1.本实用新型涉及海洋装备技术领域,具体地说是涉及一种角度可调节的导流罩总成及潜航器。
背景技术:
2.目前在海洋水下勘探中广泛应用潜航器作为运载平台,在潜航器上设置机械手、载物舱等。比如,通过机械手抓取取样工具完成对海洋地质的取样,将样品放入载物舱上浮带回至科考船。但是,目前的潜航器一般不设置导流罩,如此其动力损耗较大,并且其推进方向不能灵活调节,导致潜航器的机动性较差。
技术实现要素:
3.本实用新型的目的在于提供一种角度可调节的导流罩总成及潜航器,使潜航器的推进方向可以灵活调节,以提高潜航器的机动性。
4.为了达到上述目的,本实用新型所采用的技术解决方案如下:
5.一种角度可调节的导流罩总成,包括支撑套筒、第一左滑杆、第一右滑杆、左齿条、右齿条、驱动齿轮、伺服电机、左摆动杆、右摆动杆、导流罩和螺旋桨;
6.支撑套筒的前端左侧设置第一左滑套,支撑套筒的前端右侧设置第一右滑套,第一左滑杆滑动连接于第一左滑套内,第一右滑杆滑动连接于第一右滑套内;
7.第一左滑杆的一端装配连接左齿条的一端,第一右滑杆的一端装配连接右齿条的一端;
8.所述驱动齿轮位于左齿条和右齿条之间,驱动齿轮的两侧分别啮合连接左齿条和右齿条,所述伺服电机的输出转轴连接驱动齿轮;
9.第一左滑杆的另一端铰接左摆动杆的一端,左摆动杆的另一端铰接导流罩的左侧位置,第一右滑杆的另一端铰接右摆动杆的一端,右摆动杆的另一端铰接导流罩的右侧位置;
10.所述导流罩内设置螺旋桨。
11.优选的,支撑套筒的后端左侧设置第二左滑套,支撑套筒的后端右侧设置第二右滑套;第二左滑套内滑动连接有第二左滑杆,第二右滑套内滑动连接有第二右滑杆;第二左滑杆的一端装配连接左齿条的另一端,第二右滑杆的一端装配连接右齿条的另一端。
12.优选的,第二左滑杆的中间位置转动连接有与第二左滑套内壁接触的滚轮,第二右滑杆的中间位置转动连接有与第二右滑套内壁接触的滚轮。
13.优选的,第一左滑杆的中间位置转动连接有与第一左滑套内壁接触的滚轮,第一右滑杆的中间位置转动连接有与第一右滑套内壁接触的滚轮。
14.优选的,所述导流罩的左侧位置设置有左撑杆,导流罩的右侧位置设置有右撑杆,左摆动杆的另一端铰接左撑杆的末端,右摆动杆的另一端铰接右撑杆的末端。
15.本实用新型还提供一种潜航器,潜航器上设置上述的角度可调节的导流罩总成。
16.优选的,所述角度可调节的导流罩总成设置于潜航器后端的中间位置。
17.优选的,所述角度可调节的导流罩总成设置于潜航器后端的左右两侧位置。
18.本实用新型的有益技术效果是:
19.本实用新型的角度可调节的导流罩总成,结构简单,成本较低,设计巧妙,将其应用于潜航器,通过将螺旋桨设置于导流罩内,可以减少其动力损耗,由伺服电机带动驱动齿轮转动,使左齿条、右齿条向相反的方向移动,进而经左摆动杆、右摆动杆带动导流罩向左或向右摆动,以改变导流罩的摆动方向,以灵活调节潜航器的推进方向,提高潜航器的机动性。
附图说明
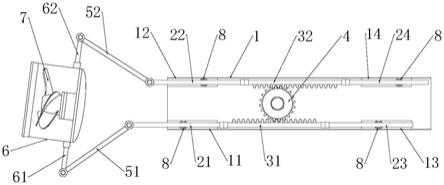
20.图1为本实用新型实施例1角度可调节的导流罩总成的结构示意图;
21.图2为本实用新型实施例1潜航器的俯视图;
22.图3为本实用新型实施例2潜航器的俯视图。
具体实施方式
23.为使本实用新型的目的、技术方案和有益效果更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型进一步详细说明。本实用新型某些实施例于后方将参照所附附图做更全面性地描述,其中一些但并非全部的实施例将被示出。实际上,本实用新型的各种实施例可以许多不同形式实现,而不应被解释为限于此数所阐述的实施例;相对地,提供这些实施例使得本实用新型满足适用的法律要求。
24.在本实用新型的描述中,需要说明的是,术语“内”、“外”、“上”、“下”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
25.实施例1:
26.在本实用新型实施例中,提供一种角度可调节的导流罩总成,请参考图1、图2所示。
27.一种角度可调节的导流罩总成,包括支撑套筒1、第一左滑杆21、第一右滑杆22、第二左滑杆23、第二右滑杆24、左齿条31、右齿条32、驱动齿轮4、伺服电机、左摆动杆51、右摆动杆52、导流罩6和螺旋桨7等。
28.支撑套筒1的前端左侧设置第一左滑套11,支撑套筒1的前端右侧设置第一右滑套12,第一左滑杆21滑动连接于第一左滑套11内,第一右滑杆22滑动连接于第一右滑套12内。第一左滑杆21可以相对于第一左滑套11直线往复运动,第一右滑杆22可以相对于第一右滑套12直线往复运动。
29.第一左滑杆21的一端装配连接左齿条31的一端,第一右滑杆22的一端装配连接右齿条32的一端。驱动齿轮4位于左齿条31和右齿条32之间,驱动齿轮4的两侧分别啮合连接左齿条31和右齿条32,伺服电机的输出转轴经键连接驱动齿轮4。伺服电机的输出转轴转动,带动驱动齿轮4转动,进而带动左齿条31、右齿条32向相反的方向移动,左齿条31、右齿
条32带动第一左滑杆21、第一右滑杆22的移动。
30.第一左滑杆21的另一端铰接左摆动杆51的一端,左摆动杆51的另一端铰接导流罩6的左侧位置,第一右滑杆22的另一端铰接右摆动杆52的一端,右摆动杆52的另一端铰接导流罩6的右侧位置。具体的,导流罩6的左侧位置设置左撑杆61,导流罩6的右侧位置设置右撑杆62,左摆动杆51的另一端铰接左撑杆61的末端,右摆动杆52的另一端铰接右撑杆62的末端。如此,第一左滑杆21、第一右滑杆22的移动,可以经左摆动杆51、右摆动杆52带动导流罩6向左或向右摆动。通过改变导流罩6的摆动方向,以灵活调节潜航器的推进方向,提高潜航器的机动性。
31.导流罩6内设置螺旋桨7,将螺旋桨7设置于导流罩6内,可以减少潜航器的动力损耗。
32.支撑套筒1的后端左侧设置第二左滑套13,支撑套筒1的后端右侧设置第二右滑套14。第二左滑套13内滑动连接第二左滑杆23,第二右滑套14内滑动连接有第二右滑杆24。第二左滑杆23的一端装配连接左齿条31的另一端,第二右滑杆24的一端装配连接右齿条32的另一端。如此,使第一左滑杆21和第二左滑杆23共同支撑左齿条31,保持左齿条31与驱动齿轮4的啮合间隙,使第一右滑杆22和第二右滑杆24共同支撑右齿条32,保持右齿条32与驱动齿轮4的啮合间隙。
33.第一左滑杆21的中间位置转动连接有与第一左滑套11内壁接触的滚轮8,第一右滑杆22的中间位置转动连接有与第一右滑套12内壁接触的滚轮8;第二左滑杆23的中间位置转动连接有与第二左滑套13内壁接触的滚轮8,第二右滑杆24的中间位置转动连接有与第二右滑套14内壁接触的滚轮8。如此,使滑杆与滑套之间滚动接触以延长使用寿命,同时,通过滚轮8实现滑杆与滑套之间的限位。
34.本实用新型实施例还提供一种潜航器,潜航器9上设置本实施例上述的角度可调节的导流罩总成。具体的,角度可调节的导流罩总成设置于潜航器9后端的中间位置,通过一个角度可调节的导流罩总成实现对潜航器9的推进以及调节潜航器的推进方向。
35.实施例2:
36.如图3所示,本实施例与实施例1的不同之处在于,角度可调节的导流罩总成设置于潜航器9后端的左右两侧位置,通过左右两侧的角度可调节的导流罩总成配合,实现对潜航器9的推进以及调节潜航器的推进方向。
37.至此,已经结合附图对本实施例进行了详细描述。依据以上描述,本领域技术人员应当对本实用新型一种角度可调节的导流罩总成有了清楚的认识。本实用新型的角度可调节的导流罩总成,结构简单,成本较低,设计巧妙,将其应用于潜航器9,通过将螺旋桨7设置于导流罩6内,可以减少其动力损耗,由伺服电机带动驱动齿轮4转动,使左齿条31、右齿条32向相反的方向移动,进而经左摆动杆51、右摆动杆52带动导流罩6向左或向右摆动,以改变导流罩6的摆动方向,以灵活调节潜航器9的推进方向,提高潜航器9的机动性。
38.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

