1.本实用新型涉及趸船技术领域,尤其涉及一种趸船引桥的对位装置。
背景技术:
2.目前,在长江等内河流域中,采用浮码头来进行货物、车辆、人员的运输是一种常见形式,尤其在水位差较大的中上游地区更是得到广泛的应用,它具有造价低、水位适应性好的特点。
3.浮码头与江岸的连接基本上是通过搁置在趸船上的活动钢引桥来实现的,每次调整趸船的位置都需要有专人跑上去看移位变化情况,效率很低。
技术实现要素:
4.本实用新型提供一种趸船引桥的对位装置,解决的技术问题在于:如何引导趸船实现精准对位。
5.为解决以上技术问题,本实用新型提供一种趸船引桥的对位装置,包括控制模块及与其连接的滚动传感器、伸缩旋转模块、直射矩形光源、光电传感器和led指示模块;
6.所述滚动传感器安装于趸船引桥的行进滚轮或行进滚轮的轴上,在所述行进滚轮发生滚动时发送信号至所述控制模块;
7.所述伸缩旋转模块安装于所述趸船引桥的一侧壁上,位于所述行进滚轮的上方;在所述控制模块的控制下,所述伸缩旋转模块向外伸出后旋转预设角度或回旋预设角度后缩回;
8.所述直射矩形光源安装于所述伸缩旋转模块的端部,当所述伸缩旋转模块向外伸出并旋转到位时,在所述控制模块的控制下,所述直射矩形光源直发出矩形光束,照向所述趸船引桥下的承接平台的侧壁;
9.所述承接平台的侧壁上沿所述趸船引桥的行进方向顺序设有第一矩形反光条和第二矩形反光条;在高度上,所述第一矩形反光条<所述矩形光束≤所述第二矩形反光条,且所述第二矩形反光条是所述第一矩形反光条的2倍至3倍;在宽度上,所述矩形光束<所述第二矩形反光条<第一矩形反光条;
10.所述光电传感器安装于所述伸缩旋转模块的端部,将探测到的电能发送到所述控制模块;
11.所述led指示模块安装于所述趸船引桥的顶面,在所述控制模块的控制下至少发出一种颜色的光。
12.优选的,所述led指示模块包括沿所述趸船引桥的行进方向顺序设置的第一led灯组、第二led灯组、第三led灯组,分别在所述行进滚轮行进在第一范围内、第二范围内和第三范围内时发出第一颜色光、第二颜色光、第三颜色光;
13.所述第一范围在所述第一矩形反光条前,所述第二范围为所述第一矩形反光条的宽度范围,所述第三范围为所述第二矩形反光条的宽度范围。
14.优选的,所述第一led灯组、第二led灯组、第三led灯组沿着所述趸船引桥的边缘设置。
15.优选的,所述第一颜色光、第二颜色光、第三颜色光分别为红色光、黄色光和绿色光。
16.本实用新型提供的一种趸船引桥的对位装置,还包括连接所述控制模块的电源模块。
17.优选的,所述电源模块为太阳能供电模块,所述太阳能供电模块的光伏板设置在所述趸船引桥的侧壁上。
18.优选的,所述电源模块为从驾驶舱接出的电源线。
19.本实用新型提供的一种趸船引桥的对位装置,其滚动传感器一感应到(趸船引桥的)行进滚轮的滚动,控制模块随即打开伸缩旋转模块,当伸缩旋转模块伸出并旋转到位时,立即开启直射矩形光源发出矩形光束照向趸船引桥下的承接平台的侧壁,由于该侧壁上设有第一矩形反光条和第二矩形反光条,而第一矩形反光条和第二矩形反光条在高度和宽度上均不相同,使得第一矩形反光条反射的光量明显小于第二矩形反光条,从而通过判断光电传感器所接收到的光能的大小可判定此时行进滚轮的位置,当行进滚轮对应第二矩形反光条时,表示趸船已经行进到位,此时led指示模块进行发光指示,驾驶人员观察到led指示模块发出的光可得知趸船已经停靠到位。
20.相比现有方案,本实用新型无需额外的人力,可保证趸船的精准对位。
附图说明
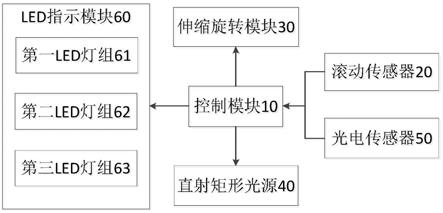
21.图1是本实用新型实施例提供的一种趸船引桥的对位装置的模块结构图;
22.图2是本实用新型实施例提供的一种趸船引桥的对位装置应用时的立体图;
23.图3是本实用新型实施例提供的一种趸船引桥的对位装置在对位时的状态图。
24.附图标记:控制模块10,滚动传感器20,伸缩旋转模块30,直射矩形光源40,光电传感器50,led指示模块60,趸船引桥1,行进滚轮2,承接平台3,第一矩形反光条4,第二矩形反光条5,矩形光束6,第一led灯组61,第二led灯组62,第三led灯组63。
具体实施方式
25.下面结合附图具体阐明本实用新型的实施方式,实施例的给出仅仅是为了说明目的,并不能理解为对本实用新型的限定,包括附图仅供参考和说明使用,不构成对本实用新型专利保护范围的限制,因为在不脱离本实用新型精神和范围基础上,可以对本实用新型进行许多改变。
26.为实现停靠时趸船引桥的精准对位,如图1的模块结构图和图2的立体图所示,本实用新型实施例提供的一种趸船引桥的对位装置,包括控制模块10及与其连接的滚动传感器20、伸缩旋转模块30、直射矩形光源40、光电传感器50和led指示模块60;
27.滚动传感器20安装于趸船引桥1的行进滚轮2(或行进滚轮2的轴)上,在行进滚轮2发生滚动时发送信号至控制模块10;
28.伸缩旋转模块30安装于趸船引桥1的一侧壁上,位于行进滚轮2的上方;在控制模块10的控制下,伸缩旋转模块30向外伸出预设角度后旋转或旋回预设角度后缩回;
29.直射矩形光源40安装于伸缩旋转模块30的端部,当伸缩旋转模块30向外伸出并旋转到位时,在控制模块10的控制下,直射矩形光源40直发出矩形光束6,照向趸船引桥1下的承接平台3的侧壁;
30.承接平台3的侧壁上沿趸船引桥1的行进方向顺序设有第一矩形反光条4和第二矩形反光条5;在高度上,第一矩形反光条4<矩形光束6≤第二矩形反光条5,且第二矩形反光条5是第一矩形反光条4的2倍至3倍;在宽度上,矩形光束6<第二矩形反光条5<第一矩形反光条4;
31.光电传感器50安装于伸缩旋转模块30的端部,将探测到的电能发送到控制模块10;
32.led指示模块60安装于趸船引桥1的顶面,在控制模块10的控制下至少发出一种颜色的光。
33.本实用新型提供的一种趸船引桥的对位装置,设置滚动传感器20一感应到(趸船引桥1的)行进滚轮2的滚动,控制模块10随即打开伸缩旋转模块30,当伸缩旋转模块30伸出并旋转到位时,立即开启直射矩形光源40发出矩形光束6照向趸船引桥1下的承接平台3的侧壁,由于该侧壁上设有第一矩形反光条4和第二矩形反光条5,而第一矩形反光条4和第二矩形反光条5在高度和宽度上均不相同,使得第一矩形反光条4反射的光量明显小于第二矩形反光条5,从而通过判断光电传感器50所接收到的光能的大小可判定此时行进滚轮2的位置,当行进滚轮2对应第二矩形反光条5时,表示趸船已经行进到位,此时led指示模块60进行发光指示,驾驶人员观察到led指示模块60发出的光可得知趸船已经停靠到位。相比现有方案,本实用新型无需额外的人力,可保证趸船的精准对位。
34.如图3所示,本实施例优选矩形光束6的宽度=第二矩形反光条5的宽度*0.8,第一矩形反光条4的宽度=3*第二矩形反光条5的宽度,第二矩形反光条5的高度*0.8=矩形光束6的高度,第二矩形反光条5的高度=3*第一矩形反光条4的高度。如此,因为矩形光束6的高度和宽度都是一定的,在行进滚轮2的行进过程中,会依次经过第一范围、第二范围和第三范围,而第一范围即在行进滚轮2到达第一矩形反光条4前,第二范围为第一矩形反光条4的宽度范围,第三范围为第二矩形反光条5的宽度和高度范围。
35.为了对这三个范围进行指示,本实用新型设置led指示模块60包括第一led灯组61、第二led灯组62、第三led灯组63,如图1所示,分别在行进滚轮2行进在第一范围内、第二范围内和第三范围内时发出第一颜色光、第二颜色光、第三颜色光。而不同颜色光的发出,是基于光电传感器50获取的电能不一致,在第一范围内没有设置任何的反光条,光电传感器50获取的电能微乎其微,在第二范围内设有第一矩形反光条4,光电传感器50获取的电能呈现迅猛上升后到达一定值,在第三范围内设有第二矩形反光条5,光电传感器50获取的电能呈现缓慢上升后到达一定值。
36.本实施例优选的,第一led灯组61、第二led灯组62、第三led灯组63沿着趸船引桥1的边缘设置,以免占据趸船引桥1的通道。
37.本实施例优选的,第一颜色光、第二颜色光、第三颜色光分别为红色光、黄色光和绿色光。也即:在行进滚轮2到达第一矩形反光条4之前,红色的光亮起,以提醒驾驶人员需降低速度,缓慢前行;在行进滚轮2处于第一矩形反光条4的宽度范围之间时,黄色的光亮起,以提醒驾驶人员需进一步降低速度,缓慢前行;在行进滚轮2处于第二矩形反光条5的宽
度范围之间时,绿灯亮起,表示趸船引桥1已经到位,需停止行进,可采取下一步的操作。
38.为了节约电能,本实施例采取一个范围只亮起对应颜色的光的方式。当然,在其他实施方式中,可采取第一范围亮红色光、第二范围亮红色光和黄色光、第三范围亮红色光、黄色光和绿色光的方式或者是其他方式,同样能起到相应的指示作用。
39.还需要说明的是,在其他实施方式中,第一颜色光、第二颜色光和第三颜色光可以是其他颜色的光,光与光之间能够明显区分开来则都是可行的。
40.本实施例优选的,伸缩旋转模块30采用基于气缸的伸缩杆以及对该伸缩杆进行旋转的机构,伸缩杆的端部通过一连接杆固定有一平板,该平板上固定有直射矩形光源40和光电传感器50,而直射矩形光源40和光电传感器50与控制模块10之间的连接线可直接布置在连接杆和伸缩杆内。在不需要停靠的一般状态下,伸缩旋转模块30均处于收回状态,以保护直射矩形光源40和光电传感器50,还可避免对趸船引桥1的活动造成影响。
41.在一个电学装置中,电源模块是必不可少的,基于趸船引桥1长期处于室外环境中,可直接设置太阳能供电模块,太阳能供电模块的光伏板设置在趸船引桥1的侧壁上。或者是,直接从驾驶舱接出电源线进行供电。无论是何种方式,都是目前常见的供电方式,本实施例不再赘述。
42.另外,关于本实施例所用到的滚动传感器20、伸缩旋转模块30、直射矩形光源40、光电传感器50和led指示模块60,现有技术也多有公开,本实施例无需作更具体的说明。
43.至于控制模块10,采用相应的单片机即可,而采用单片机获取滚动传感器20的信号、控制伸缩旋转模块30的伸出和缩回、控制伸缩旋转模块30的旋转、控制开启直射矩形光源40、控制开启光电传感器50、获取光电传感器50的信号并进行处理、控制不同颜色的led灯组开启这些应用,现有技术已多有公开,即可以认为,本实施例并不涉及任何计算机程序的改进。
44.上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

