1.本发明属于航空模型技术领域。具体地,涉及一种电动航模的载重空投装置。
背景技术:
2.在中国航空航天模型锦标赛(cadc)中,有个比赛项目叫限距载重空投。限距载重空投要求参赛选手自行设计总重不超过1000克的飞机,在25米距离内离地起飞;飞机可装载水袋作为载重物,在指定高度投掷载重物到目标区域即可得分。每队最多派出两组参赛,每组参加两轮,两轮计算成绩总和。对于载重的要求是,载重越多,分数越高。在空投时,比赛场地设置一区直径8m,二区16m,三区40m的三个同心圆载重投放区,投中一区分数最高,二区次之,三区分数最低。
3.因而,在该项目中,要求在电动航模机身上设计载重空投装置,该装置既要挂载稳定,空气动力学特性优良;还要空投即时准确快速。
4.作为载重空投装置,军用飞机上一般具有功能类似的空投装置,用于装载导弹、炸弹和副油箱等。这类空投装置包括导轨式空投装置、弹射式空投装置和自由式空投装置。这些空投装置均为较为复杂的机电系统。例如,某种空投装置包括电磁铁组件、电缆、微动电门、支撑臂、连锁臂、连接板、挂钩、挡铁、爆炸控制盒、爆炸操纵臂、爆炸钩、地面开放臂、扇形臂、扇形轮等十几个功能单元组成。这类空投装置即使通过减小尺度和降低重量,使其缩减到合理的范围,也难以直接移植到电动航模上。
5.中国实用新型cn204452941u公开了一种用于航模载重空投的简易快速投放装置,包括机身、舵机、扇形摇臂、转轴、作动杆、粗套管、细套管、吊带和机翼,所述舵机、扇形摇臂、转轴、作动杆位于模型飞机机身内部,粗套管、细套管、吊带位于机身外部,所述舵机固定于机身,扇形摇臂安装于舵机输出轴上,所述转轴固定于机身两个侧面之间,作动杆被转轴穿过,置于机身底面,所述作动杆头部为半圆形挂钩,所述粗套管通过半圆形挂钩与作动杆咬合,所述细套管套入粗套管中,并用吊带将细套管固定于机身外底面,该航模载重空投的简易快速投放装置结构较为简单,结实耐用,成本较低,易于制作,能够实现快速投放,采用扇形摇臂作为投放机构的开关,提高了安全性与可靠性。该设计的不足之处是,舵机受力较大,而且受力方向和舵机主轴设计的主要承力方向不一致,有可能会导致舵机卡死。并且在装载时,需要在航模飞机的下部进行粗细套管对接和挂钩搭接等操作,不便于缩短装载时间。
6.因而,仍然需要寻找一种新的挂载稳定、空气动力学特性优良、空投即时准确快速的电动航模的载重空投装置。
技术实现要素:
7.本发明的目的在于提供一种新的电动航模的载重空投装置。所述载重空投装置不仅挂载稳定,空气动力学特性优良;而且空投即时准确快速。
8.为解决上述技术问题,本发明提供了下列技术方案:一种电动航模的载重空投装
置,包括两个相同的设置在电动航模机身上不同位置的载重空投组件;所述载重空投组件为板状结构;所述板状结构上部包括中空部分;所述中空部分的轴线与机身轴线重合,使得所述载重空投组件挂载在所述电动航模机身上;所述板状结构下部设置竖直悬臂,所述竖直悬臂可在垂直于板状结构的平面内旋转;其特征在于,前后两个载重空投组件的左右两侧相反,使得前面载重空投组件在垂直于板状结构的平面内向前旋转而后面载重空投组件在垂直于板状结构的平面内向后旋转。
9.根据本发明所述的载重空投装置,其特征在于,所述板状结构下方设置可旋转横杆和扇形摇臂;所述可旋转横杆插在固定连接在所述板状结构上的横杆底座中;所述可旋转横杆与所述扇形摇臂同轴设置,并且,所述扇形摇臂在旋转的同时可带动可旋转横杆转动; 所述板状结构一侧上固定有微型电磁铁组件和轻质弹簧;所述扇形摇臂外圆弧另一侧与轻质弹簧固定连接;所述可旋转横杆上固定设置竖直悬臂。
10.根据本发明所述的载重空投装置,其特征在于,所述扇形摇臂的开口角度为10
‑
170
°
。
11.根据本发明所述的载重空投装置,其特征在于,所述微型电磁铁组件包括导杆;所述导杆在断电时伸出,插入所述扇形摇臂外圆弧一侧的凹槽中;所述导杆顶部的形状与凹槽形状相匹配;所述导杆在断电时缩回,与所述扇形摇臂外圆弧一侧的凹槽脱离。
12.根据本发明所述的载重空投装置,其特征在于,所述可旋转横杆与所述扇形摇臂之间通过一个可旋转卸扣连接。
13.根据本发明所述的载重空投装置,其特征在于,所述竖直悬臂下端设置有开口,用于挂载重物。
14.根据本发明所述的载重空投装置,其特征在于,所述竖直悬臂位于所述电动航模的正下方。
15.根据本发明所述的载重空投装置,其特征在于,所述微型电磁铁组件通过单片机信号控制。
16.根据本发明所述的载重空投装置,其特征在于,除微型电磁铁组件和轻质弹簧之外,其余组件结构均由塑料制成。
17.根据本发明所述的载重空投装置,其特征在于,所述塑料选自聚苯乙烯硬泡沫塑料、聚氯乙烯硬泡沫塑料、聚氨脂硬泡沫塑料、聚苯乙烯硬泡沫塑料。
18.更进一步地,本发明还提供了一种电动航模的载重空投装置,所述载重空投装置包括两个相同的设置在电动航模机身上不同位置的载重空投组件;所述载重空投组件为板状结构;所述板状结构上部包括中空部分;所述中空部分的轴线与机身轴线重合,使得所述载重空投组件挂载在所述电动航模机身上;所述板状结构下部设置可旋转横杆和扇形摇臂;所述可旋转横杆插在固定连接在所述板状结构上的横杆底座中;所述可旋转横杆与所述扇形摇臂同轴设置,并且,所述扇形摇臂在旋转的同时可带动可旋转横杆转动;所述板状结构一侧上固定有微型电磁铁组件和轻质弹簧;所述扇形摇臂外圆弧另一侧与轻质弹簧固定连接;所述可旋转横杆上固定设置竖直悬臂;所述竖直悬臂可在垂直于板状结构的平面内旋转;前后两个载重空投组件的左右两侧相反,使得前面载重空投组件在垂直于板状结构的平面内向前旋转而后面载重空投组件在垂直于板状结构的平面内向后旋转。
19.有利地,所述扇形摇臂的开口角度为20
‑
150
°
;更优选地,所述扇形摇臂的开口角
度为30
‑
120
°
;以及最优选地,所述扇形摇臂的开口角度为45
‑
90
°
。
20.有利地,所述微型电磁铁组件包括导杆;所述导杆在断电时伸出,插入所述扇形摇臂外圆弧一侧的凹槽中;所述导杆顶部的形状与凹槽形状相匹配;所述导杆在断电时缩回,与所述扇形摇臂外圆弧一侧的凹槽脱离。
21.有利地,所述可旋转横杆与所述扇形摇臂之间通过一个可旋转卸扣连接。
22.有利地,所述竖直悬臂下端设置有开口,用于挂载重物。
23.有利地,所述竖直悬臂位于所述电动航模的正下方。
24.有利地,所述微型电磁铁组件通过单片机信号控制。
25.有利地,为了减轻重量,除微型电磁铁组件和轻质弹簧之外,其余组件结构均由塑料制成。塑料,包括,但不限于,聚苯乙烯硬泡沫塑料、聚氯乙烯硬泡沫塑料、聚氨脂硬泡沫塑料、聚苯乙烯硬泡沫塑料。
26.本发明的有益效果在于,与现有技术相比,本发明通过使用特定结构的载重空投装置不仅挂载稳定,空气动力学特性优良;而且空投即时准确快速。
附图说明
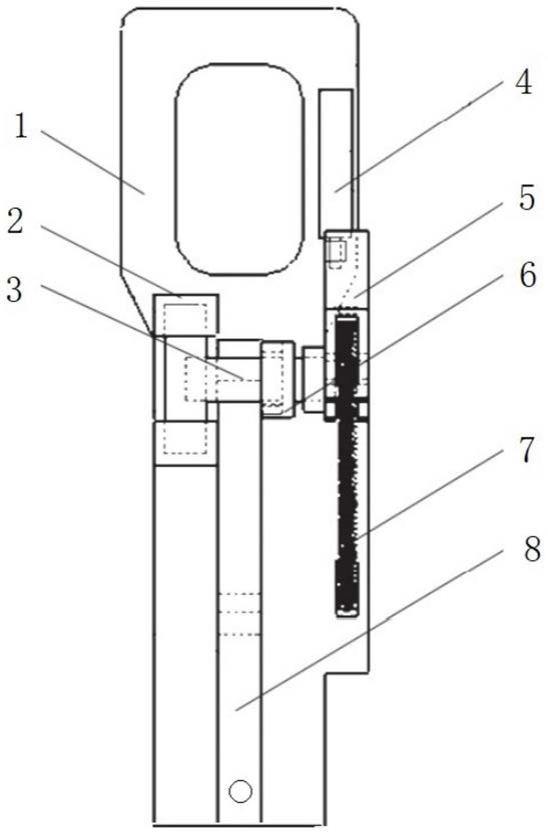
27.图1为根据本发明一个优选实施方式的电动航模的载重空投装置结构图(其中,1
‑
载重空投主板;2
‑
横杆底座;3
‑
可旋转横杆;4
‑
微型电磁铁组件;5
‑
扇形摇臂;6
‑
卸扣;7
‑
轻质弹簧;8
‑
竖直悬臂);图2为根据本发明一个优选实施方式的电动航模的载重空投装置的空投状态示意图(其中,4
‑
微型电磁铁组件;5
‑
扇形摇臂;7
‑
轻质弹簧)。
具体实施方式
28.在下文中,将参考附图对本发明的具体实施方式进行详细地描述,依照这些详细的描述,所属领域技术人员能够清楚地理解本发明,并能够实施本发明。在不违背本发明原理的情况下,各个不同的实施例中的特征可以进行组合以获得新的实施方式,或者替代某些实施方式中的某些特征,获得其它优选的实施方式。
29.如图1所示,依照本发明优选实施例构成的一种电动航模的载重空投装置,所述载重空投装置包括两个相同的设置在电动航模机身上不同位置的载重空投组件;所述载重空投组件包括载重空投主板1;所述载重空投主板1上部包括中空部分;所述中空部分的轴线与机身轴线重合,使得所述载重空投组件挂载在所述电动航模机身上;所述载重空投主板1下部设置可旋转横杆3和扇形摇臂5;所述可旋转横杆3插在固定连接在所述载重空投主板1上的横杆底座2中;所述可旋转横杆3与所述扇形摇臂5同轴设置,并且,所述扇形摇臂5在旋转的同时可带动可旋转横杆3转动;所述板状结构一侧上固定有微型电磁铁组件4和轻质弹簧7;所述扇形摇臂5外圆弧另一侧与轻质弹簧7固定连接;所述可旋转横杆3上固定设置竖直悬臂8;所述竖直悬臂8可在垂直于所述载重空投主板1的平面内旋转;前后两个载重空投组件的左右两侧相反,使得前面载重空投组件在垂直于所述载重空投主板1的平面内向前旋转而后面载重空投组件在垂直于所述载重空投主板1的平面内向后旋转。
30.在根据本发明的载重空投装置的一个优选实施方式中,所述扇形摇臂5的开口角度为60
°
。
31.在根据本发明的载重空投装置的一个优选实施方式中,所述微型电磁铁组件4包括导杆;所述导杆(未标识)在断电时伸出,插入所述扇形摇臂5外圆弧一侧的凹槽(未标识)中;所述导杆顶部的形状与凹槽形状相匹配;所述导杆在断电时缩回,与所述扇形摇臂外圆弧一侧的凹槽脱离。
32.在根据本发明的载重空投装置的一个优选实施方式中,所述可旋转横杆3与所述扇形摇臂5之间通过一个可旋转卸扣6连接。
33.在根据本发明的载重空投装置的一个优选实施方式中,所述竖直悬臂8下端设置有开口,用于挂载重物。
34.在根据本发明的载重空投装置的一个优选实施方式中,所述竖直悬臂8位于所述电动航模的正下方。
35.在根据本发明的载重空投装置的一个优选实施方式中,所述微型电磁铁组件4通过单片机信号控制。
36.在根据本发明的载重空投装置的一个优选实施方式中,除微型电磁铁组件4和轻质弹簧7之外,其余组件结构均由聚苯乙烯硬泡沫塑料制成。
37.图2为根据本发明一个优选实施方式的电动航模的载重空投装置的载重状态示意图。在该优选实施方式中,所述空投方法包括如下步骤:所述微型电磁铁组件4通电,导杆在断电时缩回,与所述扇形摇臂5外圆弧一侧的凹槽脱离;所述扇形摇臂5在轻质弹簧7作用下旋转,在旋转的同时带动可旋转卸扣6和可旋转横杆3转动;前后两个载重空投组件的可旋转横杆3分别带动前面载重空投组件在垂直于所述载重空投主板1的平面内向前旋转而后面载重空投组件在垂直于所述载重空投主板1的平面内向后旋转;重物与前后两个载重空投组件脱离,从而完成空投动作。
38.本发明的有益效果在于,与现有技术相比,本发明通过使用特定结构的载重空投装置不仅挂载稳定,空气动力学特性优良;而且空投即时准确快速。
39.尽管在上文中参考特定的实施例对本发明进行了描述,但是所属领域技术人员应当理解,在本发明公开的原理和范围内,可以针对本发明公开的配置和细节做出许多修改。本发明的保护范围由所附的权利要求来确定,并且权利要求意在涵盖权利要求中技术特征的等同物文字意义或范围所包含的全部修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

