1.本发明涉及喷涂设备技术领域,尤其涉及一种基于自动化控制的智能喷涂机器人。
背景技术:
2.喷涂机器人又叫可进行自动喷漆或喷涂其他涂料的工业机器人,通过喷涂机器人前置的ccd摄像头监控系统,实时监控喷涂状态。
3.经检索,申请号为cn201911365502.3的专利:一种基于自动化控制的智能喷涂机器人,利用水环向下喷出水帘,隔开了ccd摄像头和工件,当工件上的油漆反弹时会首先接触到喷出的水帘,水帘将反弹油漆吸收,起到隔绝吸收作用,有效的避免了油漆反弹到ccd摄像头上,确保了ccd摄像头的监测效果,确保了喷漆效果,但是也存在一些不足:喷漆作业时,油性油漆不用于水,虽然可通过油水的分离的设备,除去水中的油漆,但单纯的依靠水帘隔离油漆,需要频繁对水帘用水进行除杂过滤,导致设备的实用性较低,且部分油漆属于水性油漆,会溶于水,被水帘吸收溶解后,无法轻易除去溶于水中的油漆,需要频繁更换水帘用水,使得喷气设备的实用性较差;此外,水帘在喷出后形成水幕,其落入回水槽板中时仍具有较大的动能,触及回水槽板底部时会大量的溅出,随着设备的持续工作,水帘用水会出现较大的损耗,水量损耗过多,会导致水帘无法形成水幕,其隔离油漆的作用也大幅度减弱;利用液压杆带动清洗刷对ccd摄像头进行清洁,清洗刷仅产生上下方向的运动,清洗刷上易存留杂质,造成二次污染。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的问题,而提出的一种基于自动化控制的智能喷涂机器人。
5.为了实现上述目的,本发明采用了如下技术方案:一种基于自动化控制的智能喷涂机器人,包括底座和喷涂机构,所述喷涂机构包括设置在移动座上的移动块,连接于所述移动块上的活动喷漆臂安装有喷漆头,通过连接杆与所述活动喷漆臂连接的ccd摄像头,所述移动座上方设置有水环,所述移动座上设有与水环对应的回水槽板,所述底座顶壁贯穿设有移动座,所述移动座上设有用于喷射空气以形成气帘的除漆机构;所述除漆机构包括与回水槽板内壁贯穿转动连接有多个第一杆,所述第一杆侧壁固定有叶轮,所述第一杆的一端依次固定有凵形架a和凵形架b,所述凵形架a和凵形架b的弯折部均转动连接有第二杆,所述回水槽板侧壁上下部分别通过拉杆固定有泵气盒,所述泵气盒内均密封滑动连接有活塞,所述第二杆均转动连接在对应的一个活塞上,所述水环侧壁设有多个用以喷气的上喷气头,所述上喷气头与泵气盒连通,所述回水槽板侧壁固定连接有多个朝上方喷气的下喷气头,所述下喷气头与泵气盒连通。
6.进一步,所述底座内设有空腔,所述水环下侧开设有喷出水帘的开口,所述回水槽
板呈环形结构,所述回水槽板的竖直截面呈凵字形结构,多个所述叶轮均设置于回水槽板内,所述凵形架a和凵形架b的弯折部互呈度角,所述底座底壁固定连接有多个万向轮。
7.进一步,所述除漆机构还包括固定连接回水槽板内壁的多个挡水板,所述挡水板与叶轮的数量一致,所述挡水板位于对应的一个叶轮上侧位置。
8.进一步,所述除漆机构还包括开设在泵气盒内壁的进气孔和出气孔,所述进气孔和出气孔内均设有单向阀,所述出气孔通过多个软管与多个上喷气头固定连通,所述出气孔通过多个软管与下喷气头固定连通。
9.进一步,所述底座上设有使移动座旋转的转动部件,所述底座上固定连接有缓冲部件,所述空腔内设有过滤部件。
10.进一步,所述底座的空腔内装有水体,所述移动座呈倒凸字形结构,所述移动座的底端插设于水体内,所述移动座的底端固定连接有潜水泵,所述潜水泵通过出水管和多个支撑管固定连通,所述移动座内壁设有回流管,所述回流管的一端和回水槽板连通,所述回流管远离回水槽板的一端和底座内的空腔连通。
11.进一步,所述除漆机构还包括开设在泵气盒内壁的环形腔,所述环形腔内密封滑动连接有环形磁块,所述活塞内设有磁体,所述环形腔内壁开设有吹气孔和抽气孔,所述吹气孔和抽气孔内均设有单向阀,所述吹气孔均通过单向管和气囊固定连通。
12.进一步,所述活动喷漆臂内壁开设有滑腔,所述滑腔内壁贯穿转动连接有第三杆,所述第三杆侧壁固定连接有齿轮,所述第三杆远离齿轮的一端固定有刷毛柄,所述滑腔内壁通过弹簧弹性连接有齿条,所述齿条和齿轮啮合连接,所述齿条底部固定连接有滑块,所述滑块密封滑动连接在滑腔内,所述滑腔内设有平衡孔,所述滑腔通过连通管和气囊固定连通,所述连通管内设有开放式安全阀。
13.本发明具有以下优点:1、在喷涂作业中,使喷出的水帘从多个途径对多个叶轮一侧的叶片进行冲击,叶轮带动第一杆转动,从而通过两个活塞的密封滑动,使得上、下喷气头之间形成气帘,在气帘的保护作用下,将将大部分重量较轻的油漆小颗粒吹离,穿过气帘的少量大颗粒油漆可被水帘隔离,二道隔离不仅可提高油漆隔离的效果,同时可以减少进入水帘中油漆的量,避免频繁停机过滤、清理或者更换水帘用水;同时利用水帘的动能驱动叶轮转动,进而为了气帘的形成提供动力,在不增加能耗的提前下,即可实现二道隔离,同时水帘的动能转化给水轮的转动的机械能,可有效减小水帘冲击回水槽板时溅起的量,进而减少水帘用水的损耗,降低人工补水的频率,提高了设备的实用性;2、利用叶轮带动圆柱凸轮转动,进而通过齿条、齿轮和第三杆等结构来带动刷毛柄转动,刷毛柄上的刷毛对ccd摄像头上的杂质进行清洁,同时刷毛柄在快速转动的过程中,将通过离心力作用,将刷毛上刷除的杂质进行甩出,具有自清洁的功能,相对于现有技术中采用液压杆推动清洁刷进行清洁,不仅无需额外使用动力设备,减少了能耗,同时充分的利用了水帘的动力,采用压气和瞬时排气的方式驱动清洁刷动作,实现了定时清洁,无需人工控制,使得设备自动化程度更高,更加节省人力成本。
附图说明
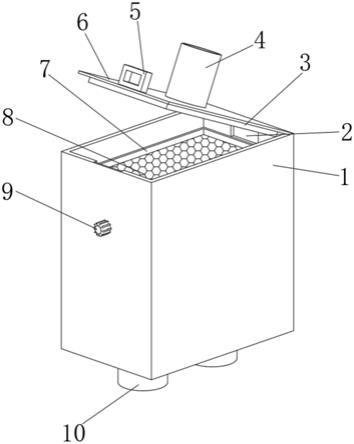
14.图1为本发明提出的实施例一的结构示意图;
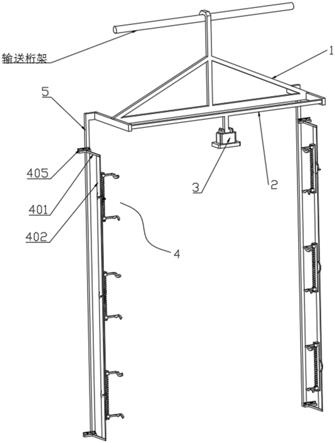
图2为图1中a部分结构的放大示意图;图3为本发明提出的实施例二的结构示意图;图4为实施例二中泵气盒沿竖直方向剖视的结构示意图。
15.图中:1底座、201回水槽板、202第一杆、203叶轮、204凵形架a、205凵形架b、206泵气盒、207活塞、208第二杆、209下喷气头、210支撑管、211水环、212上喷气头、213挡水板、215进气孔、216出气孔、301回流管、302潜水泵、401环形腔、402环形磁块、403吹气孔、404抽气孔、405气囊、501滑腔、502齿条、503滑块、504齿轮、505第三杆、506刷毛柄、10移动座、11连接杆、12ccd摄像头、14移动块、15活动喷漆臂、16喷漆头、17万向轮。
具体实施方式
16.实施例一参照图1
‑
2,一种基于自动化控制的智能喷涂机器人,包括底座1和喷涂机构,喷涂机构包括设置在移动座10上的移动块14,连接于移动块14上的活动喷漆臂15安装有喷漆头16,通过连接杆11与活动喷漆臂15连接的ccd摄像头12,移动座10上方设置有水环211,移动座10上设有与水环211对应的回水槽板201,底座1顶壁贯穿设有移动座10,移动座10上设有用于喷射空气以形成气帘的除漆机构;除漆机构包括与回水槽板201内壁贯穿转动连接有多个第一杆202,第一杆202侧壁固定有叶轮203,第一杆202的一端依次固定有凵形架a204和凵形架b205,凵形架a204和凵形架b205的弯折部均转动连接有第二杆208,回水槽板201侧壁上下部分别通过拉杆固定有泵气盒206,泵气盒206内均密封滑动连接有活塞207,第二杆208均转动连接在对应的一个活塞207上,水环211侧壁设有多个用以喷气的上喷气头212,上喷气头212与泵气盒206连通,回水槽板201侧壁固定连接有多个朝上方喷气的下喷气头209,下喷气头209与泵气盒206连通。
17.底座1内设有空腔,水环211下侧开设有喷出水帘的开口,回水槽板201呈环形结构,回水槽板201的竖直截面呈凵字形结构,多个叶轮203均设置于回水槽板201内,凵形架a204和凵形架b205的弯折部互呈180度角,底座1底壁固定连接有多个万向轮17,潜水泵302将水体泵液到水环211内,接而水体从水环211下侧的开口处喷出,形成水帘。
18.除漆机构还包括固定连接回水槽板201内壁的多个挡水板213,挡水板213与叶轮203的数量一致,挡水板213位于对应的一个叶轮203上侧位置,挡水板213位于叶轮203的一侧上部,从水环211向下喷出的水帘对叶轮203另一侧的叶片进行冲击,使得叶轮203可以进行快速的转动。
19.除漆机构还包括开设在泵气盒206内壁的进气孔215和出气孔216,进气孔215和出气孔216内均设有单向阀,出气孔216通过多个软管与多个上喷气头212固定连通,出气孔216通过多个软管与下喷气头209固定连通,进气孔215内的单向阀只允许外界的气体抽入到泵气盒206内,而出气孔216内的单向阀只允许泵气盒206内的气体挤压到上、下喷气头内喷出。
20.底座1上设有使移动座10旋转的转动部件,底座1上固定连接有缓冲部件,空腔内设有过滤部件,移动座10贯穿转动连接在底座1上,以上均为现有技术,在此不进行赘述。
21.底座1的空腔内装有水体,移动座10呈倒凸字形结构,移动座10的底端插设于水体
内,移动座10的底端固定连接有潜水泵302,潜水泵302通过出水管和多个支撑管210固定连通,移动座10内壁设有回流管301,回流管301的一端和回水槽板201连通,回流管301远离回水槽板201的一端和底座1内的空腔连通,潜水泵302将空腔内的水体泵液到水环211内,将电能转化为水体的机械能,并且使水体从水环211下侧喷出时具有一定的机械能,从而提高对叶轮203的冲击力。
22.本实施例中,通过喷涂机构完成喷涂作业中的移动、转动和喷涂等功能。
23.在喷涂作业中,打开潜水泵302,潜水泵302将空腔内的水体泵液到水环211内,使水体从水环211下侧的开口处喷出形成水帘,形成水帘的部分水体首先进入到回水槽板201内,接而对多个叶轮203一侧的叶片进行冲击,使叶轮203产生转动。
24.当叶轮203转动后,将带动第一杆202转动,从而第一杆202带动凵形架a204和凵形架b205转动,使得凵形架a204和凵形架b205分别带动对应的一个第二杆208运动,使得第二杆208均带动对应的活塞207在一个泵气盒206内上下往复密封滑动,通过进气孔215从外界抽入气体,并且通过出气孔216将气体挤压到到多个上喷气头212和多个下喷气头209处喷出,上、下喷气头喷出的气体具有一定的宽度,使得上、下喷气头之间形成气帘,在气帘的保护作用下,将将大部分重量较轻的油漆小颗粒吹离,穿过气帘的少量大颗粒油漆可被水帘隔离,二道隔离不仅可提高油漆隔离的效果,同时可以减少进入水帘中油漆的量,避免频繁停机过滤、清理或者更换水帘用水;同时利用水帘的动能驱动叶轮转动,进而为了气帘的形成提供动力,在不增加能耗的提前下,即可实现二道隔离,同时水帘的动能转化给水轮的转动的机械能,可有效减小水帘冲击回水槽板时溅起的量,进而减少水帘用水的损耗,降低人工补水的频率,提高了设备的实用性。
25.同时,因凵形架a204和凵形架b205弯折处互呈180度,在凵形架a204和凵形架b205的作用下,将始终有一个活塞207处于挤压气体进入到上、下喷气头内的状态,而另一个活塞207则处于从外界补充气体的状态,使得形成气帘的过程中连续可靠。
26.实施例二参照图3
‑
4,本实施例与实施例一不同的是:除漆机构还包括开设在泵气盒206内壁的环形腔401,环形腔401内密封滑动连接有环形磁块402,活塞207内设有磁体,环形腔401内壁开设有吹气孔403和抽气孔404,吹气孔403和抽气孔404内均设有单向阀,吹气孔403均通过单向管和气囊405固定连通,环形磁块402和磁体极性相反互为磁吸力。
27.活动喷漆臂15内壁开设有滑腔501,滑腔501内壁贯穿转动连接有第三杆505,第三杆505侧壁固定连接有齿轮504,第三杆505远离齿轮504的一端固定有刷毛柄506,滑腔501内壁通过弹簧弹性连接有齿条502,齿条502和齿轮504啮合连接,齿条502底部固定连接有滑块503,滑块503密封滑动连接在滑腔501内,滑腔501内设有平衡孔,滑腔501通过连通管和气囊405固定连通,连通管内设有开放式安全阀,在气体压力达到设定值后,可将超压的气体在短时间内排出,推动滑块503和齿条502在滑腔501内滑动,从而带动啮合连接的齿轮504转动,使得齿轮504通过第三杆505带动刷毛柄506转动,平衡孔起到在齿条502滑动一段距离后使气体溢出的作用,刷毛柄506呈长条形结构,非转动状态时对ccd摄像头12的工作不产生干扰。
28.本实施例中,活塞207在上下往复运动时,因磁体和环形磁块402极性相反互为磁
吸力,那么活塞207将带动环形磁块402在环形腔401内密封滑动,从而将外界的气体抽入到环形腔401内,接而再进行挤压,通过单向管进入到气囊405内,气体在气囊405内进行压缩,当达到开放式安全阀的设定值后,使气体进入到滑腔501内,进而推动滑块503和齿条502同步向上运动,当齿条502在滑腔501内滑动时,将带动啮合连接的齿轮504转动,使得齿轮504通过第三杆505带动刷毛柄506转动,刷毛柄506上的刷毛对ccd摄像头12上的杂质进行清洁,同时刷毛柄506在快速转动的过程中,将通过离心力作用,将刷毛上刷除的杂质进行甩出,具有自清洁的功能,相对于现有技术中采用液压杆推动清洁刷进行清洁,不仅无需额外使用动力设备,减少了能耗,同时充分的利用了水帘的动力,采用压气和瞬时排气的方式驱动清洁刷动作,实现了定时清洁,无需人工控制,使得设备自动化程度更高,更加节省人力成本。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。