1.本实用新型属于无人机技术领域,具体涉及一种超续航氦气球无人机。
背景技术:
2.当前,无人机技术已是现有的成熟技术,特别是四轴螺旋桨的无人机应用更为广泛。但因受储能电池重量的限制,无人机飞行续航时间只能保持在半小时之内。由于飞行续航时间限制了无人机在一些固定空域的连续使用服务,如地震灾害的临时通讯中继及监测指挥,森林防火的监控,交通拥堵的调度监控,长时间的测绘及喷雾除霾等。另外,现有的无人机一旦事故失控,就会掉落下来,摔坏机器及造成伤人事故,无安全保障。
技术实现要素:
3.为了解决现有技术中的上述问题,本实用新型设计了一种超续航氦气球无人机,耗电较少,续航时间较长,安全性高,不会造成人身伤害,非常适合用于测绘和长时间勘察等领域。
4.为了解决现有技术中的上述问题,本实用新型采用了以下方案:
5.一种超续航氦气球无人机,包括机架及设置在所述机架上的四个螺旋桨,所述机架上方设置有梭形氦气球,所述机架的中心设置有动力电池、gps定位模块、飞行控制模块和遥控接收设备,所述机架的前部通过可倾转的自增稳云台搭载有相机;所述四个螺旋桨分为两组并左右对称设置,所述四个螺旋桨分别由相应的无刷电机驱动,所述无刷电机、gps定位模块、自增稳云台、遥控接收设备以及相机分别与所述飞行控制模块连接;所述梭形氦气球的尾部装有尾翼。
6.进一步,所述机架的下端还设置有同时起到天线作用的起落架。
7.进一步,所述无刷电机反向安装在所述机架上。
8.进一步,所述自增稳云台包括相机安装座、伺服电机,云台轴臂,减震设备和云台控制板,所述伺服电机与所述云台控制板连接驱动所述轴臂工作,所述云台控制板与所述飞行控制模块连接,所述相机设置在所述相机安装座上。
9.进一步,所述动力电池有两块,两块动力电池对称放置在所述机架上。
10.进一步,所述遥控接收设备与地面站通讯连接。
11.进一步,所述梭形氦气球的材料是pvc塑料。
12.该超续航氦气球无人机具有以下有益效果:
13.(1)本实用新型中,氦气球的浮力可以减少无人机动力系统的负担,动力系统只需输出较小的功率就可以使无人机起飞,较少无人机飞行的耗电,从而使续航时间成倍增加,使无人机能长时间的进行作业,如地震灾害的地形勘测,森林防火的监控,交通拥挤等,非常适合用于测绘和勘察等领域。
14.(2)本实用新型结构简单,实现方便,氦气球产生浮力,着陆平稳,因此无人机失去动力也会缓慢坠落,可以尽可能地提高无人机机上设备的坠落生存性,也可以避免无人机
坠落砸到有价值的物品和生物,造成财产安全损失,极大地提高了使用安全性。
附图说明
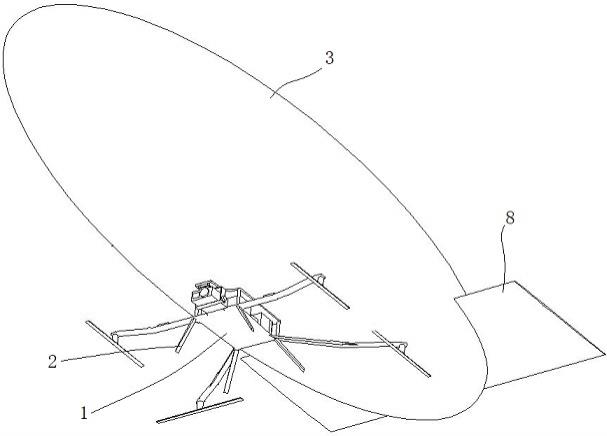
15.图1:本实用新型实施方式中超续航氦气球无人机的立体结构示意图;
16.图2:本实用新型实施方式中超续航氦气球无人机的俯视图(去掉氦气球);
17.图3:本实用新型实施方式中自增稳云台及相机的结构示意图。
18.附图标记说明:
19.1—机架;2—起落架;3—梭形氦气球;4—螺旋桨ⅰ;5—螺旋桨ⅱ;6—螺旋桨ⅲ;7—螺旋桨ⅳ;8—尾翼;9—相机;10—动力电池;11—遥控接收设备;12—飞行控制模块;13—gps定位模块;14—自增稳云台。
具体实施方式
20.下面结合附图,对本实用新型做进一步说明:
21.图1至图3示出了本实用新型一种超续航氦气球无人机的具体实施方式。图1至图2是本实施方式中超续航氦气球无人机的结构示意图;图3是本实施方式中自增稳云台及相机的结构示意图。
22.如图1至图2所示,本实施方式中的超续航氦气球无人机,包括机架1及设置在机架1上的四个螺旋桨,即螺旋桨ⅰ4、螺旋桨ⅱ5、螺旋桨ⅲ6、螺旋桨ⅳ7,机架1上方设置有梭形氦气球3,机架1的中心设置有动力电池10、gps定位模块13、飞行控制模块12和遥控接收设备11,机架1的前部通过可倾转的自增稳云台14搭载有相机9;所述四个螺旋桨分为两组并左右对称设置,所述四个螺旋桨分别由相应的无刷电机驱动,所述无刷电机、gps定位模块13、自增稳云台14、遥控接收设备11以及相机9分别与飞行控制模块12连接;梭形氦气球3的尾部装有尾翼8以提高飞行时的稳定性。
23.优选地,机架1的下端还设置有同时起到天线作用的起落架2,如图1所示。
24.优选地,所述无刷电机反向安装在机架1上。
25.优选地,自增稳云台14包括相机安装座、伺服电机,云台轴臂,减震设备和云台控制板,所述伺服电机与所述云台控制板连接驱动所述轴臂工作,所述云台控制板与飞行控制模块12连接,相机9设置在所述相机安装座上,如图3所示。
26.优选地,动力电池10有两块,两块动力电池10对称放置在机架1上,如图2所示。
27.本实施例中,遥控接收设备11与地面站通讯连接,接收地面站的指令。gps定位模块13可连接北斗与gps系统。
28.本实施例中,梭形氦气球3的材料是pvc塑料。
29.本实施方式中的超续航氦气球无人机,其主要工作原理为:四个螺旋桨,即螺旋桨ⅰ4、螺旋桨ⅱ5、螺旋桨ⅲ6、螺旋桨ⅳ7和四个无刷电机一一对应分别安装在机架1上,梭形氦气球3布置在机架1上方,梭形氦气球3与机架1紧固连接,飞行控制模块12控制四个无刷电机两正两反运动,可实现无人机的飞行;飞行控制模块12控制两个螺旋桨,即螺旋桨ⅰ4、螺旋桨ⅲ6转速上升,控制另外两个螺旋桨,即螺旋桨ⅱ5、螺旋桨ⅳ7转速下降,机身便在富余反扭矩的作用下绕z轴(上下向的轴)实现转动,实现无人机的自转飞行;飞行控制模块12控制螺旋桨ⅱ5与螺旋桨ⅳ7转速上升,保持螺旋桨ⅰ4、螺旋桨ⅲ6的转速不变,实现无人机
的向前运动,向后飞行与向前飞行正好相反;侧向飞行的工作原理与前后运动完全一样。除此之外,飞行控制模块12通过接收gps定位模块13的信息对无人机进行定位,自增稳云台14的转动电机转动从而使自增稳云台14保持相机9平稳。充有氦气的梭形的氦气球3产生一定的浮力,抵消无人机的重力,无刷电机就可以用较小的功率将整个无人机飞起。
30.本实用新型中,氦气球的浮力可以减少无人机动力系统的负担,动力系统只需输出较小的功率就可以使无人机起飞,较少无人机飞行的耗电,从而使续航时间成倍增加,使无人机能长时间的进行作业,如地震灾害的地形勘测,森林防火的监控,交通拥挤等,非常适合用于测绘和勘察等领域。
31.本实用新型结构简单,实现方便,氦气球产生浮力,着陆平稳,因此无人机失去动力也会缓慢坠落,可以尽可能地提高无人机机上设备的坠落生存性,也可以避免无人机坠落砸到有价值的物品和生物,造成财产安全损失,极大地提高了使用安全性。
32.上面结合附图对本实用新型进行了示例性的描述,显然本实用新型的实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围内。
技术特征:
1.一种超续航氦气球无人机,其特征在于,包括机架及设置在所述机架上的四个螺旋桨,所述机架上方设置有梭形氦气球,所述机架的中心设置有动力电池、gps定位模块、飞行控制模块和遥控接收设备,所述机架的前部通过可倾转的自增稳云台搭载有相机;所述四个螺旋桨分为两组并左右对称设置,所述四个螺旋桨分别由相应的无刷电机驱动,所述无刷电机、gps定位模块、自增稳云台、遥控接收设备以及相机分别与所述飞行控制模块连接;所述梭形氦气球的尾部装有尾翼。2.根据权利要求1所述的超续航氦气球无人机,其特征在于,所述机架的下端还设置有同时起到天线作用的起落架。3.根据权利要求1或2所述的超续航氦气球无人机,其特征在于,所述无刷电机反向安装在所述机架上。4.根据权利要求1或2所述的超续航氦气球无人机,其特征在于,所述自增稳云台包括相机安装座、伺服电机,云台轴臂,减震设备和云台控制板,所述伺服电机与所述云台控制板连接驱动所述轴臂工作,所述云台控制板与所述飞行控制模块连接,所述相机设置在所述相机安装座上。5.根据权利要求1或2所述的超续航氦气球无人机,其特征在于,所述动力电池有两块,两块动力电池对称放置在所述机架上。6.根据权利要求1或2所述的超续航氦气球无人机,其特征在于,所述遥控接收设备与地面站通讯连接。7.根据权利要求1或2所述的超续航氦气球无人机,其特征在于,所述梭形氦气球的材料是pvc塑料。
技术总结
本实用新型涉及一种超续航氦气球无人机,其特征在于,包括机架及设置在所述机架上的四个螺旋桨,所述机架上方设置有梭形氦气球,所述机架的中心设置有动力电池、GPS定位模块、飞行控制模块和遥控接收设备,所述机架的前部通过可倾转的自增稳云台搭载有相机;所述四个螺旋桨分为两组并左右对称设置,所述四个螺旋桨分别由相应的无刷电机驱动,所述无刷电机、GPS定位模块、自增稳云台、遥控接收设备以及相机分别与所述飞行控制模块连接;所述梭形氦气球的尾部装有尾翼。本实用新型耗电较少,续航时间长,智能化程度高,非常适合用于大面积的测绘,长时间侦测等领域。长时间侦测等领域。长时间侦测等领域。
技术研发人员:陈志文 苟成林 孙宇璐 牛子杰 张军 郭涛 高登禧
受保护的技术使用者:西北农林科技大学
技术研发日:2021.01.12
技术公布日:2021/9/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

