1.本发明涉及水下结构清洁技术领域,更具体的说是涉及一种适用于水下环境清刷的智能清洗机器人。
背景技术:
2.水下环境的结构物,例如船体、养殖网箱、海上钻井平台、港口岸堤、浮式码头及水利大坝等,经过长期海水浸泡作用,在其表面会附着贝类和锈斑等,严重影响了水下结构的正常使用功能,去除附着的海生物及杂物有助于降低海上事故发生风险、增强稳定性及抗风暴能力,同时降低船舶能源损耗了,节省运营成本。
3.但是,目前国内外对于水下结构的清刷工作多通过潜水员潜水人工清洗的方式,潜水员由于潜水环境及人体能影响,一方面,水下环境复杂,潜水员水下作业安全风险高,另外无法快速完成水下结构清洗任务,而且潜水员在水下进行清洗,无法验证清洗质量,对清洗效果的验收造成了困难,同时潜水员在水下大多数使用清洗刷进行清洗,会对水下结构造成破坏,进而影响寿命。
4.因此,提供一种快速且无损水下结构的适用于水下环境清刷的智能清洗机器人是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种适用于水下环境清刷的智能清洗机器人,能够对水下结构表面附着物进行全面彻底的清洗。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种适用于水下环境清刷的智能清洗机器人,包括水下机器人和地面站操控台;
8.所述水下机器人包括机器人本体和清洗设备;所述清洗设备柔性安装在所述机器人本体上;
9.所述地面站操控台与所述机器人本体电性连接。
10.通过采取以上方案,本发明的有益效果是:
11.地面站操控台用于控制水下机器人及提供水下机器人运转所需的电能,实现半自控作业,机器人本体具有高机动性的空间运动能力,通过机器人本体带动清洗设备能够对长时间附着于水下结构的海生物及杂物进行强有力的清洗且能够对水下结构进行全方位的清洗。
12.进一步的,所述机器人本体包括机体框架、第一浮力板、第二浮力板、布放回收钩、短基线定位系统、传感设备、监控设备及动力设备;
13.所述机体框架沿其前后运动方向的两侧分别具有密封的主控耐压舱和驱动耐压舱;所述主控耐压舱内部布放有控制系统;所述驱动耐压舱内部布放有动力驱动系统;所述控制系统、所述动力驱动系统和所述地面站操控台之间电性连接;所述机体框架底部设置有多个导向轮;
14.所述第一浮力板安装在所述机体框架的顶部;所述短基线定位系统安装在所述机体框架上,并且贯穿延伸出所述第一浮力板;所述第二浮力板安装在所述机体框架的底部;多个所述导向轮均贯穿延伸出所述第二浮力板;所述清洗设备柔性安装在所述机体框架底部,并延伸贯穿所述第二浮力板;
15.所述布放回收钩固定在所述机体框架上,并且贯穿延伸出所述第一浮力板;
16.所述动力设备安装在所述机体框架上;所述传感设备安装在所述机体框架或所述第一浮力板及所述第二浮力板上;所述监控设备安装在所述机体框架或所述第一浮力板上;所述动力设备与所述动力驱动系统电性连接;所述传感设备和所述监控设备分别与所述控制系统电性连接。
17.采用上述进一步的技术方案产生的有益效果为:
18.1)三层结构设计,且中间层采用机体框架,能够在保证强度的同时尽可能的降低总体重量且简化结构,具有良好的水动力特性;
19.2)第一浮力板和第二浮力板能够提供浮力,增强了流线性能;
20.3)布放回收钩方便机器人本体的布放及回收起吊,提高了布放回收的效率和安全度,方便简单,稳定可靠;
21.4)导向轮便于机器人本体沿船壁紧贴运动,并保证安全高效作业的合适距离;
22.5)利用短基线定位系统实现机器人本体水中的位置控制,根据短基线定位系统反馈的实时位置信息来确定机器人本体当前的位置,以此位置与预设位置进行对比,然后控制相应动力设备工作,实现机器人本体在水中位置调整,以到达预设控制位置。
23.进一步的,所述监控设备包括多个前视摄像头、多个后视摄像头、多个前照明灯和多个后照明灯;
24.多个所述前视摄像头和多个所述后视摄像头分别安装在所述机体框架沿其前后运动方向的两侧;
25.多个所述前照明灯和多个所述后照明灯分别安装在所述第一浮力板沿其前后运动方向的两侧;
26.多个所述前视摄像头、多个所述后视摄像头、多个所述前照明灯和多个所述后照明灯均与所述控制系统电性连接。
27.采用上述进一步的技术方案产生的有益效果为,通过前视摄像头和后视摄像头能够全方位观察判别需要清理的部位,前照明灯和后照明灯能够提高清晰度。
28.进一步的,所述动力设备包括四个水平矢量推进器和四个垂直推进器;
29.四个所述水平矢量推进器分别水平固定在所述机体框架的四个角端;四个所述垂直推进器分别垂直固定在所述机体框架的四个角端与所述水平矢量推进器相邻;
30.四个所述水平矢量推进器和四个所述垂直推进器分别与所述动力驱动系统电性连接。
31.采用上述进一步的技术方案产生的有益效果为,四个水平矢量推进器和四个垂直推进器相互配合达到相应的运动状态,达到控制机器人本体纵向、横向、垂向、横滚、俯仰、转艏运动的目的,实现机器人本体的多自由度运动控制。
32.进一步的,所述传感设备包括深度传感器和姿态传感器;所述深度传感器和所述姿态传感器均安装在所述机体框架上;所述深度传感器和所述姿态传感器均与所述控制系
统电性连接。
33.采用上述进一步的技术方案产生的有益效果为,根据姿态传感器反馈回来的三轴姿态角度,进行算法预算,保持前进的航向角不断自我修正,保持预定方向航行;利用深度传感器的深度反馈值,在实时利用深度数据进行pid控制,反馈在垂直推进器的转向和转速的改变,实现自主的深度控制。
34.进一步的,所述清洗设备包括两个空化射流刷盘;两个所述空化射流刷盘均通过弹簧并排安装在所述机体框架的底部,并且两个所述空化射流刷盘均通过连接管与泵站连接相通。
35.采用上述进一步的技术方案产生的有益效果为,两个空化射流刷盘之间并排布置,能够提高清洗效果,同时空化射流刷盘与机器人本体之间使用弹簧进行柔性连接,减少了对水下结构清洗过程中由于附着物凸凹不平造成的贴壁运动震荡和卡顿现象。
36.进一步的,所述第一浮力板和所述第二浮力板的边角端均设置有防撞橡胶条。
37.采用上述进一步的技术方案产生的有益效果为,能够对机器人本体进行碰撞保护。
38.进一步的,所述地面站操控台包括上位机及与其电性连接的显示器和遥控器;
39.所述控制系统包括控制器、电力通信模块和进舱转接板;所述控制器通过所述电力通信模块与所述上位机电性连接,所述控制器通过所述进舱转接板分别与所述前视摄像头、所述后视摄像头、所述前照明灯、所述后照明灯、所述深度传感器和所述姿态传感器电性连接;
40.所述动力驱动系统包括动力驱动转换板、dc
‑
dc转换器以及为其提供电源的驱动电源;所述动力驱动转换板分别与所述水平矢量推进器和所述垂直推进器电性连接;所述控制器与所述动力驱动转换板电性连接;所述dc
‑
dc转换器与所述进舱转接板电性连接。
41.采用上述进一步的技术方案产生的有益效果为,控制器接收上位机的数据指令,然后利用can通信的方式发送到动力驱动转接板的处理器,对动力设备进行操控;进舱转接板实现各种设备进入主控耐压舱时的走线转接,避免内部线路杂乱多的状态,还用于与驱动耐压舱内dc
‑
dc转换器连接电源及信号;显示器用于显示机器人本体的水下工作状态,指导操控员操作,使得机器人本体紧贴水下结构外壁清洗,达到最好的清洗效果和最大的清洗效率。
42.进一步的,所述控制器和所述动力驱动转换板的处理器型号均为stm32f407。
43.进一步的,所述机体框架的材质为聚丙烯;所述主控耐压舱和所述驱动耐压舱的材质均为7075
‑
t6铝合金。
44.采用上述进一步的技术方案产生的有益效果为,聚丙烯材质制作的机体框架无毒、无臭、无味,具有强度高的耐腐蚀、易于加工、密度接近于水等优点;主控耐压舱和驱动耐压舱的材质选择为7075
‑
t6铝合金,能够满足水下环境使用的强度,安全可靠。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据
提供的附图获得其他的附图。
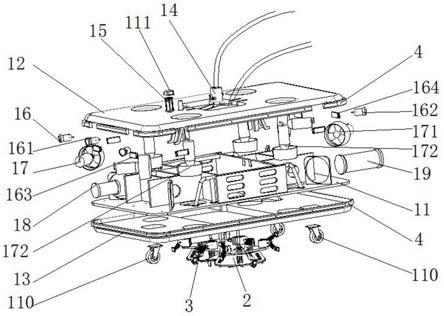
46.图1附图为本发明提供的一种适用于水下环境清刷的智能清洗机器人的爆炸图;
47.图2附图为本发明提供的一种适用于水下环境清刷的智能清洗机器人的整体结构示意图;
48.图3附图为本发明提供的一种适用于水下环境清刷的智能清洗机器人的仰视图;
49.图4附图为本发明提供的一种适用于水下环境清刷的智能清洗机器人在使用时的结构示意图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.如图1
‑
4所示,本发明实施例公开了一种适用于水下环境清刷的智能清洗机器人,包括水下机器人a和地面站操控台b;
52.水下机器人a包括机器人本体1和清洗设备2;清洗设备2柔性安装在机器人本体1上;
53.地面站操控台b与机器人本体1电性连接。具体地面站操控台b与机器人本体1通过能源站c电性连接,能源站c负责给水下机器人a提供作业需要的电力和高压水源等能源,能源站c通过通信线缆连接地面站操控台b并进行数据交互,能源站c通过防水脐带缆向水下机器人a提供作业所需的能源,并与水下机器人a进行数据交互。
54.本发明地面站操控台b用于控制水下机器人a及提供水下机器人a运转所需的电能,实现半自控作业,机器人本体1具有高机动性的空间运动能力,通过机器人本体1带动清洗设备2能够对长时间附着于水下结构的海生物进行强有力的清洗且能够对水下结构进行全方位的清洗。
55.具体的,机器人本体1包括机体框架11、第一浮力板12、第二浮力板13、布放回收钩14、短基线定位系统15、传感设备111、监控设备16及动力设备17;
56.机体框架11沿其前后运动方向的两侧分别具有密封的主控耐压舱18和驱动耐压舱19;主控耐压舱18内部布放有控制系统;驱动耐压舱19内部布放有动力驱动系统;控制系统、动力驱动系统和地面站操控台之间电性连接;机体框架11底部设置有多个导向轮110;
57.第一浮力板12安装在机体框架11的顶部;短基线定位系统15安装在机体框架11上,并且贯穿延伸出所述第一浮力板12,型号为bluetrack
‑
500;第二浮力板13安装在机体框架11的底部;多个导向轮110均贯穿延伸出第二浮力板13;清洗设备2柔性安装在机体框架11底部,并延伸贯穿第二浮力板13;
58.布放回收钩14固定在机体框架11上,并且贯穿延伸出第一浮力板12;
59.动力设备17安装在机体框架11上;传感设备111安装在机体框架11或第一浮力板12及第二浮力板13上;监控设备16安装在机体框架11或第一浮力板12上;动力设备17与动力驱动系统电性连接;传感设备111和监控设备16分别与控制系统电性连接。
60.具体的,监控设备16包括多个前视摄像头161、多个后视摄像头162、多个前照明灯
163和多个后照明灯164;
61.多个前视摄像头161和多个后视摄像头162分别安装在机体框架11沿其前后运动方向的两侧;多个前视摄像头161和多个后视摄像头162均为红外摄像机,分辨率1080p;
62.多个前照明灯163和多个后照明灯164分别安装在第一浮力板12沿其前后运动方向的两侧;
63.多个前视摄像头161、多个后视摄像头162、多个前照明灯163和多个后照明灯164均与控制系统电性连接。
64.具体的,动力设备17包括四个水平矢量推进器171和四个垂直推进器172;
65.四个水平矢量推进器171分别水平固定在机体框架11的四个角端;四个垂直推进器172分别垂直固定在机体框架11的四个角端与水平矢量推进器171相邻;
66.四个水平矢量推进器171和四个垂直推进器172分别与动力驱动系统电性连接。
67.具体的,传感设备111包括深度传感器和姿态传感器;深度传感器和姿态传感器均安装在机体框架11上;深度传感器和姿态传感器均与控制系统电性连接;传感设备111具体型号为mepus
‑
att1。
68.具体的,清洗设备2包括两个空化射流刷盘21;两个空化射流刷盘21均通过弹簧3并排安装在机体框架11的底部,并且两个空化射流刷盘21均通过连接管与泵站连接相通。
69.具体的,第一浮力板12和第二浮力板13的边角端均设置有防撞橡胶条4。
70.具体的,地面站操控台c包括上位机及与其电性连接的显示器和遥控器;
71.控制系统包括控制器、电力通信模块和进舱转接板;控制器通过电力通信模块与上位机电性连接,控制器通过进舱转接板分别与前视摄像头161、后视摄像头162、前照明灯163、后照明灯164、深度传感器和姿态传感器电性连接;
72.动力驱动系统包括动力驱动转换板、dc
‑
dc转换器以及为其提供电源的驱动电源;动力驱动转换板分别与水平矢量推进器171和垂直推进器172电性连接;控制器与动力驱动转换板电性连接;dc
‑
dc转换器与进舱转接板电性连接。
73.具体的,控制器和动力驱动转换板的处理器型号均为stm32f407。
74.具体的,机体框架11的材质为聚丙烯;主控耐压舱18和驱动耐压舱19的材质均为7075
‑
t6铝合金。
75.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
76.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

