1.本发明涉及包裹分类系统,更具体而言,涉及一种通过区分人口集中地区和其它地区且为了只允许投入并分类对应地区的包裹而利用两个轨道分开进行运营的包裹分类系统。
背景技术:
2.随着快递产业的成长,包裹的物量每年呈增加态势。因此,为了有效地对邮寄物进行分类,邮寄集中局或者物流中心一般会使用包裹分类系统。最近,为了提高处理量,开发出了交叉带式、e
‑
tray式等新的分拣装置并已商用化,其能够分拣小型甚至大型包裹。
3.通常,包裹分类系统由相当于硬件的机械装置结构物、用于控制机械装置的控制单元及用于分拣的信息处理及用于管理分拣机操作的操作软件组成,具体地,机械装置由用于投入物品的供给输送带、将输送带传递的物品高速投放到分类机(sorter)的感应装置(induction)、用于将供给至分类机的物品搬运至分拣口滑槽(chute)的运输工具(carrier或者tray)、用于安装并驱动运输工具的轨道(track)、用于将物品按照目的地分类并排出的滑槽等组成。
4.即,大量包裹分类机为开放或者闭合型的环状,环状部分形成轨道或者环路(loop),环状的边缘具有滑槽。通过感应装置大量连续地将包裹投入到在这种包裹分类机的轨道中,通过滑槽将自动分类的包裹按照目的地进行分拣,利用搬运工具搬运所述分拣的包裹,并将其装载到指定的货物车之后向目的地出发。
5.作为现有技术的韩国公开专利公报第10
‑
2014
‑
0042992号中,如图1所示,公开了一种邮件分类系统,包括:检测单元40,其用于输出临近输送带30、32及34的邮件的长度有关的检测信号sg以使临近的邮件10布置于交叉带20的设定区域,并便于在目的地的排出位置排出邮件;交叉带驱动单元22,其用于控制与交叉带20联动的发动机,所述交叉带20包括中央区域以及以所述中央区域为基准临近两侧面的第一侧区域、第二侧区域,所述中央区域移动布置有来自所述输送带30的所述邮件;以及控制单元44,其用于将控制所述发动机的转数和旋转速度中至少一个的发动机控制信号sc传送至所述交叉带驱动单元,从而基于所述检测信号,将所述邮件布置于所述中央地区以及第一侧地区、第二侧地区中任意一个地区。
6.据了解设置现有包裹分类机时需要较大的空间,由于是以单段构成,因此为了设置所需数量的分拣口滑槽,所需空间较大,需要组建具有充分长度的轨道等,进而存在空间利用率低的问题。最近,考虑到现有物流中心所占有的面积受限但向上方可确保充分大的空间,一种具有崭新结构的包裹分类系统的研究正积极地展开。
7.另外,对于各地区物流中心而言,一般情况下,集中接收该地区内的所有包裹并且集中提供给包裹分类系统后按照目的地进行分离,因此存在输送带和交叉带需要不间断地驱动的问题,现在基于自然形成的城市集中化现象,地区也分为人口集中的大城市地区和其他人口密度低且广泛分布的小城市地区,因此有必要对这些地区的包裹应进行分拣处理
来提高包裹投入和分类效率。
技术实现要素:
8.【技术问题】
9.本发明是为了解决如上所述的现有技术的问题而提出的,因特定大城市的集中化现象导致相关的生活圈内也呈现出人口集中的大城市地区及其他人口密度低且广泛分布的小城市地区,因此,本发明的目的在于通过分拣这些地区的包裹后向包裹分类系统投入并进行分类。
10.此外,另一目的在于,提高单位面积的处理能力以解决物流中心内包裹分类系统所占面积受限的问题。
11.【技术方案】
12.为了实现如上所述的目的,本发明的包裹分类系统包括:轨道,其利用交叉带方式进行驱动;承载管线,其承载作为分类对象的包裹并向所述轨道侧输送;承载管线感应装置,其将通过所述承载管线提供的包裹投入到所述轨道;运输工具,其置于所述轨道的上侧,并以承载投入的包裹的状态,随着所述轨道的驱动一起移动;滑槽,其沿着所述轨道设置有多个,且使所述轨道上的包裹按目的地进行排出;五面图像处理单元,其置于所述轨道的一侧,且用于读取标记在包裹的上面和侧面的包裹信息,并且感知所述轨道上包裹的位置;反馈管线,其将未经所述五面图像处理单元读取的包裹重新投入到所述轨道;以及控制单元,其利用由所述五面图像处理单元传递的所述包裹信息来确定用于排出包裹的滑槽,所述轨道具有组成一对的第一轨道和第二轨道,并分别处理包裹集中地区的包裹及其以外地区的包裹,其中,进一步包括当非对应地区的包裹被误投时为了使所述包裹能够输送到对应的轨道而用于连接第一轨道和第二轨道的捷径管线;以及将通过所述捷径管线提供的包裹投入到所述轨道的捷径管线感应装置。
13.此外,在所述承载管线中进入所述承载管线感应装置之前的一部分上连续且相隔地布置有多个计量输送机,具有一面图像处理单元,其设置于所述计量输送机之间的下部,并通过所述计量输送机之间的相隔空间,读取标识在所述包裹底面的所述包裹信息之后传递给所述控制单元。
14.此外,经所述一面图像处理单元读取的同时投入到所述承载管线的包裹将依次被赋予包裹固有编号,所述计量输送机的各包裹导入单元具有传感器单元,其测定已赋予所述包裹固有编号的包裹的长度并向所述控制单元传递。
15.此外,所述控制单元通过实时地比较沿着所述计量输送机依次输送的包裹所包括的所述包裹固有编号和所述包裹长度在内的追踪信息,从而删除与最初测定的长度值存在预定差值的包裹的所述包裹固有编号,对于以所述包裹固有编号被删除的状态投入到所述轨道的包裹,通过与所述轨道中设置的所述五面图像处理单元联动并赋予以重新分类的编号序列开始的包裹固有编号。
16.此外,在所述捷径管线中进入所述捷径管线感应装置之前的一部分上连续且相隔地布置有计量输送机,所述计量输送机的一侧具有用于读取标识在包裹上的包裹信息的三面图像处理单元,判断将包裹送往所述捷径管线的轨道上的包裹信息和在接收所述包裹的捷径管线的所述计量输送机中读取的包裹信息是否相同,当不同时,对所述包裹赋予以重
新分类的编号序列开始的包裹固有编号。
17.此外,所述计量输送机的各包裹导入单元均设置有传感器单元,其测定已赋予包裹固有编号的包裹的长度并向所述控制单元传递,所述控制单元通过实时地比较沿着所述计量输送机依次输送的包裹所包括的所述包裹固有编号及所述包裹的长度在内的追踪信息,从而删除与最初测定的长度值存在预定差值的包裹的所述包裹固有编号并投入到所述轨道之后,与所述轨道中所具有的所述五面图像处理单元联动并赋予以重新分类的编号序列开始的包裹固有编号。
18.此外,由所述第一轨道和第二轨道组成的所述轨道设置成沿垂直框架的上下多段结构,各段中沿着第一轨道和第二轨道设置的所述滑槽在各段都具有用于投入包裹的投入口的同时连接各段并利用最下段下侧设置的一个排出口将包裹排出。
19.此外,所述捷径管线在各段都具有第一捷径管线和第二捷径管线,所述第一捷径管线从所述第二轨道朝所述第一轨道传送包裹,所述第二捷径管线从所述第一轨道朝所述第二轨道传送包裹。
20.此外,在具有多段的所述轨道中,通过翻车机将小型轻量的包裹以无人方式大量投入到上部段轨道。
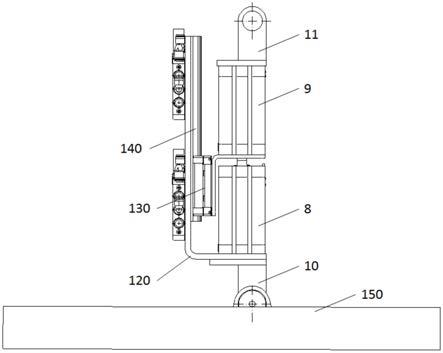
21.此外,所述承载管线和所述反馈管线及所述捷径管线包括由多段结构形成的所述轨道且由所述输送机构成,通过梁支架和吊杆连接并以吊挂在空中的状态布置,并且相互交叉或者平行地驱动,所述梁支架和吊杆从用于设置系统的建筑物的天棚的水平方向的支梁垂直延伸。
22.【有益效果】
23.根据本发明的包裹分类系统及其方法,通过将包裹分类装置的轨道捆绑成一个垂直的框架并形成上下多段结构,各段由两个轨道并列形成,各段的轨道相互由捷径输送机连接,从而可显著地提高包裹分类系统单位面积(m2)上的处理能力,进而具有在狭小面积上能够有效地组建系统的效果。
24.此外,考虑到自然形成的特定大城市集中化现象,按轨道划分人口集中地区及其它地区,从而实现对包裹的划分,进而相比于将投入和分类一起处理的情况十分有效。
25.此外,通过捷径输送机将各段之间的轨道进行连接,具有大量投入过程中将其它轨道中误投的包裹利用捷径输送机供给至适当的轨道的效果。
26.此外,各段中即使有一个轨道发生故障导致中断,也能够利用独立的其它轨道,实现至少50%以上的驱动,从而具有可确保连续操作的效果。
27.此外,通过实现扫描轨道上移动的大量的六面体包裹的一面(包裹与轨道接触的部分,下面),从而具有能够读取输送机上移动的包裹的整个六面的包裹信息(条码、目的地信息等)的效果。
28.因此,当同时大量投放包裹时,即使无需利用单排机对齐包裹的标识后再投入也能够读取包裹整个六个面,从而具有能够大幅度减少供给包裹的人力及时间、分类时间等的效果。
附图说明
29.图1是现有技术的包裹分类系统的结构的示意图。
30.图2是根据本发明一实施例的包裹分类系统的第一段结构的示意图。
31.图3是根据本发明一实施例的包裹分类系统的第二段结构的示意图。
32.图4是根据本发明一实施例的包裹分类系统的第三段结构的示意图。
33.图5是根据本发明一实施例的包裹分类系统的承载管线的详细结构图。
具体实施方式
34.本说明书及权利要求书中使用的术语或者用语不能仅以通常或者字典上的含义局限性地进行解释,应该依据发明人为了能够以最佳的方法说明该发明可适当地定义术语的概念的原则,以符合本发明的技术思想的含义和概念进行解释。
35.因此,本说明书中记载的实施例和附图中图示的结构只是本发明的优选一实施例,不代表本发明的技术思想的全部,应该理解在本发明的申请日可能会存在能够取代它们的各种等同物和变形例。
36.下面参照附上的附图对本发明的优选实施例进行详细说明。
37.图2至4是根据本发明一实施例的包裹分类系统的各段(第一段、第二段、第三段)结构的示意图,图5是根据本发明一实施例的包裹分类系统中的承载管线的详细结构图。
38.如图所示,本发明的包裹分类系统包括:轨道110,其以交叉带方式驱动;承载管线120,其用于承载作为分类对象的包裹10并向轨道110侧输送;承载管线感应装置125,其将通过承载管线120供给的包裹投入到轨道110;运输工具112,其置于轨道110的上侧且以承载基于承载管线感应装置125投入的包裹的状态随着轨道110驱动一起移动;滑槽140,其沿着轨道110设置有多个且使轨道110上的包裹按目的地排出;五面图像处理单元150,其置于轨道110的一侧且用于读取标记在包裹的上面及侧面的包裹信息且感知轨道110上包裹的位置;以及控制单元(未图示),其利用由五面图像处理单元150传递的包裹信息确定用于排出包裹的滑槽140。
39.此外,进一步包括反馈管线160,其将未经五面图像处理单元150读取的包裹重新投入到轨道110。
40.此外,轨道110具有组成一对的第一轨道110a和第二轨道110b,分别处理包裹集中地区的包裹及其它地区的包裹,而且为了使非对应地区的误投的包裹能够输送到其它轨道110,进一步包括用于连接第一轨道110a和第二轨道110b的捷径管线180以及将基于捷径管线180提供的包裹投入到轨道110的捷径管线感应装置185。
41.具体地,轨道110是开放或者闭合的环形环路(loop),通过输送轮发动机系统(conveyor wheel motor system)进行循环,并且由交叉带方式进行驱动。
42.另外,轨道110具有组成一对的第一轨道110a和第二轨道110b,分别接收包裹集中地区的包裹及其它地区的包裹并进行处理,通过承载管线感应装置125、捷径管线感应装置185等接收投入的包裹。
43.承载管线120由输送机构成,承载从车辆卸载的包裹并进行输送的同时连续向承载管线感应装置125提供。
44.承载管线感应装置125可使通过承载管线120连续提供的包裹投入到轨道110,并使包裹承载到第一轨道110a和第二轨道110b上的运输工具112。
45.承载管线120可以为各种数量或者类型,但是根据图示的实施例,第一段由12个单
个的承载管线构成,第二段由2个大量承载管线和4个单个承载管线构成,第三段由8大量承载管线(包括翻车机)和2个单个承载管线构成。
46.另外,在当包裹进入承载管线感应装置125之前的承载管线120的一部分中以相隔的状态连续地布置有多个计量(metering)输送机122。计量输送机122是指为了计测或者读取包裹而连续且相隔地设置的小型输送机。此时,第一计量输送机与第二计量输送机122之间相比于其它部分相隔较宽,其下部设置有一面图像处理单元124,通过计量输送机122之间的相隔空间可读取从上侧通过的包裹10底面标记的包裹信息,而读取的包裹信息将传递至控制单元。
47.一面图像处理单元124可通过反射镜(未图示)等读取包裹下面的包裹信息。
48.交叉带式的轨道110上移动的大致六面体的包裹的一面(包裹与轨道接触的部分,下面)不能被扫描到,因此承载管线120上具备的一面图像处理单元124和轨道110上具备的五面图像处理单元150需要一起操作,从而可读取输送机上移动的包裹的整个六个面的包裹信息(条码、目的地信息等)。
49.现有技术不能在交叉带上对包裹的下面进行拍摄,因此只能利用手工将包裹逐一放到输送机上,而且尽可能地利用手工将包裹逐一放到输送机上以使包裹的标识(barcode)能从上面或者侧面看到。
50.本发明通过采取能够从下面拍摄并处理图像的方式以避免手工对齐包裹,从而实现了成批(bulk)供给的方式。例如,即使将包裹同时大量地投入且不使用单排机(singulator)对齐包裹的标识,也能够读取整个六个面,从而可大幅度地减少供给包裹所需的人力及供给时间、分类时间等。
51.另外,在一面图像处理单元124读取的同时或者之后,对投入到承载管线120的包裹依次赋予包裹固有编号(parcel identification number,pid),计量输送机122的各包裹导入单元具有传感器单元126,其通过一面图像处理单元124测定已赋予包裹固有编号的包裹的长度并传递给控制单元。
52.控制单元接收传感器单元126传递的追踪(tracking)信息并实时地进行比较,对于与最初测定的长度值相比具有预定差值的问题包裹,删除其包裹固有编号,从而可防止后续包裹的包裹固有编号后推的现象,其中,所述追踪(tracking)信息包括通过计量输送机122依次输送的包裹的包裹固有编号及包裹的长度(和/或体积)。
53.控制单元控制一面图像处理单元124、五面图像处理单元150、三面图像处理单元184等的同时接收它们读取的包裹信息,并且参与包裹固有编号的删除或者新包裹固有编号的赋予等。
54.在基于所述传感器单元126的追踪程序中,对于以包裹固有编号被删除状态投入到轨道110中的包裹,通过与轨道110上设置的五面图像处理单元150进行联动,可赋予以重新分类的编号序列(例如,如果在承载管线120中赋予以100序列开始的固有编号,则在轨道110上可重新赋予以700序列开始的固有编号)开始的包裹固有编号,从而输送机可不中断地工作。
55.作为一实施例,虽然说明了执行追踪程序的传感器单元126、186和用于扫描读取图像的图像处理单元124、184单独构成的情况,但是也可以仅由传感器单元126、186或者图像处理单元124、184中任意一个构成且同时执行追踪过程和图像读取过程。
56.运输工具112位于轨道110的上部且由多个排列而成,以承载有向轨道110供给的包裹的状态,随着轨道110的驱动一起移动的同时将包裹投入到按目的地区分的滑槽140中后排出。
57.此时,如果运输工具112上承载的包裹的投入靠近预定的滑槽140,则考虑到轨道110的行进速度,通过运输工具的驱动手段(未图示)控制运输工具112的方向或者倾斜度,从而可使包裹投入到预定的滑槽140的投入口141。
58.运输工具112进一步包括使承载的包裹在运输工具112上以一定程度对齐的包裹对齐手段(centralizing sensor,未图示),包裹对齐手段可以是通过对运输工具112上承载的包裹的侧面适当地施加压力并解除的棒式(bar)或者板(plate)式,根据包裹的大小(宽度、高度、重量等)来确定对齐手段的大小以及施压强度等。
59.此外,板或者棒内置于运输工具112中并根据需要可突出或者隐匿,并且可具有预定的曲率或者可变曲率,或者为多个板相互铰链连接的方式,从而与大致六面体的包裹适当地紧贴并进行施压。
60.沿着轨道110的一侧或者两侧具有多个滑槽140,滑槽140具有投入口141和排出口142以使轨道110上的包裹基于各滑槽向相同目的地排出。滑槽140可由螺旋形(spiral)滑升装置构成。
61.五面图像处理单元150通过读取可标记在包裹上的包裹的目的地信息并向控制单元传递,具体通过识别附着在包裹上的文字等来获得。另外,目的地信息也可通过另行设置在承载管线感应装置125上的扫描器或者服务器等传输至控制单元。
62.五面图像处理单元150通过线扫描相机等拍摄轨道110上的包裹来识别包裹信息并进行分类,尤其是不同于上述的一面图像处理单元124,可读取除了与轨道110接触的下面以外包括包裹的上面及四个侧面的五个面上标记的包裹信息。
63.此外,五面图像处理单元150通过连续地感知轨道110上移动的包裹位置并向控制单元传递位置信息。
64.控制单元通过利用五面图像处理单元150传递的包裹的目的地信息和/或包裹的位置信息,从而确定用于排出轨道110上的包裹的滑槽140。
65.反馈管线160由输送机构成,将未经五面图像处理单元150读取的包裹重新投入到轨道110,第一轨道110a和第二轨道110b分别具有第一反馈管线160a和第二反馈管线160b。
66.捷径管线180作为用于连接两个独立的轨道即第一轨道110a和第二轨道110b的输送机,当五面图像处理单元150读取非对应地区的处理轨道即非事先设置的轨道中误投的包裹时,可通过捷径管线180输送至另一轨道110。
67.同样,可通过调节运输工具112的倾斜度、移动方向及速度将包裹移动至对应的捷径管线180。
68.捷径管线180在每段中都具有第一捷径管线180a、第二捷径管线180b,第一捷径管线180a将包裹从第二轨道110b传送至第一轨道110a,第二捷径管线180b将包裹从第一轨道110a传送至第二轨道110b。
69.此时,通过捷径管线180提供的包裹通过捷径管线感应装置185投入到轨道110。
70.此外,包裹进入捷径管线感应装置185之前的捷径管线180的一部分上连续且相隔地布置有计量输送机182,计量输送机182的一侧具有三面图像处理单元184,其用于读取包
裹上标记的包裹信息。
71.因此,判断接收包裹的捷径管线180的计量输送机182的三面图像处理单元184中读取的包裹信息是否与将误投的包裹向捷径管线180传递的轨道110中的包裹信息和追踪信息匹配,如果不相匹配则在删除对应包裹的包裹固有编号后赋予以重新分类的编号序列(例如800序列)开始的新的包裹固有编号,之后执行基于传感器单元186的追踪程序。
72.此外,在计量输送机182中用于导入包裹的部分分别具有传感器单元186,其用于测定已赋予包裹固有编号的包裹的长度(和/或体积)并向控制单元传递。
73.控制单元通过实时地比较追踪信息,删除与最初测定的长度值存在预定差值的包裹的包裹固有编号,所述追踪信息包括沿着计量输送机182依次输送的包裹的包裹固有编号和包裹的长度。
74.在基于传感器单元186的追踪步骤中,包裹固有编号被删除的包裹通过捷径管线感应装置185投入到轨道110之后,通过与轨道110所具有的五面图像处理单元150进行联动,赋予以重新分类的编号序列(例如900序列)开始的包裹固有编号。
75.例如,就韩国国内而言,包裹密集在包括首尔在内的京仁地区,京仁地区将在第一轨道110a中处理,剩下的所有地区将在第二轨道110b中处理。
76.人类生活的地方,不论是在世界任何地方都存在大城市集中化现象。例如,中国的江苏省分为上海直辖市和苏州市,北京为中心的河北省的城市也以天津市和北京市为中心发展,剩余的地区发展相对迟缓。美国加利福尼亚也只有la和旧金山比较发达,而其它地区相对发展迟缓,因此,世界任何地区都存在人口偏向于大城市的现象。鉴于此,相比于以目的地为基准将国内的所有地区划分到一个轨道110的情况,划分成人口集中地区(或者包裹集中地区)及其它地区的两个轨道或者环路来分开处理包裹的方式十分有用。
77.根据一实施例,目的地为包括首都圈的京仁地区的包裹本应向第一轨道110a提供,却被误提供到第二轨道110b,对于这种的情况,可通过由第二轨道110b朝第一轨道110a方向连接的送往首都圈的捷径管线即第一捷径管线180a移动。
78.对于相反的情况,可通过由第一轨道110a朝第二轨道110b方向连接的送往地方圈的捷径管线即第二捷径管线180b移动,从而对于目的地误读的包裹或者因失误而误提供至与目的地所属的地区不相匹配的轨道的包裹,可迅速且准确地进行分类而不在轨道中反复。
79.另外,对于通过由第二轨道110b朝第一轨道110a方向连接的送往首都圈的捷径管线即第一捷径管线180a移动的情况,利用有线或者无线通信接收误投包裹在第二轨道110b中的所述包裹信息及追踪信息,并判断是否与接收包裹的第一捷径管线180a的计量输送机182的三面图像处理单元184中读取的包裹信息相匹配,如果匹配则接下来将执行基于传感器单元186的追踪程序,如果不相匹配则删除所述包裹的包裹固有编号并赋予新的包裹固有编号之后移动至传感器单元186并执行追踪程序。
80.捷径管线180的数量不受限制,轨道110在多个地点通过捷径管线180相互连接,从而将各地区误提供的包裹传输给预定的轨道。
81.对于无需按地区区分的情况而言,也可以通过解除捷径管线180的连接而独立地使用第一轨道110a和第二轨道110b,根据所需情况也可以只使用一个轨道。
82.另外,由第一轨道110a和第二轨道110b组成的轨道110可沿着共同的垂直框架安
装成上下多段结构。
83.因此,各轨道110中设置或者连接的各构件如承载管线感应装置125、运输工具112、五面图像处理单元150、反馈管线160、捷径管线180等也将按段设置。
84.滑槽140以连接各段的形式构成,各段都具有滑槽140的投入口141,最下段的下侧具有排出口142。因此,利用投入口141接收各段的各轨道110a、110b投入的包裹并通过一个排出口142排出。
85.根据一实施例,在三段中分别设置的轨道110中,第一段和第二段设为处理重量包裹,上部的第三段处理小型/轻量包裹,如图4所示,在第三段中进行大量承载时,通过翻斗机(tipper)以无人的方式大量地投入小型轻量的包裹,而且通过分离机(splitter)和漏斗(hopper)进行分流并提供到轨道110,从而可在狭小面积上对大量的物量进行分类。
86.此外,如图2所示,当在第二段中大量承载时,采用串联(cascade)、单排机及分离机向轨道110提供包裹。
87.此外,在处理中型以上的包裹的第一段与处理小型包裹的第三段之间连接有小型/中大型分流供给管线190、190a及190b,通过此可将预定为由各段处理但是因错误承载等导致向其他段提供的包裹进行归还处理。
88.此外,不同于各段中设置的反馈管线160、160a及160b,由于第一段和第二段都可处理中大型包裹,当第一段或者第二段的处理速度等产生差异时,为了按上下段的轨道反馈连接,连接第一段与第二等的上下段反馈管线170由第一上下段反馈管线170a和第二上下段反馈管线170b构成,通过此能够调节各段可处理的物量。
89.此外,也可以将三段的第一轨道110a全部分配为处理集中地区,只有一个段的第二轨道110b分配为处理其它地区,这可由控制单元通过软件进行控制。
90.如上所述,为了分开处理包裹,需要两个轨道。因此如图所示,在构成3段的分类系统时,仅主输送机就有28(12 6 10)个承载管线120,6(2 2 2)个反馈管线160、170,10(2 4 4)个捷径管线180,共为44个,并包括两个漏斗及处理返回包裹的平台(platform)等,在狭小区域形成密集状态。
91.因此,通过最优化空间结构使建筑物天棚的水平方向的支梁(sub beam)呈3段结构,通过从支梁垂直延伸的梁支架(beam supporter)和吊杆(hanger)而连接并形成在空中且具有以最优的方式挂掉的状态,并且进一步利用阶梯(ladder)状且具有支撑方式的横梁等,使输送管线相互交叉或者平行地工作。所述复杂的输送机移动路线是需要细密且精巧地制作和设置的复杂且艰难的工程,但是系统的组建使整体有机地连接并驱动。
92.特别是,需要1500件以上的钢支撑结构(steel supporting structure),通过设计2重、3重交叉支撑梁,可安置2重、3重交叉的输送机并运行。这种艰难的工程无法通过目前习知的三维cad设计,因此,很多部分是通过现场定制来实现的。结果,发明了世界上首个支援3段轨道交叉带分类机的最优化系统。由此,通过该系统组成的设备(facility)可设置成世界上最有效且最优化以包括44个输送管线和两个交叉带轨道和两个漏斗和五个以上的平台。
93.另外,对该系统进行标准化,将建筑物的设计与系统对应地也进行标准化。支梁的复杂制作和设置问题属于建筑领域,可通过标准化得以解决,从而可事先解决设置建筑物和机械时的相互冲突和矛盾。
94.对电子设备和控制装置及用于整体运行的运行管理软件也进行标准化。该所有过程可通过进行标准化来缩短包裹分类系统的工期、提高质量、节约施工费用、缩短调试期间,从而可减少总施工费用及运维费用。
95.根据本发明的系统设计及设置,首次实现了可支持以下包裹分类机的系统,其可将单位时间(h)、单位面积(m2)的包裹处理能力为0.6piece/m2/h以下的现有的包裹分类机的效率提升至3.3piece/m2/h。
96.如上所述,本发明图示并说明了优选实施例,但本发明不限受限于上述实施例,在不超出本发明精神的范围内本发明所属技术领域具有通常知识的人员可进行各种变更和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。