1.本发明属于空间机器人技术领域,涉及一种非合作卫星抓捕机械手,具体指适用多种非合作卫星抓捕的自适应空间机械手。
背景技术:
2.由于大多数卫星没有专门用于在轨捕获的合作目标标志器或合作抓捕手柄,所以面向非合作目标的在轨捕获已然成为各航天强国大力发展的战略技术。而星箭对接环作为卫星的通用结构,具有结构特征显著、易于识别和强度高等特点,可作为理想的在轨捕获对象。然而,星箭对接环规格多样、尺寸参数不一,导致捕获机构非常复杂(us 2015/0314893 al,技术难度大,且现有捕获机构抓捕对象单一cn 106628278 a、cn 109131956 a、cn 109131955a),无法适应多种对接环抓捕。
技术实现要素:
3.本发明需要解决的技术问题是:现有的机械手存在无法适应多种星箭对接环的抓捕的问题,进而提供一种适用多种非合作卫星抓捕的自适应空间机械手。
4.本发明为解决上述技术问题采用的技术方案是:
5.所述的适用多种非合作卫星抓捕的自适应空间机械手包括固定支撑壳体、驱动机构、滚珠丝杠轴、丝杠螺母、内捕获手指、外捕获手指、两个导向机构、深沟球轴承组件和角接触球轴承组件,所述的固定支撑壳体包括支撑外壳和上盖板,所述的上盖板固装在支撑外壳的上端口处,深沟球轴承组件固装在上盖板的下板面上,所述的驱动机构固装在支撑外壳内的下端,所述的滚珠丝杠轴竖直安装在支撑外壳内,且滚珠丝杠轴的一端与驱动机构固连,滚珠丝杠轴的另一端伸入到深沟球轴承组件内,所述的丝杠螺母套装在滚珠丝杠轴上,所述的角接触球轴承组件套装在滚珠丝杠轴的下端并固定在支撑外壳内;所述的两个导向机构分别设置在支撑外壳内的两侧,并用于内捕获手指和外捕获手指的导向作用;
6.它还包括摆动机构和自适应支撑机构,所述的摆动机构套在丝杠螺母上,内捕获手指和外捕获手指的底端分别安装在摆动机构的两侧,自适应支撑机构设置在上盖板上。
7.本发明与现有技术相比产生的有益效果是:
8.1、本发明中的摆动机构实现了内捕获手指和外捕获手指的相对摆动,有效解决不同星箭对接环外凸缘和内环面高度不一致时的自适应问题,使得内捕获手指和外捕获手指均可以和对接环内环面和外凸缘的接触,并具有一定的锁紧功能,适用于不同非合作卫星星箭对接环的抓捕,例如国际航天器通用的660型星箭对接环28(630mm)、937型星箭对接环25(937mm)、1194型a星箭对接环26(1194mm)和1194型b星箭对接环27(1194mm);
9.2、本发明采用压缩弹簧实现自适应支撑板的上下运动,可适应不同星箭对接环底部不同高度的凸起台阶面,保证凹陷的底平面和固定支撑板接触,增大星箭对接环和空间机械手的接触面积,提高空间机械手抓捕星箭对接环后的连接刚度;
10.3、本发明中的电机和制动器为主、备份的双绕组结构,驱动器和控制器为主、备份
结构,从而提高了空间机械手的可靠性。
附图说明
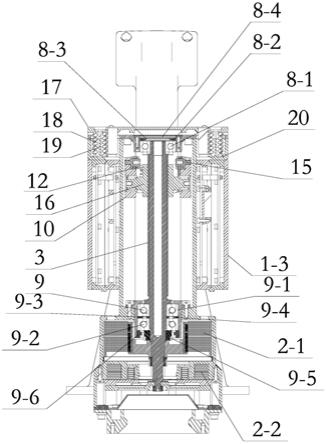
11.图1为适用多种非合作卫星抓捕的自适应空间机械手的剖面图1;
12.图2为适用多种非合作卫星抓捕的自适应空间机械手的剖面图2;
13.图3为适用多种非合作卫星抓捕的自适应空间机械手的结构示意图;
14.图4为适用多种非合作卫星抓捕的自适应空间机械手的剖面图3;
15.图5为适用多种非合作卫星抓捕的自适应空间机械手的结构示意图;
16.图6为连接件4的剖面图;
17.图7为连接件4的结构示意图;
18.图8为图5中a
‑
a处的剖视图;
19.图9为适用多种非合作卫星抓捕的自适应空间机械手的结构示意图;
20.图10为摆动连杆的结构示意图;
21.图11为摆动连杆的剖视图;
22.图12为自适应支撑机构的剖视图;
23.图13为自适应支撑机构的结构示意图;
24.图14为多种星箭对接环的剖视图;
25.图15为星箭对接环的局部剖视图。
具体实施方式
26.下面结合附图并通过具体实施例来进一步说明本发明的技术方案:
27.如图1、图2和图3所示,所述的适用多种非合作卫星抓捕的自适应空间机械手包括固定支撑壳体1、驱动机构2、滚珠丝杠轴3、丝杠螺母16、内捕获手指5、外捕获手指6、两个导向机构7、深沟球轴承组件8、角接触球轴承组件9、摆动机构、自适应支撑机构和快换接口组件23,所述的固定支撑壳体1包括支撑外壳1
‑
1和上盖板1
‑
2,所述的上盖板1
‑
2固装在支撑外壳1
‑
1的上端口处,深沟球轴承组件8固装在上盖板1
‑
2的下板面上,所述的驱动机构2固装在支撑外壳1
‑
1内的下端,所述的滚珠丝杠轴3竖直安装在支撑外壳1
‑
1内,且滚珠丝杠轴3的一端与驱动机构2固连,滚珠丝杠轴3的另一端伸入到深沟球轴承组件8内,所述的丝杠螺母16套装在滚珠丝杠轴3上,所述的角接触球轴承组件 9套装在滚珠丝杠轴3的下端并固定在支撑外壳1
‑
1内;所述的两个导向机构7分别设置在支撑外壳1
‑
1内的两侧,并用于内捕获手指5和外捕获手指6的导向作用;所述的摆动机构套在丝杠螺母16上,内捕获手指5和外捕获手指6的底端分别安装在摆动机构的两侧,自适应支撑机构设置在上盖板1
‑
2的正上方。
28.如图4至图9所示,本实施例中,所述的摆动机构包括一个连接件4、两个摆动连杆 10、两个第一扭簧固定支架11、两个扭簧12、两个扭簧导向柱15、两个支撑轴13和多个滚针轴承14;所述的连接件4套在丝杠螺母16上,且连接件4相对的两侧端面上各设置一个转轴4
‑
1;在每个转轴4
‑
1的安装端面上,转轴4
‑
1的两侧各设置一个限位凹槽4
‑
3;在连接件4的上端面上,斜对角的位置各开有一个第一安装孔4
‑
2;所述的第一扭簧固定支架11通过螺钉安装在连接件4上的第一安装孔4
‑
2上;所述的摆动连杆10的两端各开有一个第二安装孔
高度,并且弹簧导向柱19的上表面到自适应支撑板17上表面的距离大于星箭对接环凸起的台阶面高度的距离,也就是说,当星箭对接环被内捕获手指和外捕获手指捕获并带回时,星箭对接环的凸起的台阶面22
‑
3与自适应支撑板17率先接触,自适应支撑板17沿着弹簧导向柱19向下移动,直至星箭对接环凹陷的底平面22
‑
4和固定支撑板21接触,这样可以保证星箭对接环凸起的台阶面完全压下去,同时保证固定支撑板21和星箭对接环凹陷的底平面22
‑
4的接触,增大接触面积;
36.如图12所示,本实施例中设置弹簧调整垫20的目的是为了实现自适应支撑板17初始预紧力的调整,当增加弹簧调整垫20的厚度时,自适应支撑板17的初始预紧力提高,当减小弹簧调整垫20的厚度时,自适应支撑板17的初始预紧力减小;
37.如图15所示,星箭对接环22在摆动机构的回转力和自适应支撑机构的初始预紧力的夹持下,保证了两个捕获手指对星箭对接环22的作用力一致性,提高空间机械手抓捕星箭对接环后的约束力矩和连接刚度。
38.如图2所示,所述的自适应支撑板17和固定支撑板21的上表面均设置有行程开关 24,当星箭对接环22的下底面的底部凸起的台阶面22
‑
3和凹陷的底平面22
‑
4均与自适应支撑板17和固定支撑板21接触时,驱动机构停止供电,机械手完成了星箭对接环22 的捕获工作。
39.如图1所示,本实施例中,所述的深沟球轴承组件8包括深沟球轴承8
‑
1、碟簧调整垫8
‑
2、碟簧8
‑
3和深沟球轴承端盖8
‑
4,上盖板1
‑
2的下端面中心处加工有轴承支撑孔,深沟球轴承8
‑
1安装在上盖板1
‑
2的轴承支撑孔内,碟簧8
‑
3通过碟簧调整垫8
‑
2设置在深沟球轴承8
‑
1的上端面上,深沟球轴承端盖8
‑
4通过螺钉连接在上盖板1
‑
2上,滚珠丝杠轴3的上部轴肩和深沟球轴承8
‑
1的内圈配合。如此设计,可有效地补偿因为温度变化导致滚珠丝杠轴变形产生的影响。深沟球轴承安装在上盖板的轴承支撑孔内,在深沟球轴承的外圈上安装碟簧调整垫8
‑
2碟簧调整垫,将碟簧安装于碟簧调整垫和深沟球轴承盖之间,深沟球轴承盖与上盖板通过螺钉连接,从而保证碟簧处于一定的压缩状态,形成一定的预紧力,从而形成对深沟球轴承的预紧。
40.如图1所示,本实施例中,所述的角接触球轴承组件9包括角接触球轴承座9
‑
1、两个角接触球轴承9
‑
2、角接触球轴承内隔圈9
‑
3、角接触球轴承外隔圈9
‑
4、轴承内锁紧螺母9
‑
5和轴承外锁紧螺母9
‑
6,角接触球轴承座9
‑
1通过螺钉固装在支撑外壳1
‑
1内部,两个角接触球轴承9
‑
2背对背设置在角接触球轴承座9
‑
1内,角接触球轴承外隔圈9
‑
4套在角接触球轴承内隔圈9
‑
3外,并设置在两个角接触球轴承9
‑
2之间,轴承外锁紧螺母9
‑
6 套在轴承内锁紧螺母9
‑
5外,且轴承外锁紧螺母9
‑
6螺接在角接触球轴承座9
‑
1的下端口处,并锁紧角接触球轴承的外圈,轴承内锁紧螺母9
‑
5螺接在滚珠丝杠轴3的外壁上,并锁紧角接触球轴承的内圈。两个角接触球轴承采用背对背的安装方式,可以提高滚珠丝杠轴的刚度,通过调整角接触球轴承内隔圈9
‑
3和角接触球轴承外隔圈9
‑
4的高度差可以调整角接触球轴承的安装预紧力。
41.如图1所示,本实施例中,所述的驱动机构2包括双绕组直流无刷电机2
‑
1和双绕组制动器2
‑
2,且分为主份和备份,所述的驱动器与控制器组件也由两组组成,分为主份和备份,驱动器与控制器组件的主份和直流无刷电机、制动器的主份绕组构成主份电气系统,驱动器与控制器组件的备份和直流无刷电机、制动器的备份绕组构成备份电气系统,主、备份
电气系统可提高自适应空间机械手的可靠性。
42.如图2所示,本实施例中,所述的快换接口组件23包括工具端法兰23
‑
1、绝缘隔热法兰23
‑
2、制动器保护外壳23
‑
3和电连接器插座23
‑
4,所述的制动器保护外壳23
‑
3通过绝缘隔热法兰23
‑
2连接在支撑外壳1
‑
1的底端,工具端法兰23
‑
1固装在制动器保护外壳 23
‑
3的下底面上,电连接器插座23
‑
4设置在工具端法兰23
‑
1的侧端面上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

