1.本发明涉及一种基于图像比对的行李安检分拣系统,属于安检设备技术领域。
背景技术:
2.目前,对于行李/包裹的安全检查一般采用x光机对行李/包裹进行扫描,在x光机的计算机显示器上呈现出行李/包裹内物体的透视图像,安检人员根据该图像的外轮廓或特定的颜色判断是否有违禁品。由于人工判图主要取决于人的识别能力和反应速度,因此安检机的扫描速度一般在0.2米/秒左右,同时,检查的需要,要求安检人员看图时精力要集中,这样无疑增加安检人员的劳动强度。我们经常看到,在火车站、地铁站的安检入口,有大量人员拥挤的现象。
3.提高安检效率,一直是有关部门所希望的。近年来,图像识别技术在安检系统使用越来越广泛,为提高图像识别的准确度提供了一种技术方式。但因为行李/包裹中的物品复杂,危险品的种类又很多,所以现有的安检机所配备的自动识别系统都是一种辅助系统。有安检机与自动分拣装置组成的系统在一些机场可以见到,这些系统同样存在速度较低,基于人工识图,且应用场合受到限制,如要求行李/包裹要规整,非规整的行李/包裹需事先放置在框中,等等,严重影响了安检效率。
技术实现要素:
4.本发明的目的是提供一种基于图像比对的行李安检分拣系统,以解决安检分拣系统效率低的问题。
5.本发明为解决上述技术问题而提供一种基于图像比对的行李安检分拣系统,该安检系统包括安检机、分拨机和控制器,安检机包括安检机输送带和安检通道;分拨机包括分拨输送带,其上设置有分拨通道,分拨通道设置有推送装置;还包括:
6.图像检测装置,包括设置在安检通道处的第一摄像机和设置在分拨机处的第二摄像机,第一摄像机和第二摄像机均与控制器连接,所述第一摄像机用于在第一待触发装置检测到包裹时对包裹进行拍照,所述第二摄像机用于在第三待触发装置检测到包裹时对包裹进行拍照;
7.第一待触发装置,与控制器连接,设置在安检通道入口处,用于在检测到包裹时触发,向第一摄像机发送采集指令,控制第一摄像机对安检通道入口处的包裹进行拍照,并将采集到的包裹外形图发送给控制器;
8.第三待触发装置,与控制器连接,设置分拨通道入口处,用于在检测到包裹时触发,向第二摄像机发送采集指令,以控制第二摄像机对进入分拨机的包裹进行拍照,并将采集到的包裹外形图发送给控制器;
9.安检机对进入安检通道的包裹进行检测;
10.当检测出包裹为危险品时,所述控制器对其接收到的由第一摄像机发送的最新的包裹的外形图进行危险品标记,将标记有危险品指示的外形图称为包裹第一外形图,并生
成分拨指令;控制器将分拨指令生成之后接收到的第二摄像机采集到的外形图与包裹第一外形图进行比对,若比对成功,则比对成功的由第二摄像机采集的外形图对应的包裹确定为违禁包裹,控制推送装置启动,将违禁包裹分拣出。
11.本发明安检分拣系统利用图像比对技术对安检机检测出的危险品进行定位,即通过在安检机和分拨机上分别设置图像采集设备,以分别采集进入安检机和分拨机的包裹的外形图,在安检机检测出包裹为危险品时,对相应安检机处采集到包裹外形图进行标记,将标记的外形图与分拨机处采集到包裹外形图进行比较,若一致,说明该分拨机处包裹外形图对应的包裹为危险品,是需要分拨机分拣出的,以此来实现对危险品的定位。通过上述过程,本发明能够快速、自动、准确地实现危险品包裹的分拣,大大提供了安检分拣系统的效率。
12.进一步地,为避免安检机进行无效工作,所述的还包括第二待触发装置,第二待触发装置与控制器连接,设置在安检通道内,用于在检测到包裹时向控制器发出检测指令,以控制安检机对进入安全通道内的包裹进行检测。
13.进一步地,为提高分拣的准确性,还包括第四待触发装置,第四待触发装置与控制器连接,设置在推送装置内,用于在推送装置收到启动指令后,检测到包裹时向控制器发出推送指令,以控制推送装置进行分拨。
14.进一步地,为方便实现分拣,所述推送装置包括推送板、推送导轨以及推送电机,推送电机驱动推送板沿着推送导轨移动。
15.进一步地,还包括复检机,当检测出包裹为危险品时,控制器将标记有危险品指示的外形图发送给复检机。
16.进一步地,所述的第一待触发装置、第三待触发装置均为光障。
17.进一步地,,所述的控制器包括安检控制器、安检计算机、图像比对服务器和分拨控制器,安检计算机和图像比对服务器之间通信连接,第一待触发装置与第一摄像机连接,第一摄像机与安检计算机连接,第三待触发装置与第二摄像机连接,第二摄像机与图像比对服务器连接,图像比对服务器与分拨控制器连接,分拨控制器还控制连接推送装置,安检控制器控制安检机。
18.进一步地,为防止推送装置在受阻时强行运行,所述的推送电机采用带有过流保护的控制电路,该控制电路包括串设在推送电机电源回路中的过流保护器,过流保护器用于在推送电机受阻时产生过流保护。
附图说明
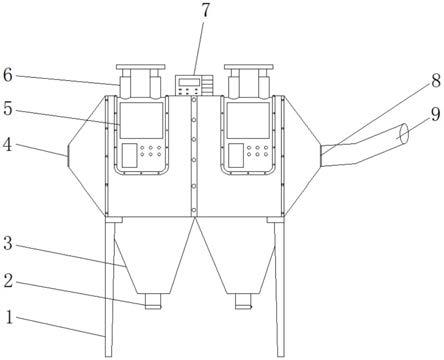
19.图1是本发明基于图像比对的行李安检分拣系统的结构示意图;
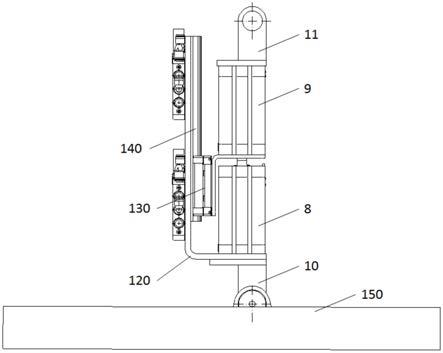
20.图2是本发明分拨机的结构示意图;
21.图3是本发明基于图像比对的行李安检分拣系统的电气连接图;
22.图4是本发明安检机输送带电机m2的控制电路原理图;
23.图5是本发明分拨机主输送带电机m3的控制电路原理图;
24.图6是本发明推送电机m5的控制电路原理图;
25.图7是本发明分拨机副输送带电机m6的控制电路原理图;
26.图8是本发明各电机控制回路中控制开关的控制原理图;
27.图9是本发明各指示灯的控制电路图;
28.图中:1为前端输送带;2为安检机输送带;3为分拨机主输送带;31为分拨机副输送带;4为后端输送带;5为第一摄像机;6为指示灯;7为安检计算机;8为图像识别服务器;9为复检机;10为第二摄像机;11为推送板;12为安检通道;13为分拨通道;14为推送导轨;81为图像对比服务器;101、102、103、104、105、106为电机;201、202、203、204、205为光障;301、302、303、304为位置开关;305为复位开关。
具体实施方式
29.下面结合附图对本发明的具体实施方式作进一步地说明。
30.本发明安检分拣系统利用图像比对技术对安检机检测出的危险品进行定位,即通过在安检机和分拨机上分别设置图像采集设备,以分别采集进入安检机和分拨机的包裹的外形图,在安检机检测出包裹为危险品时,对相应安检机处采集到包裹外形图进行标记,将标记的外形图与分拨机处采集到包裹外形图进行比较,若一致,说明该分拨机处包裹外形图对应的包裹为危险品,是需要分拨机分拣出的,以此来实现对危险品的定位。如图1所示,本发明的安检系统包括安检机和分拨机,安检机包括有安检机输送带2和电机102(即安检机输送带电机m2),分拨机包括有分拨机主输送带3、后端输送带4、驱动分拨机主输送带3的电机103(分拨主带电机m3)和后端输送带4以及后端输送带电机104(m4)。包裹可以直接放到安检机输送带2上,也可以通过前端输送带1输送到安检机输送带2上,前端输送带1由电机101(即前端输送带电机m1)带动。
31.其中安检机输送带上设置有安检通道12,安检通道12内设置有一个或多个x射线发生器(x1,x2),以及由多个探测器(da1—da
n
)组成的线型探测阵列,用于对包裹进行x射线扫描。安检通道12的前端设置有光障201(即安检通道外光障g1),用于在包裹输送至g1所处位置时发送触发信号,g1一般设置在安检通道12的入口处;安检通道12的顶部靠近前端的位置设置有第一摄像机5,用于在包裹到达安检通道12的前端触发光障g1时对包裹进行拍照,第一摄像机5将拍摄的包裹外形图发送给控制器;安检通道12的内部设置有光障202(即安检通道内光障g2),用于当包裹输送至g2所处位置时向控制器发送触发信号,控制安检通道12内的x射线发生器工作,线型探测阵列将得到扫描图像通过数据处理单元dp发送给控制器。
32.分拨机输送器如图2所示,包括分拨机主输送带3、分拨机副输送带31、电机103(即分拨机主输送带电机m3)、电机106(即分拨机副输送带电机m6),分拨机主输送带电机m3带动分拨机主输送带3工作,用于将包裹输送至后端输送器,分拨机副输送带电机m6带动分拨机副输送带31工作,用于将被分拨出的危险品进行输送;后端输送器包括后端输送带4和电机104(即后端输送带电机m4),后端输送带电机m4带动后端输送带4工作,用于将包裹输送出。
33.分拨机主输送带3上设置有分拨通道13,分拨通道13的前端设置有光障203(即分拨通道前光障g3),用于当包裹输送至g3所处位置时发送触发信号,分拨通道13上方设置有第二摄像机10,第二摄像机10根据g3的触发信号对运送至分拨通道前端的包裹进行拍照。分拨通道13内设置有推送装置,推送装置包括推送导轨20,电机105(即推送电机m5),推送板11;当收到推送指令后,推送电机m5控制推送板p沿着推送导轨,将危险品推送至分拨机
副输送带31;同时分拨通道13内还设置有位置开关301(即开关k1)、位置开关302(即开关k2)、位置开关303(即开关k3)、位置开关304(即开关k4)、以及复位开关305(即开关k5);开关k1和开关k2设置在推送的起始位置,为常闭开关;开关k3和开关k4设置在推送的终止位置;开关k5为人工控制的按钮。
34.分拨通道13的内部设置还设置有光障204(即分拨通道后光障g4,为反射式的光障),用于当包裹输送至g4所处位置时发送触发信号;分拨通道的顶部靠近前端的位置设置有指示灯6,用于通过不同的颜色表示分拨机的工作状态;分拨机副输送带31上设置有光障205(即分拨机副通道出口光障g5)。
35.安检机和分拨机的电气连接关系如图3所示,其中控制器包括安检计算机7、图像识别服务器8、图像对比服务器81,分拨控制器9和安检控制器。多个探测器(da1—da
n
)连接数据处理单元dp的输入端,数据处理单元dp的输出端连接安检计算机7的输入端,安检计算机7与图像识别服务器通信连接,且安检计算机7连接复检机,完成危险品的识别和标识。第一摄像机5连接安检计算机7,以将所拍摄的照片发送至安检计算机7。安检计算机7中将接收到的扫描图像进行物质分类,生成包裹透视图,发送给图像识别服务器判断是否是为危险品,图像识别服务器将判断结果反馈给安检计算机。当判断出危险品时,安检计算机对其接收到的由第一摄像机发送的最新的包裹的外形图进行危险品标记;若不是危险品,则不进行标记,若是,将该包裹的外形图发给图像对比服务器,图像服务器将该图同第二摄像机所拍摄的图像进行比对,若比对成功,向分拨机控制器传送推送指令。
36.安检计算机7与显示器连接,以显示生成的图像;键盘输出连接安检计算机7和安检控制器,以实现控制信号的输入。
37.安检控制器的输入端连接安检通道内光障g2,安检控制器的输出端连接x射线发生器、以及数据处理单元dp,用于接收到安检通道内光障g2的触发信号后,控制x射线发生器以及数据处理单元dp工作。安检控制器还输出连接安检机输送带电机m2的电机控制器,以控制安检机输送带电机m2、的工作状态。
38.同时安检计算机7与分拨控制器通信连接;分拨控制器的输入端连接安检通道外光障g1、分拨通道前光障g3、分拨通道后光障g4(g4的连接关系图3中未画出),分拨控制器的输出端连接指示灯6、安检机输送带电机m2、分拨机主输送带电机m3、推送电机m5、分拨机副输送带电机m6,以通过接收的信号完成指示灯6和各电机的控制。
39.安检通道外光障g1与第一摄像机5连接,用于安检通道外光障g1触发时,发送触发信号给第一摄像机5,第一摄像机5进行拍照,g3与第二摄像机10连接,用于光障g3触发时,发送触发信号给第二摄像机10,第二摄像机10进行拍照;电机m3、m5和m6均由分拨控制器控制连接。
40.安检机输送带2的工作状态由m2控制,m2的控制回路如图4所示,在m2的供电线路上串联有开关k以及开关kz2
‑
1(开关kz2
‑
1的控制由控制线圈kz2实现,控制线圈kz2的控制如图8所示,为分拨控制器发出的控制指令实现)。开关k以及开关kz2
‑
1闭合,m2启动;当需要安检机输送带2暂时停止工作时,控制开关kz2
‑
1断开,当需要安检机输送带2继续工作时,按下开关k5后,控制开关kz2
‑
1闭合。
41.分拨机主输送带3的工作状态由m3控制,m3的控制回路如图5所示,在m3的供电线路上串联有开关kz3
‑
1(开关kz3
‑
1的控制由控制线圈kz3实现,控制线圈kz3的控制如图8所
示,为分拨控制器发出的控制指令实现)和开关k1,kz3
‑
1为分拨控制器的开关控制输出,非瞬时状态;开关k1为推送板11的位置开关,是常闭开关,推送板11在起始位置时,k1处于闭合状态,此时,m3的运行或停止由kz3
‑
1控制;当危险品触发g4时,分拨控制器控制kz3
‑
1断开,m3断电,分拨机主输送带3停止工作。
42.关于前端输送带电机m1、后端输送带电机m4可以实现单独的控制,本发明对此不做限制。
43.本发明的行李安检系统的工作过程如下
44.1)除分拨机副输送带31之外,所有输送带开启工作,包裹18放置在前端输送带1上,由前端输送带1将包裹输送至安检机输送带2上。
45.2)当包裹到的安检通道前端时,g1检测到包裹,g1被触发,第一摄像机5拍摄包裹的外形图,并将拍摄到外形图发送给安检计算机;并在包裹进入安检通道后,g2被触发,安检机控制器控制x射线发生器工作,扫描包裹,由线型探测阵列采集信息;包裹离开g2时,安检机控制器控制x射线发生器关闭,结束扫描包裹。
46.3)dp对线型探测阵列采集的信息进行处理,并传输至安检计算机7,安检计算机7根据线型探测阵列采集的信息生成该包裹的透视图;并将生成的透视图传输至图形识别服务器;图形识别服务器对图像进行识别,判断出是否为危险品,如果包裹为危险品,则将该包裹进行标识;图形识别服务器将标识结果(标识结果为有标识和没有标识)返回安检计算机7,安检计算机7记录该包裹的标识状态。
47.4)若包裹没有标识,则表明包裹正常,安检计算机7向分拨控制器发出放行指令;若包裹有标识,则表明包裹为危险品,安检计算机7对接收到的由第一摄像机采集的最新的包裹外形图进行危险品标记,将标记有危险品指示的外形图称为包裹第一外形图;安检计算机7将包裹第一外形图传送给图像对比服务器81,同时将此外形图和带有危险标记的透视图一并传送给复检机。
48.5)当包裹到达分拨机主输送带,g3被触发时,第二摄像机对达到的包裹进行拍照,并将拍摄的外形图发送给图像对比服务器,图像服务器将第二摄像机拍摄的外形图与安检计算机传送来的包裹第一外形图进行比对,判断是否是同一包裹的外形图;安检计算机可采用现有的图像比对算法实现,例如神经网络算法等。
49.6)若不相同,表明触发g3的包裹为非危险品,分控控制器控制放行;若相同,表明触发g3的包裹为危险品,是需要推送的包裹,向分拨机控制器发送推送指令;
50.7)分拨控制器控制推送装置进入推送程序,控制指示灯6由绿色变为黄色(黄灯表明危险品处理工作开始),当检测到g3的状态由遮挡变为通路时,表明包裹全部进入分拨机输送带,控制安检机输送带2停止工作,指示灯6由黄色变为红色(这里红灯不闪烁,表明即将开始推送,但无需人工处理)。
51.8)g4检测到包裹时,g4被触发,表示危险品达到推送位置,分拨控制器控制分拨机主输送带3停止工作。分拨机主输送带3停止工作后,控制推送电机m5工作,推送装置启动;当推送板11将危险品推送到位(这里指推送到分拨机副输送带31),控制推送板11复位,且控制分拨机副输送带31工作。
52.当推送板p离开初始位置,推送危险品后,开关k1动作,由常闭状态变为断开状态,此时可以闭锁m3,使得m3一直处于断电状态。
53.本步骤中,推送板11的工作状态由推送电机m5(推送电机m5为直流电机,当然也可以采用交流电机,并且采用交流电机时控制回路不变)控制,m5的控制回路如图6所示,m5的供电线路上串联有开关jc5
‑
1、过流保护器i和开关jc
‑
1,m5两端并联有时间继电器tt(为避开m5启动时的启动电流的冲击)。开关jc
‑
1由控制线圈jc控制,控制线圈jc的供电线路上串联有开关kjc,开关jc
‑
1的初始状态保证m5为正转;开关jc5
‑
1由控制线圈jc5控制,控制线圈jc5的供电线路上串联有开关kz5
‑
1(开关kz5
‑
1的控制由控制线圈kz5实现,控制线圈kz5的控制如图8所示,为分拨控制器发出的控制指令实现),当分拨控制器控制开关kz5
‑
1闭合,控制线圈jc5带电,开关jc5
‑
1由断开变为闭合,过流保护器i和时间继电器tt启动,m5带电正转;当分拨控制器检测到开关k3动作时(也即推送板11将危险品推送到位),控制开关kjc闭合,控制线圈jc带电,使得开关jc
‑
1动作,进而m5反转,驱动推送板11返回初始位置。
54.在推送过程中,如果m5受阻,产生过流保护,过流保护器i和时间继电器tt复位,且控制开关kz5
‑
1断开,m5停止工作,推送板停留在故障位置,同时控制指示灯6进行红灯闪烁,提示需要人工干预(人工将危险品取走放置在分拨机副输送带31上,按下开关k5进行复位,继续推送处理)。
55.分拨机副输送带31的工作状态由m6控制,m6的控制回路如图7所示,在m6的供电线路上串联有开关jc6
‑
2,m6的两端并联有时间继电器tt1,开关jc6
‑
2由控制线圈jc6控制;控制线圈jc6的供电线路上串联有开关ktt1(即时间继电器tt1的常闭触点),并且开关jc6
‑
1(开关jc6
‑
1由控制线圈jc6控制)、开关k3、以及按钮kan(人工按钮)并联后与开关ktt1串联。当推送板11将危险品推送到位,k3动作,由断开变为闭合,控制线圈jc6带电,jc6
‑
1闭合,使jc6保持吸合状态,同时jc6
‑
2闭合,m6启动,分拨机副输送带31运送包裹,同时时间继电器tt1带电。时间继电器tt1的动作时间设置为m6启动到分拨机副输送带31运送包裹到指定位置的时间,因此当时间达到预定的时间,tt1动作时,ktt1由常闭变为断开状态,jc6线圈断电,jc6
‑
1,jc6
‑
2断开,m6停止运行,tt1复位,回路恢复初始状态。
56.9)当推送板11复位后(也即检测到开关k1和开关k2闭合),控制开关kz5
‑
1断开,推送电机m5断电,且控制开关kjc断开,m5复位正转;同时,控制开关kz3
‑
1以及开关kz2
‑
1闭合,安检机输送带2以及分拨机主输送带3运行。
57.10)人工复检时,根据危险品的外形图和透视图进行危险品的核对。
58.上述实施例中,指示灯6中可显示绿灯、黄灯、和红灯,每个灯的控制如图9所示,通过分拨控制器下发的指令,经过光耦和继电器进行控制。
59.上述实施例中,安检机是获取包裹透视图的设备,安检机可以是线扫描型设备也可以是ct型设备;设备可以装设一个射线源或多个射线源;设备可以包含一个接受器或多个接收器,本发明对此不做限制。
60.上述实施例中,为了减小控制器的计算量,安检机配置有数据处理单元dp、安检计算机7、图像对比服务器81、图像识别服务器8和安检控制器作为安检机的处理单元,分拨控制器作为分拨机数据处理的处理单元,不同的处理单元处理不同的工作任务,作为其他实施方式,不考虑控制器计算量的情况下,也另外采用一个单独的控制器完成所有的计算和控制工作,例如由安检计算机7同时完成图像识别、对比功能等,本发明对此不做限制。
61.并且g2和g4均是为了判断包裹是否到位的检测装置,在人为判断是否包裹是否到位时,g2和g4也可以不设置。
62.上述实施例中,为了保证危险品被推出,推送装置包括推送板和推送导轨,作为其他实施方式,也可以采用推送杆等其他设备进行推送,本发明对此不做限制。
63.上述实施例中,危险品离开第三光障时,表明危险品彻底离开安检机输送带2,为了避免后续包裹在安检机输送带2的堆积,控制安检机输送带2停止工作,同时,违禁包裹达到推送位置时,为了保证推送的准确性,控制分拨机主输送带3停止工作,作为其他实施方式,在包裹较小、推送速度快的情况下,安检机输送带2、分拨机主输送带3也可以不停止工作。
64.本发明利用图像比对的方式,实现了危险品的定位,进而准确的将危险品分拣出,减少人工工作量,提高分拣效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。