器1的输出端,产品检测单元9至少包含有平面度检测传感器91及外形尺寸检测传感器92,产品检测单元9将检测结果传送给控制系统8,控制系统8依照产品检测单元9给的检测结果控制机械手3进行分类移送产品到指定区域进行码垛。本实施例中,平面度检测传感器91可以是根据光学自准直原理设计,外形尺寸检测传感器92可以是利用激光照射到物体表面反射回来后通过时间差来计算距离,由此获得外形尺寸检测,具体地,平面度检测传感器91及外形尺寸检测传感器92是现有技术,在此用于自动检测,提升自动化生产功效。
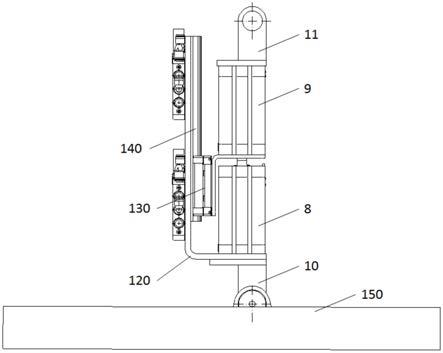
21.参阅图1、2、5所示,本实施例中,所述机械手3是五轴机械手,机械手3包括有依次连接并可相对运动的底座31、转台32、大臂33、小臂34、前爪35及吸盘架36,吸盘架36上设有真空吸盘361,机械手3通过真空吸盘361吸取产品100,然后利用机械手3上连接点的相对运动将产品100移送到指定区域进行码垛。进一步地,所述底座31固定设置,底座31的上侧设有向上逐层凸起的齿盘311及组装轴(图中未示),转台32组装在组装轴上,且转台32上设有第一伺服电机371。该第一伺服电机371的输出端设有输出齿轮3711,该输出齿轮3711与底座31上的齿盘311啮合,实现第一伺服电机371带动输出齿轮3711旋转,则输出齿轮3711围绕齿盘311运动,达到转台32相对底座31旋转,由此实现机械手兼顾抓取产品并移送到成品区200、次品区300及报废品区400进行码垛。大臂33的一端铰链连接转台32并与第二伺服电机372联动,实现第二伺服电机372带动大臂33相对转台32转动,且大臂33是围绕第二伺服电机372的轴向转动。大臂33的另一端通过铰链连接小臂34,且小臂34与第三伺服电机373联动,实现第三伺服电机373带动小臂34相对大臂33转动,且小臂34是围绕第三伺服电机373的轴向转动。前爪35通过铰链连接小臂34的末端并与第四伺服电机374联动,实现第四伺服电机374带动前爪35相对小臂34转动,且前爪35是围绕第四伺服电机374的轴向转动。所述吸盘架36吊挂在前爪35上,前爪35上还装载有重量传感器、显示屏351、警报装置352,重量传感器用于测量机械手所吸取的产品的重量,并将重量显示在显示屏351上,警报装置352在机械手正常运行时一直处于警报状态,包括警报灯和/或警报铃等,提醒工作人员注意,当该机械手异常时,警报装置352停止,且控制系统会自动发送信息至用户端,并进行自我诊断,将异常处显示上,方便维修人员维修。本实施例的机械手可自如根据指令,将产品吸住,并搬运至指定区域,结构简单,动作稳定、可靠。
22.本发明通过传送单元衔接加工机器,实现加工好的产品直接由该传送单元传送,且传送单元还引导从加工机器输出的产品依次移动到指定点位并使产品对位暂停;以便机械手将传送单元上对位暂停的产品移送到指定区域进行码垛,所述指定区域至少包括成品区、次品区及报废品区,实现分类码垛,且成品区上设有第一送料装置及第一打包装置,次品区上设有第二送料装置及第二打包装置,由此达到自动化打包作业,很好的解决人工打包存在的问题,并有效结合到生产线上,适合连续性、自动化加工,生产效率高,适用于工业化生产,也大大节省了工人成本。
23.当然,以上结合实施方式对本发明做了详细说明,只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人了解本发明的内容并加以实施,因此,凡根据本发明精神实质所做的等效变化或修饰,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。