1.本发明涉及一种控制装置、具备该控制装置的船舶以及船舶的控制方法。
背景技术:
2.为了抑制在航行期间和在海上的停船期间时船的横摇运动,存在一种具备稳定鳍的船。稳定鳍在航行期间检测出横摇,通过控制鳍角从而使鳍产生升力,通过升力力矩抑制船体的横摇运动。稳定鳍由控制装置控制。
3.例如,在专利文献1中,公开了以下内容:根据船的侧倾方向的倾斜(侧倾角)计算出横摇周期,基于该横摇周期控制稳定鳍。
4.另外,在专利文献2中,公开了以下内容:检测出船的俯仰角和侧倾角,计算出多个鳍应产生的升力的分配量来抑制该俯仰角和侧倾角,并分别控制多个鳍。
5.现有技术文献
6.专利文献
7.专利文献1:日本专利第6253205号公报
8.专利文献2:日本专利第2610761号公报
9.发明要解决的技术问题
10.然而,在上述的专利文献1和专利文献2所公开的发明中,并没有对于稳定鳍的启动和停止(收纳)的控制进行研究。因此,对于稳定鳍的启动和停止(收纳),存在由船舶的船员进行判断和操作的问题。
11.船员重视安全的航海,即使在海洋现象比较平静的情况下,也经常使用稳定鳍以防备突然的横摇。对此,船舶的管理方担心由于稳定鳍的使用而招致燃油经济性的劣化,希望将稳定鳍的使用抑制在所需的最小限度。
技术实现要素:
12.本发明是鉴于这样的情况而完成的,其目的在于提供一种能够控制稳定鳍的启动停止的控制装置、具备该控制装置的船舶以及船舶的控制方法。
13.为了解决上述的技术问题,本发明的控制装置、具备该控制装置的船舶以及船舶的控制方法采用以下的技术手段。
14.本发明的数个实施方式中的一个方式的控制装置是具备可收纳的两舷的稳定鳍的船舶的控制装置,从对所述船舶的姿势信息进行测量的信息测量装置获取所述姿势信息,所述姿势信息是所述稳定鳍的鳍动作角和所述船舶的船速中的任意一个,在两舷的所述稳定鳍动作的情况下,该控制装置进行如下控制:当判定为所述姿势信息小于第一规定值时,收纳任意一方的所述稳定鳍的鳍,在任意一方的所述稳定鳍动作的情况下,当判定为所述姿势信息小于第二规定值时,收纳两舷的所述稳定鳍的鳍。
15.根据本方式,在两舷的稳定鳍动作的情况下,当船舶的姿势信息小于第一规定值时,收纳任意一方的稳定鳍的鳍,在单舷的稳定鳍动作的情况下,当姿势信息小于第二规定
值时,收纳两舷的稳定鳍的鳍。由此,能够基于船舶的姿势信息判断是否收纳稳定鳍的鳍,并在必要的情况下自动进行收纳。是否收纳的判断基于定量的条件自动进行,因此船员不需要始终监视船舶的晃动,另外也不需要对于判断的熟练技术。
16.为了抑制船舶的横摇,稳定鳍将船舶的推进力转换为防止横摇的力,因此,稳定鳍的使用与船速降低相关,甚至招致船舶的主机的燃油经济性的劣化。
17.在本实施方式中,在基于船舶的姿势信息而判定晃动较小的情况下,收纳一方的稳定鳍的鳍而进行单舷运转,在晃动平息的情况下,收纳两舷的稳定鳍的鳍。根据本方式,通过仅在必要的情况下使用稳定鳍,在不必要的情况下收纳稳定鳍,从而能够抑制船舶的主机的燃耗,并有助于节约能源。在虽然有晃动,但不需要使用两舷的稳定鳍的情况下,通过仅使用单舷,能够同时实现减摇性能和节约能源。
18.能够通过稳定鳍的鳍动作角变小来判定不需要由稳定鳍产生的升力。鳍动作角被控制为在船舶的横摇较大的情况下增大,在横摇较小的情况下减小。在鳍动作角较小的情况下,船舶的横摇较小,使稳定鳍动作的必要性少,因此能够判断为可以收纳稳定鳍的鳍。
19.另外,在船舶1靠岸时等,当船速检测部检测出的船速小于规定的速度时自动收纳稳定鳍的鳍。
20.本发明的数个实施方式中的一个方式的控制装置是具备可收纳的两舷的稳定鳍的船舶的控制装置,从对所述船舶的姿势信息进行测量的信息测量装置获取所述姿势信息,所述姿势信息是所述稳定鳍的鳍动作角和所述船舶的横摇角中的任意一个,该控制装置进行如下控制:在两舷的所述稳定鳍的鳍被收纳的情况下,当判定为所述姿势信息大于第三规定值时,启动任意一方的所述稳定鳍的鳍,在任意一方的所述稳定鳍的鳍被收纳的情况下,当判定为所述姿势信息大于第四规定值时,启动两舷的所述稳定鳍。
21.根据本方式,在两舷的稳定鳍的鳍被收纳的情况下,当船舶的姿势信息大于第三规定值时,启动任意一方的稳定鳍,在单舷的稳定鳍的鳍被收纳的情况下,当姿势信息大于第四规定值时启动两舷的稳定鳍。由此,能够基于船舶的姿势信息判断是否启动稳定鳍,并且能够在必要的情况下自动启动稳定鳍。是否启动的判断基于定量的条件自动进行,因此,船员不需要始终监视船舶的晃动,另外也不需要对于判断的熟练技术。
22.为了抑制船舶的横摇,稳定鳍将船舶的推进力转换为防止横摇的力,因此,稳定鳍的使用与船速降低相关,甚至招致船舶的主机的燃油经济性的劣化。
23.在本方式中,在基于船舶的姿势信息而判定有晃动产生的情况下,启动一方的稳定鳍进行单舷运转,在单舷运转也无法平息晃动的情况下,启动两舷的稳定鳍。根据本方式,通过仅在必要的情况下使用稳定鳍,从而能够抑制船舶的主机的燃耗,并有助于节约能源。在虽然有晃动,但不需要使用两舷的稳定鳍的情况下,通过仅使用单舷,能够同时实现减摇性能和节约能源。
24.通过在船舶产生横摇,且船舶的横摇角变大来判定需要由稳定鳍产生的升力。另外,也能够通过计算出与需要升力的横摇角对应的鳍动作角,并且鳍动作角变大来进行判定。
25.在上述方式中,也可以是,该控制装置进行如下控制:在两舷的所述稳定鳍的鳍被收纳的情况下,当判断为所述姿势信息大于第三规定值,且所述船舶的船速超过规定的阈值时,启动任意一方的所述稳定鳍,在任意一方的所述稳定鳍的鳍被收纳的情况下,当判断
为所述姿势信息大于第四规定值,且所述船舶的船速超过规定的阈值时,启动两舷的所述稳定鳍。
26.根据本方式,由于船舶的横摇产生,因此需要减摇,并且能够判定为船速较快,能够由稳定鳍产生升力,因此,在船舶能够提供必要的升力的情况下,启动稳定鳍,由此能够有效且适当地利用稳定鳍的减摇性能。
27.在上述方式中,也可以是,具备:位置信息检测部,该位置信息检测部对所述船舶的位置信息进行检测;气象信息检测部,该气象信息检测部基于所述位置信息确定所述船舶航行的海域,并对所述海域的气象信息进行检测,所述气象信息包含所述海域的波向信息或风向信息,在使任意一方的所述稳定鳍动作而进行单舷运转的情况下,基于所述波向信息或所述风向信息进行控制,以使得不承受波浪的一侧或下风侧的所述稳定鳍动作。
28.根据本方式,在使任意一方的稳定鳍动作而进行单舷运转的情况下,基于波向信息或风向信息决定动作的稳定鳍,因此,能够进行如下控制:在基于波向信息的情况下使不承受波浪的一侧的稳定鳍动作,在基于风向信息的情况下使下风侧的稳定鳍动作。
29.在使任意一方的稳定鳍动作的情况下,较好的是,所使用的稳定鳍不受到因波浪导致的流体运动的影响。这是因为鳍承受波浪拍打时,不能发挥出设想的升力。因此,通过使不承受波浪的一侧或下风侧的稳定鳍动作,从而能够选择难以受到因波浪导致的流体运动的影响、能够发挥设想的升力的稳定鳍并使其动作。
30.在上述方式中,也可以是,具备行进方向检测部,该行进方向检测部对所述船舶的行进方向进行检测,在使任意一方的所述稳定鳍动作而进行单舷运转的情况下,基于所述行进方向和所述位置信息进行控制,以使得沿岸侧和海面侧中的沿岸侧的所述稳定鳍动作。
31.根据本方式,在使任意一方的稳定鳍动作并进行单舷运转的情况下,基于行进方向和位置信息决定动作的稳定鳍,因此,能够根据行进方向和位置信息掌握与沿岸(陆地)的位置关系,并进行控制以使得沿岸侧和海面侧中的沿岸侧的稳定鳍动作。
32.例如,在日本近海航行时,波浪从海面向沿岸涌来。该波浪可能对船体晃动产生影响。例如,当在太平洋航行且行进方向为东北时,经常从船舶的右舷承受波浪,当行进方向为相反的西南时,经常从船舶的左舷承受波浪。另一方面,当在日本海航行的情况下,为相反的倾向。
33.因此,当在太平洋航行且行进方向为东北时,优先使船舶的左舷侧的稳定鳍动作,当行进方向为西南时,优先使船舶的右舷侧的稳定鳍动作,由此,能够抑制波浪的影响,并有效地发挥由稳定鳍产生的升力。
34.在上述方式中,也可以是,在使所述稳定鳍动作的电机设置对该电机的动作时间进行测量的计时器,在使任意一方的所述稳定鳍动作而进行单舷运转的情况下,进行控制以使得所述动作时间较短的所述稳定鳍动作。
35.根据本方式,在使任意一方的稳定鳍动作而进行单舷运转的情况下,进行控制,以使得计时器测量出的动作时间较短的稳定鳍进行动作,因此,能够抑制稳定鳍的运转时间的偏倚,使各稳定鳍的运转时间均等。
36.本发明的数个实施方式中的一个方式的船舶具备上述的控制装置。
37.本发明的数个实施方式中的一个方式的船舶的控制方法是具备可收纳的两舷的
稳定鳍的船舶的控制方法,具有:获取所述船舶的姿势信息的步骤,所述船舶的姿势信息是所述稳定鳍的鳍动作角和所述船舶的船速中的任意一个;单舷收纳步骤,在两舷的所述稳定鳍动作的情况下,当判定为所述姿势信息小于第一规定值时,收纳任意一方的所述稳定鳍的鳍;以及两舷收纳步骤,在通过所述单舷收纳步骤而任意一方的所述稳定鳍动作的情况下,当判定为所述姿势信息小于第二规定值时,收纳两舷的所述稳定鳍的鳍。
38.本发明的数个实施方式中的一个方式的船舶的控制方法是具备可收纳的两舷的稳定鳍的船舶的控制方法,具有:获取所述船舶的姿势信息的步骤,所述船舶的姿势信息是所述稳定鳍的鳍动作角和所述船舶的横摇角中的任意一个;单舷启动步骤,在两舷的所述稳定鳍的鳍被收纳的情况下,当判定为所述姿势信息大于第三规定值时,启动任意一方的所述稳定鳍;以及两舷启动步骤,在通过所述单舷启动步骤而任意一方的所述稳定鳍的鳍被收纳的情况下,当判定为所述姿势信息大于第四规定值时,启动两舷的所述稳定鳍。
39.发明效果
40.根据本发明,基于船舶的姿势信息自动地控制稳定鳍的启动、停止,因此,在不需要稳定鳍的情况下收纳稳定鳍的鳍,减少推进阻力,从而能够抑制主机的燃耗,并有助于节约能源。
附图说明
41.图1是船舶的俯视图。
42.图2是船舶的主视图。
43.图3是表示左舷的稳定鳍的收纳状态的侧视图。
44.图4是表示左舷的稳定鳍的动作状态的立体图。
45.图5是表示左舷的稳定鳍的鳍和襟翼的非转动状态的侧视图。
46.图6是表示左舷的稳定鳍的鳍和襟翼的转动状态的侧视图。
47.图7是表示左舷的稳定鳍的鳍和襟翼的转动状态的侧视图。
48.图8是表示数个实施方式的控制装置的一个方式的框图。
49.图9是表示数个实施方式的控制装置的稳定鳍动作时的控制的一个方式的流程图。
50.图10是表示数个实施方式的控制装置的稳定鳍停止时的控制的一个方式的流程图。
51.图11是表示沿岸航行的船舶的一例的俯视图。
具体实施方式
52.以下,参照附图,对本发明的数个实施方式的控制装置、具备该控制装置的船舶以及船舶的控制方法的各实施方式进行说明。
53.在图1中,以俯视图表示具备本发明的数个实施方式的控制装置的船舶的一个方式。
54.在图2中,以主视图表示船舶的一个方式。
55.如图1所示,船舶1在右舷和左舷具备稳定鳍10。
56.如图2所示,稳定鳍10在船舶1的船底弯曲部被配置为向斜下方突出。
57.在图3中,显示了表示具备本发明的数个实施方式的控制装置的船舶的左舷的稳定鳍的收纳状态的侧视图,在图4中,显示了表示左舷的稳定鳍的动作状态的立体图。
58.稳定鳍10具有鳍轴(未图示),稳定鳍10的鳍12能够以鳍轴为中心转动。
59.如图3所示,鳍12在收纳状态的情况下,被收纳于船舶1的鳍收纳部5。鳍收纳部5向船舶1的内部侧凹陷,以使得能够将鳍12整体收纳于船舶1内。右舷的鳍12也被同样地收纳。鳍12通过被收纳于鳍收纳部5,从而不受到水的阻力。
60.另外如图4所示,鳍12在动作状态的情况下,从鳍收纳部5向船首方向转动,从船舶1伸出。右舷的鳍12也同样地动作。在图1和图2中,表示右舷和左舷的稳定鳍10动作的状态。
61.在图5中,显示了表示左舷的稳定鳍的鳍主体和襟翼的非转动状态的侧视图,在图6和图7中,分别显示了表示稳定鳍的鳍主体和襟翼转动的状态的侧视图。图5至图7的各箭头表示水流的流动方向。
62.如图5所示,鳍12具备鳍主体16和襟翼14。鳍主体16能够以鳍轴为中心转动,襟翼14能够与鳍主体16独立地转动。鳍轴设置于图5的单点划线相交的交点。在鳍主体16和襟翼14不转动而相对于水流平行的情况下,升力几乎不产生。
63.当鳍主体16和襟翼14如图6和图7那样转动时,由于鳍12的角度(鳍动作角)而产生与通过船舶1的行进而产生的水流相应的升力,防止船体的横摇。在鳍主体16转动的情况下,襟翼14也可以不转动。襟翼14用于对由鳍主体16产生的升力进行微调整的情况。
64.通过稳定鳍10而产生的升力的大小基于鳍动作角的大小和伴随船舶1的行进的水流的速度而求出。鳍动作角由控制装置40的后述的稳定鳍控制部41控制。在船舶1的横摇较大的情况下控制为鳍动作角增大,另外在横摇较小的情况下控制为鳍动作角减小。
65.另外,稳定鳍10使用因船舶1的行进而产生的水流来产生升力。作为稳定鳍10的性质,在船舶1未达到规定的速度的情况下,不能获得横摇衰减效果。因此,在后述的船速检测部31所检测出的船速小于规定的速度的情况下,停止稳定鳍10并收纳鳍12。
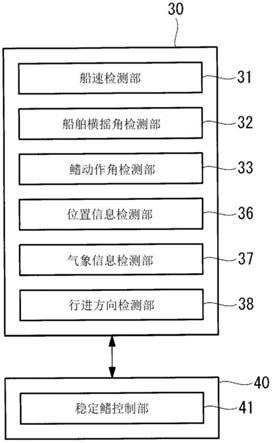
66.在图8中,显示了表示数个实施方式的控制装置的一个方式的框图。
67.信息测量装置30具备船速检测部31、船舶横摇角检测部32以及鳍动作角检测部33。另外,也可以具备位置信息检测部36、气象信息检测部37以及行进方向检测部38。
68.船速检测部31通过例如电磁计程仪、多普勒计程仪等检测船舶1的速度(船速)。
69.船舶横摇角检测部32基于例如设于船舶1的加速度传感器的检测结果,对表示由横摇而导致的船舶1的姿势的变化的横摇角(侧倾角)进行检测。
70.鳍动作角检测部33检测稳定鳍10的转动角度(倾斜)。
71.控制装置40具备稳定鳍控制部41。
72.稳定鳍控制部41获取信息测量装置30所检测出的船舶1的各信息,基于这些信息进行稳定鳍10的控制。
73.控制装置40例如由cpu(central processing unit:中央处理器)、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)以及计算机可读取的非暂时性的存储介质等构成。而且,作为一例,用于实现各种功能的一系列的处理以程序的形式被存储于存储介质等,通过cpu将该程序读取至ram等,并执行信息的加工、运算处理,由此实现各种功能。另外,程序也可以应用预先安装于rom、其他存储介质的形式;以存储于计算机可读取的存储介质的状态被提供的形式;经由有线或无线的通信设备发布的形
式等。计算机可读取的存储介质是指磁盘、光盘、cd
‑
rom、dvd
‑
rom、半导体存储器等。
74.在图9中,显示了表示数个实施方式的控制装置的稳定鳍动作时的控制的一个方式的流程图。
75.为了防止船舶1的晃动,两舷的稳定鳍10正在动作(s101)。
76.控制装置40对于从信息测量装置30获取的姿势信息中的鳍动作角检测部33所检测出的稳定鳍10的鳍动作角是否小于第一规定值进行判定(s102)。这里的第一规定值是从停止单舷的稳定鳍10并收纳鳍12而仅通过另一方的单舷的稳定鳍10来防止乘客摔倒、货物倒塌、晕船等观点出发而与将船舶1的横摇抑制在乘员的容许范围的横摇角对应的鳍动作角。第一规定值可以作为初始设定值被设定于控制装置40,也可以由船舶1的船员进行设定变更。
77.在步骤s102中,在判定为鳍动作角在第一规定值以上的情况下,控制装置40继续监视鳍动作角,并进行鳍动作角与第一规定值的判定。
78.另一方面,在步骤s102中,在判定为鳍动作角小于第一规定值的情况下,稳定鳍控制部41进行控制,使单舷的稳定鳍10停止并收纳鳍12(s103)。
79.当单舷的稳定鳍10的鳍12被收纳时,控制装置40待机规定时间,以使得仅通过单舷的稳定鳍10的动作下的运转稳定(s104)。
80.接着,控制装置40对从信息测量装置30获取的姿势信息中的鳍动作角检测部33所检测出的稳定鳍10的鳍动作角是否小于第二规定值进行判定(s105)。这里的第二规定值是从即使停止两舷的稳定鳍10并收纳鳍12也防止乘客的摔倒、货物倒塌、晕船等的观点出发而与将船舶1的横摇抑制在乘员的容许范围的横摇角对应的鳍动作角。第二规定值可以作为初始设定值被设定于控制装置40,也可以由船舶1的船员进行设定变更。另外,第一规定值和第二规定值可以设定为彼此独立的值,也可以是相同的值,另外也可以是不同的值。
81.在步骤s105中,在判定为鳍动作角在第二规定值以上的情况下,控制装置40继续监视鳍动作角,并进行鳍动作角与第二规定值的判定。
82.另一方面,在步骤s105中,在判定为鳍动作角小于第二规定值的情况下,稳定鳍控制部41进行控制,使动作中的单舷的稳定鳍10停止并收纳鳍12,即,使两舷的稳定鳍10停止并收纳鳍12(s106)。
83.在本实施方式中,在稳定鳍10启动时的控制中,在有无启动的判定中使用了鳍动作角,但也可以使用船速检测部31所检测出的船舶1的船速来代替鳍动作角。
84.在图10中,显示了表示数个实施方式的控制装置的稳定鳍停止时的控制的一个方式的流程图。
85.船舶1的两舷的稳定鳍10停止,并且鳍12被收纳(s201)。
86.控制装置40对从信息测量装置30获取的姿势信息中的船舶横摇角检测部32所检测出的船舶1的横摇角是否大于第三规定值进行判定(s202)。这里的第三规定值是指用于判断需要启动单舷的稳定鳍10并仅通过单舷的稳定鳍10而将船舶1的横摇抑制在基于防止乘客的摔倒、货物倒塌、晕船等观点的乘员的容许范围的横摇角的阈值。第三规定值可以作为初始设定值被设定于控制装置40,也可以由船舶1的船员进行设定变更。
87.在步骤s202中,在判定为横摇角在第三规定值以下的情况下,继续监视横摇角,并进行横摇角与第三规定值的判定。
88.另一方面,在步骤s202中,在判定为横摇角大于第三规定值的情况下,稳定鳍控制部41进行控制而启动单舷的稳定鳍10(s203)。
89.当单舷的稳定鳍10启动并动作时,控制装置40待机规定时间,以使得仅通过单舷的稳定鳍10的动作下的运转稳定(s204)。
90.接着,控制装置40对从信息测量装置30获取的姿势信息中的船舶横摇角检测部32所检测出的船舶1的横摇角是否大于第四规定值进行判定(s205)。这里的第四规定值是用于判断需要启动两舷的稳定鳍10来将船舶1的横摇抑制在基于防止乘客的摔倒、货物倒塌、晕船等观点的乘员的容许范围的横摇角的阈值。第四规定值可以作为初始设定值被设定于控制装置40,也可以由船舶1的船员进行设定变更。另外,第三规定值和第四规定值可以设定为彼此独立的值,也可以是相同的值,另外也可以是不同的值。
91.在步骤s205中,在判定为横摇角在第四规定值以下的情况下,控制装置40继续监视横摇角,并进行横摇角与第四规定值的判定。
92.另一方面,在步骤s205中,在判定为横摇角大于第四规定值的情况下,稳定鳍控制部41进行控制而启动停止中的单舷的稳定鳍10,即启动两舷的稳定鳍10并使两舷的稳定鳍10动作(s206)。
93.在本实施方式中,在稳定鳍10停止时的控制中,在有无启动的判定中使用了横摇角,但也可以计算与横摇角对应的鳍动作角,根据鳍动作角的值进行有无启动的判定。
94.另外,除了横摇角或鳍动作角以外,也可以使用船速。也可以是,在横摇角或计算出的鳍动作角大于第三规定值且船速超过规定的阈值的情况下,判定为需要启动单舷的稳定鳍10。另外,也可以是,在横摇角或计算出的鳍动作角大于第四规定值且船速超过规定的阈值的情况下,判定为需要启动两舷的稳定鳍10。
95.在图9的步骤s103和图10的步骤s203中,在设定为仅通过单舷的稳定鳍10的运转的情况下,稳定鳍控制部41优先选择右舷或左舷中的任意一个稳定鳍10,或通过切换船员设定的开关来进行选择。
96.稳定鳍控制部41也可以如下所述地选择优先选择的稳定鳍10。
97.如图8所示,信息测量装置30具备位置信息检测部36和气象信息检测部37。
98.位置信息检测部36对船舶1航行的位置信息进行检测。使用例如gps(全球定位系统)检测位置信息。
99.气象信息检测部37基于位置信息检测部36检测出的位置信息确定船舶1航行的海域,并对该海域的气象信息进行检测。气象信息可以采用从世界气象机构的预报数据获取、通过设置于信息测量装置30的传感器等获取等任意方法。气象信息包含船舶1航行的海域的波向信息(波浪的朝向的信息)或风向信息(风的朝向的信息)。
100.稳定鳍控制部41从位置信息检测部36获取船舶1的位置信息,从气象信息检测部37获取气象信息。稳定鳍控制部41基于获取的气象信息的波向信息确定船舶1的不承受波浪的一侧,并优先选择不承受波浪的一侧的稳定鳍10。
101.另外,稳定鳍控制部41基于风向信息确定船舶1的下风侧,并优先选择下风侧的稳定鳍10。
102.在使任意一方的稳定鳍10动作并进行单舷运转的情况下,基于波向信息或风向信息确定进行动作的稳定鳍10,因此,能够在基于波向信息的情况下控制不承受波浪的一侧
稳定鳍10动作,在基于风向信息的情况下控制下风侧的稳定鳍10动作。
103.在使任意一方的稳定鳍10动作的情况下,较好的是,所使用的稳定鳍10不承受波浪导致的流体运动的影响。这是因为鳍12承受波浪拍打时,不能产生设想的升力。因此,通过使不承受波浪的一侧或下风侧的稳定鳍10动作,从而能够选择难以受到因波浪导致的流体运动的影响、能够发挥设想的升力的稳定鳍10并使其动作。
104.更进一步地,例如船舶1在日本近海航行的情况下,也可以如下所述地选择优先选择的稳定鳍10。
105.在图11中,以俯视图表示沿岸航行的船舶的一例。
106.例如船舶1在日本近海航行的情况下,由于波浪从海面向沿岸涌来,因此可知船舶1的海面侧经常承受波浪。
107.在图11中,船舶1沿着虚线方向沿岸(陆地)(斜纹部分)航行。波浪沿着黑箭头的方向从海面向沿岸涌来。
108.如图11所示,船舶1的右舷侧为海面,左舷侧为沿岸。另外,当将图11中的上方向设为北方时,船舶1的行进方向为大致北方。
109.如图8所示,信息测量装置30具备行进方向检测部38。
110.行进方向检测部38对船舶1航行的行进方向进行检测。例如使用装备于船舶1的陀螺罗盘检测行进方向。
111.稳定鳍控制部41从位置信息检测部36获取船舶1的位置信息,并从行进方向检测部38获取行进方向。稳定鳍控制部41基于获取的位置信息掌握与沿岸的位置关系以及波浪的朝向,根据行进方向判断哪个舷在沿岸侧。在图11的情况下,左舷侧为沿岸侧,因此优先选择左舷侧的稳定鳍10。
112.例如,在船舶1的行进方向为与图11相反的朝南的情况下,优先选择作为沿岸侧的右舷侧的稳定鳍10。另外,在船舶1的右舷侧为沿岸,船舶1的行进方向朝北的情况下,优先选择作为沿岸侧的右舷侧的稳定鳍10。
113.由此,在使任意一方的稳定鳍10动作而进行单舷运转的情况下,基于行进方向和位置信息确定动作的稳定鳍10,因此,能够根据行进方向和位置信息掌握与沿岸(陆地)的位置关系,并进行控制以使沿岸侧和海面侧中的沿岸侧的稳定鳍10动作。
114.例如,在日本近海航行时,波浪从海面向沿岸涌来。该波浪可能对船体晃动产生影响。例如,在太平洋航行且行进方向为东北时,经常从船舶1的右舷承受波浪,当行进方向为相反的西南时,经常从船舶1的左舷承受波浪。另一方面,当在日本海航行的情况下,为相反的倾向。
115.因此,当在太平洋航行且行进方向为东北时,优先使船舶1的左舷侧的稳定鳍10动作,当行进方向为西南时,优先使船舶1的右舷侧的稳定鳍10动作,由此,能够抑制波浪的影响,并有效地由稳定鳍1产生升力。
116.另外,稳定鳍控制部41也可以如下所述地选择优先选择的稳定鳍10。
117.使稳定鳍10动作的电机(未图示)的启动器盘(未图示)设置于左右舷的稳定鳍10的附近。通过启动器盘控制电机的启动停止。
118.将能够测量电机的运转时间的计时器(hour meter)设置于启动器盘。由此,稳定鳍控制部41能够获取左右舷的各电机的运转时间。稳定鳍控制部41比较获取的左右舷的电
机的运转时间,并优先选择运转时间较短的稳定鳍10。
119.由此,在使任意一方的稳定鳍10动作而进行单舷运转的情况下,进行控制,以使得计时器测量出的动作时间较短的稳定鳍10进行动作,因此,能够抑制稳定鳍10的运转时间的偏差,使各稳定鳍10的运转时间均等。
120.如以上说明那样,根据本实施方式的控制装置、具备该控制装置的船舶以及船舶的控制方法,可起到以下的作用效果。
121.在两舷的稳定鳍10动作的情况下,当船舶1的姿势信息小于第一规定值时,收纳任意一方的稳定鳍10的鳍12,在单舷的稳定鳍10动作的情况下,当姿势信息小于第二规定值时,收纳两舷的稳定鳍10的鳍12,因此,能够基于船舶1的姿势信息判断是否收纳稳定鳍10的鳍12,并在必要的情况下自动进行收纳。是否收纳的判断基于定量的条件自动进行,因此船员不需要始终监视船舶1的晃动,另外也不需要对于判断的熟练技术。
122.为了抑制船舶1的横摇,稳定鳍10将船舶1的推进力转换为防止横摇的力,因此,稳定鳍10的使用与船速降低相关,甚至招致船舶1的主机的燃油经济性的劣化。
123.在本实施方式中,在基于船舶1的姿势信息而判定晃动较小的情况下,收纳一方而进行单舷运转,在晃动平息的情况下,收纳两舷的稳定鳍10的鳍12,因此,通过仅在必要的情况下使用稳定鳍10,在不必要的情况下收纳稳定鳍10,从而能够抑制船舶1的主机的燃耗,并有助于节约能源。在虽然有晃动,但不需要使用两舷的稳定鳍10的情况下,通过仅使用单舷,能够同时实现减摇性能和节约能源。
124.能够通过稳定鳍10的鳍动作角变小来判定变得不需要由稳定鳍10产生的升力。鳍动作角被控制为在船舶1的横摇较大的情况下增大,在横摇较小的情况下减小。在鳍动作角较小的情况下,船舶1的横摇较小,使稳定鳍10动作的需要较少,因此能够判断为可以收纳稳定鳍10的鳍12。
125.另外,在船舶1靠岸时等,当船速检测部31检测出的船速小于规定的速度时自动收纳稳定鳍10的鳍12。
126.另外,根据本实施方式,在两舷的稳定鳍10的鳍12被收纳的情况下,当船舶1的姿势信息大于第三规定值时,启动任意一方的稳定鳍10,在单舷的稳定鳍10的鳍12被收纳的情况下,当姿势信息大于第四规定值时启动两舷的稳定鳍10。由此,能够基于船舶1的姿势信息判断是否启动稳定鳍10,并且能够在必要的情况下自动启动稳定鳍10。是否启动的判断基于定量的条件自动进行,因此,船员不需要始终监视船舶1的晃动,另外也不需要对于判断的熟练技术。
127.为了抑制船舶1的横摇,稳定鳍10将船舶1的推进力转换为防止横摇的力,因此,稳定鳍10的使用与船速降低相关,甚至招致船舶1的主机的燃油经济性的劣化。
128.在本实施方式中,在基于船舶1的姿势信息而判定有晃动产生的情况下,启动一方的稳定鳍10进行单舷运转,在单舷运转也无法平息晃动的情况下,启动两舷的稳定鳍10。由此,通过仅在必要的情况下使用稳定鳍10,从而能够抑制船舶1的主机的燃耗,并有助于节约能源。在虽然有晃动,但不需要使用两舷的稳定鳍10的情况下,通过仅使用单舷,能够同时实现减摇性能和节约能源。
129.能够通过在船舶1产生横摇,并且船舶1的横摇角变大来判定需要由稳定鳍10产生的升力。另外,也能够通过计算出与需要升力的横摇角对应的鳍动作角且鳍动作角变大来
进行判定。
130.另外,根据本实施方式,由于船舶1的横摇产生,因此需要减摇,并且能够判定为船速较快,能够由稳定鳍10产生升力,因此,在船舶1能够提供必要的升力的情况下,启动稳定鳍10,由此能够有效且适当地利用基于稳定鳍10的减摇性能。
131.符号说明
132.1 船舶
133.5 鳍收纳部
134.10 稳定鳍
135.12 鳍
136.16 鳍主体
137.14 襟翼
138.30 信息测量装置
139.40 控制装置
140.41 稳定鳍控制部
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

