1.本实用新型具体是一种脚踏机械鱼胸鳍船桨推进器,涉及驱动船舶行驶的器具相关领域。
背景技术:
2.船桨是利用费力杠杆的原理模拟鱼的胸鳍与腹鳍,起到可以像鱼的胸鳍与腹鳍一样,在船的两侧持续地前后划动,是一种将船体缓缓前向推进的工具,船桨的上端为圆杆,便于手握,叫做握杆;下端为板状,名叫桨板,用以拨水,根据物理学上的牛顿第三定律,通过水体的反作用力,使船体前向推进,在船舶使用过程中需要用到脚踏机械鱼胸鳍船桨推进器。
3.但是脚踏机械鱼胸鳍船桨推进器一般都是通过螺栓将固定架与船舶固定连接,通过控制开关启动电机,电机通过驱动器带动动力输出头转动,动力输出头带动螺旋叶片转动进行推进,但是传统脚踏机械鱼胸鳍船桨推进器对于固定架连接较为麻烦,在使用过程中需要花费大量时间对固定架进行安装,即浪费人力又浪费时间,同时传统脚踏机械鱼胸鳍船桨推进器对于推杆驱动效果较差,导致使用不方便。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种脚踏机械鱼胸鳍船桨推进器。
5.本实用新型是这样实现的,构造一种脚踏机械鱼胸鳍船桨推进器,该装置包括推进器主体,所述推进器主体顶部左端固定有固定架,所述固定架外表面上端设置有快速安装装置,所述快速安装装置包括环套、紧固板、壳体、手轮、锁紧件、驱动机构、滑槽、推杆和弹簧,所述环套内部设置有紧固板,所述壳体与环套外表面固定连接,所述手轮安装于壳体顶部左前端,所述锁紧件安装于手轮底部,所述壳体内部左端设置有驱动机构,所述滑槽与壳体内部右端固定连接,所述推杆与紧固板左端固定连接,所述弹簧套接于推杆外表面右前端,所述环套与固定架外表面上端固定连接。
6.优选的,所述推进器主体右端设置有整流罩,所述推进器主体左端设置有动力输出连接头,所述动力输出连接头外表面等距设置有螺旋桨叶,所述螺旋桨叶外表面设置有螺旋桨叶罩,所述整流罩内部设置有散热片,所述推进器主体内部右端设置有电机,所述推进器主体内部左端安装有驱动器,并且驱动器与电机输出端转动连接,所述输出连接头与驱动器左端固定连接,所述固定架内部左下端设置有电动推杆,所述电动推杆左上端设置有电源线。
7.优选的,所述驱动机构包括连接杆、第一长杆、短杆和第二长杆,所述连接杆右端设置有第一长杆,所述短杆与第一长杆左端铰接,所述第二长杆一端与连接杆左端铰接,并且第二长杆另一端与推杆左端铰接,所述连接杆与手轮背面固定连接,所述短杆与壳体内部左上端铰接。
8.优选的,所述滑槽内侧面呈光滑平面,并且推杆与滑槽内侧面滑动连接。
9.优选的,所述手轮直径设置为10厘米,并且手轮外表面设置有一层防滑纹路。
10.优选的,所述锁紧件长度设置为8厘米,并且锁紧件通过螺栓与壳体顶部左前端固定连接。
11.优选的,所述连接杆左端与手轮中心线处于同一水平方向,并且手轮带动连接杆转动角度为360
°
。
12.优选的,所述短杆摆动时与第一长杆之间的夹角逐渐递减,并且短杆与第一长杆之间的夹角范围为30
°‑
130
°
。
13.优选的,所述紧固板为铝合金材质。
14.优选的,所述推进器主体为不锈钢材质。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种脚踏机械鱼胸鳍船桨推进器,与同类型设备相比,具有如下改进:
16.优点1:本实用新型所述一种脚踏机械鱼胸鳍船桨推进器,通过在固定架外表面上端设置了快速安装装置,通过锁紧件恢复手轮转动状态,顺时针转动手轮,手轮带动驱动机构活动,驱动机构带动推杆活动,使推杆在滑槽内侧面进行滑动,推杆带动紧固板进行活动,使紧固板与外部设备相抵住,达到快速安装固定架的效果。
17.优点2:本实用新型所述一种脚踏机械鱼胸鳍船桨推进器,通过壳体内部左端设置了驱动机构,通过手轮带动连接杆摆动,连接杆带动第一长杆摆动,第一长杆带动短杆摆动,同时连接杆带动第二杆摆动,第一长杆和第二长杆相配合带动推杆活动,达到驱动推杆活动的效果。
附图说明
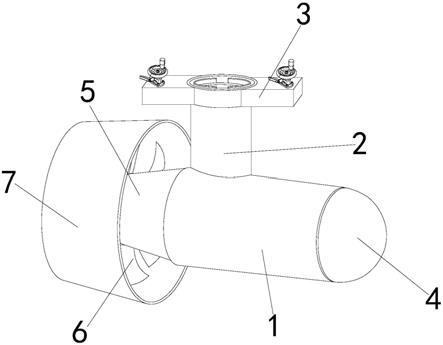
18.图1是本实用新型结构示意图;
19.图2是本实用新型正面剖视结构示意图;
20.图3是本实用新型快速安装装置结构示意图;
21.图4是本实用新型快速安装装置俯面剖视结构示意图;
22.图5是本实用新型驱动机构俯面剖视结构示意图。
23.其中:推进器主体
‑
1、固定架
‑
2、快速安装装置
‑
3、整流罩
‑
4、动力输出连接头
‑
5、螺旋桨叶
‑
6、螺旋桨叶罩
‑
7、散热片
‑
8、电机
‑
9、驱动器
‑
10、电动推杆
‑
11、电源线
‑
12、环套
‑
31、紧固板
‑
32、壳体
‑
33、手轮
‑
34、锁紧件
‑
35、驱动机构
‑
36、滑槽
‑
37、推杆
‑
38、弹簧
‑
39、连接杆
‑
361、第一长杆
‑
362、短杆
‑
363、第二长杆
‑
364。
具体实施方式
24.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1和图2,本实用新型通过改进在此提供一种脚踏机械鱼胸鳍船桨推进器,包括推进器主体1,推进器主体1顶部左端固定有固定架2,推进器主体1为不锈钢材质,具有更长的使用寿命的优点,固定架2外表面上端设置有快速安装装置3,推进器主体1右端
设置有整流罩4,推进器主体1左端设置有动力输出连接头5,动力输出连接头5外表面等距设置有螺旋桨叶6,螺旋桨叶6外表面设置有螺旋桨叶罩7,整流罩4内部设置有散热片8,推进器主体1内部右端设置有电机9,推进器主体1内部左端安装有驱动器10,并且驱动器10与电机9输出端转动连接,输出连接头5与驱动器10左端固定连接,固定架2内部左下端设置有电动推杆11,电动推杆11左上端设置有电源线12。
26.请参阅图3和图4,本实用新型通过改进在此提供一种脚踏机械鱼胸鳍船桨推进器,快速安装装置3包括环套31、紧固板32、壳体33、手轮34、锁紧件35、驱动机构36、滑槽37、推杆38和弹簧39,环套31内部设置有紧固板32,紧固板32为铝合金材质,具有更强的耐腐蚀性的优点,壳体33与环套31外表面固定连接,有利于更好的对壳体33进行固定安装,手轮34安装于壳体33顶部左前端,手轮34直径设置为10厘米,并且手轮34外表面设置有一层防滑纹,防止在使用过程中出现手滑的情况发生,锁紧件35安装于手轮34底部,锁紧件35长度设置为8厘米,并且锁紧件35通过螺栓与壳体33顶部左前端固定连接,以便于更好的对手轮34进行锁紧,壳体33内部左端设置有驱动机构36,滑槽37与壳体33内部右端固定连接,有利于更好的对滑槽37进行固定安装,滑槽37内侧面呈光滑平面,并且推杆38与滑槽37内侧面滑动连接,以便于推杆38更好的在滑槽37内侧面进行滑动,推杆38与紧固板32左端固定连接,有利于更好的对推杆38进行固定安装,弹簧39套接于推杆38外表面右前端,环套31与固定架2外表面上端固定连接。
27.请参阅图5,本实用新型通过改进在此提供一种脚踏机械鱼胸鳍船桨推进器,驱动机构36包括连接杆361、第一长杆362、短杆363和第二长杆364,连接杆361右端设置有第一长杆362,有利于好的对第一长杆362进行固定安装,短杆363与第一长杆362左端铰接,短杆363摆动时与第一长杆362之间的夹角逐渐递减,并且短杆363与第一长杆362之间的夹角范围为30
°‑
130
°
,以便于第一长杆362更好的带动短杆363进行摆动,第二长杆364一端与连接杆361左端铰接,并且第二长杆364另一端与推杆38左端铰接,有利于更好的对第二长杆364进行固定安装,连接杆361与手轮34背面固定连接,连接杆361左端与手轮34中心线处于同一水平方向,并且手轮34带动连接杆361转动角度为360
°
,以便于手轮34更好的带动连接杆361进行转动,短杆363与壳体33内部左上端铰接。
28.本实用新型通过改进提供一种脚踏机械鱼胸鳍船桨推进器,按照如下方式运行;
29.第一,首先将本装置移动至需要的地方,接着将固定架2与外部设备连接端相对齐,将电源线12与外部设备相连接;
30.第二,通过锁紧件35恢复手轮34转动状态,顺时针转动手轮34,手轮34带动连接杆361摆动,连接杆361带动第一长杆362摆动,第一长杆362带动短杆363摆动,同时连接杆361带动第二杆364摆动;
31.第三,第一长杆362和第二长杆364相配合带动推杆38活动,使推杆38在滑槽37内侧面进行滑动,推杆38带动紧固板32进行活动,使紧固板32与外部设备相抵住,通过锁紧件35对手轮34进行锁紧,防止手轮34自转,达到快速安装固定架2的效果;
32.第四,通过外部控制开关启动电机9,电机9带动驱动器10运行,驱动器10带动动力输出连接头5转动,动力输出连接头5带动螺旋桨叶6在螺旋桨叶罩7内转动,达到推进的效果;
33.第五,当本装置使用完毕后,通过锁紧件35恢复手轮34转动状态,逆时针转动手轮
34,使紧固板32与外部设备连接端相分离,接着将电源线12从外部设备上拔出,最后将推进器主体1从外部设备上拆除即可。
34.本实用新型通过改进提供一种脚踏机械鱼胸鳍船桨推进器,通过在固定架2外表面上端设置了快速安装装置3,通过锁紧件35恢复手轮34转动状态,顺时针转动手轮34,手轮34带动驱动机构36活动,驱动机构36带动推杆38活动,使推杆38在滑槽37内侧面进行滑动,推杆38带动紧固板32进行活动,使紧固板32与外部设备相抵住,达到快速安装固定架2的效果,通过壳体31内部左端设置了驱动机构36,通过手轮34带动连接杆361摆动,连接杆361带动第一长杆362摆动,第一长杆362带动短杆363摆动,同时连接杆361带动第二杆364摆动,第一长杆362和第二长杆364相配合带动推杆38活动,达到驱动推杆38活动的效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

