1.本实用新型涉及海洋遥感技术领域,并且更具体地,涉及一种漂流浮标。
背景技术:
2.漂流浮标是一种投放在海洋和江河中随着海流、河流漂移的浮体,可用于海洋和江河中的无人值守测量,借以获得气温、风速、风向、水温、波浪、海流等海洋和江河的相关数据。现有技术中,浮标内配置有各种大型测量仪器,以及维持浮标长期工作的电源,使得浮标能够长时间进行数据采集,从而导致浮标的体积较大。在测量周期较短的海洋测试过程中,设置该大型的浮标较为浪费资源。
技术实现要素:
3.本实用新型实施例提供一种漂流浮标,以解决现有的浮标的体积较大,在测量周期较短的海洋测试过程中,设置该大型的浮标较为浪费资源的问题。
4.第一方面,本实用新型实施例提供了一种漂流浮标,所述漂流浮标包括浮标本体,所述浮标本体上设置有透光区域;
5.所述浮标本体内设置有处理器模块、传感器模块、通信模块、定位模块以及电池模块,所述处理器模块的第一端与所述传感器模块连接,所述处理器模块的第二端与所述通信模块连接,所述处理器模块的第三端与所述定位模块连接,所述处理器模块的第四端与所述电池模块连接;
6.其中,所述传感器模块设置在与所述透光区域对应的位置。
7.可选的,所述浮标本体包括具容置腔的壳体,以及与所述壳体配合的封闭盖,所述壳体和所述封闭盖活动连接;
8.其中,所述处理器模块、传感器模块、通信模块、定位模块以及电池模块均设置于所述容置腔内。
9.可选的,所述封闭盖包括第一子封闭盖和第二子封闭盖,所述第一子封闭盖和第二子封闭盖分别设置于所述壳体的两端。
10.可选的,所述透光区域设置于所述第一子封闭盖或所述第二子封闭盖上。
11.可选的,所述壳体设置有第一容置腔、第二容置腔和第三容置腔,所述第二容置腔设置于所述第一容置腔和所述第三容置腔之间;
12.所述第一容置腔、第二容置腔和第三容置腔相互连通;
13.所述第二容置腔的容置空间大于所述第一容置腔的容置空间,且所述第二容置腔的容置空间大于所述第三容置腔的容置空间。
14.可选的,所述处理器模块、传感器模块、通信模块以及电池模块均设置于所述第二容置腔,所述定位模块设置于所述第三容置腔;
15.所述透光区域所在的子封闭盖靠近所述第一容置腔。
16.可选的,所述透光区域包括透光片,所述透光片与所述封闭盖通过密封胶连接,所
述封闭盖上开设有通孔,所述透光片设置在与所述通孔对应的位置。
17.可选的,所述壳体和所述封闭盖的连接处设置有防水密封圈。
18.可选的,所述处理器模块为树莓派。
19.可选的,所述浮标本体为绝缘体。
20.这样,本实用新型的漂流浮标包括浮标本体,所述浮标本体上设置有透光区域;所述浮标本体内设置有处理器模块、传感器模块、通信模块、定位模块以及电池模块,所述处理器模块的第一端与所述传感器模块连接,所述处理器模块的第二端与所述通信模块连接,所述处理器模块的第三端与所述定位模块连接,所述处理器模块的第四端与所述电池模块连接;其中,所述传感器模块设置在与所述透光区域对应的位置。本实用新型实施例能够实现小型化且低成本的漂流浮标。
附图说明
21.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
22.图1是本实用新型实施例提供的漂流浮标的结构示意图之一;
23.图2是本实用新型实施例提供的漂流浮标的结构示意图之二。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
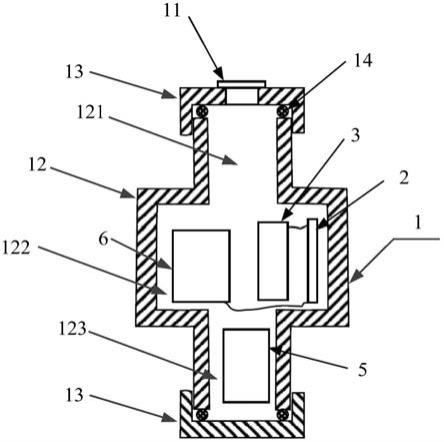
25.请参阅图1,图1是本实用新型实施例提供的一种漂流浮标的结构示意图,如图1所示,所述漂流浮标包括浮标本体1,所述浮标本体1上设置有透光区域11;
26.如图1和图2所示,所述浮标本体1内设置有处理器模块2、传感器模块 3、通信模块4、定位模块5以及电池模块6,所述处理器模块2的第一端与所述传感器模块3连接,所述处理器模块2的第二端与所述通信模块4连接,所述处理器模块2的第三端与所述定位模块5连接,所述处理器模块2的第四端与所述电池模块6连接;
27.其中,所述传感器模块3设置在与所述透光区域11对应的位置。
28.另外,本实施例中对浮标本体1的形状不做具体限定,可自行设置。例如,浮标本体1的形状可以为球形,或者圆柱状,等等。所述透光区域11可以用于将浮标本体1外的光线照射至传感器模块3,实现传感器模块3的光学测量,例如,为海洋光学传感器提供光学测量条件。
29.进一步的,所述处理器模块2可以包括树莓派(raspberry pi),或者微处理器等。树莓派的体积较小,其平面几乎为信用卡的大小,树莓派支持python 作为主要编程语言,还支持java、c语言和perl等编程语言,性能可靠,价格低廉,非常适合在漂流浮标中使用。所述传感器模块3可以包括海洋光学传感器,用于测量海水的光学传输损耗以及测量光学
光谱传输函数等。所述传感器模块3还可以包括图像传感器,用于摄像。所述传感器模块3还可以包括温度传感器、湿度传感器及气压传感器等,用于采集气象信息。需要说明的是,本实施例中对传感器的数量不做具体限定,可视情况而定。同理,本实施例中对传感器的种类也不做具体限定,视情况而定。例如,还可以有风速测量仪,等等。各个传感器可以将采集的气象信息发送至处理器模块2。
30.另外,所述通信模块4可以为无线网卡或gprs通信模块等,示例地,通信模块4可以为cdma2000无线数据终端,型号为ec122。所述通信模块4 可以从处理器模块2获取所述位置信息,所述通信模块4用于发送所述位置信息至预设终端。本实施例对预设终端不做具体限定,可自行设置。例如,预设终端可以为手机,或者电脑,等。同理,本实施例中对位置信息的发送形式也不做具体限定,视情况而定。例如,位置信息可以以邮件的形式发送至预设终端,或者以短信的形式发送至预设终端,等等。
31.进一步的,定位模块5可以为gps模块,也可以为北斗定位模块,定位模块5可以用于获取位置信息并将位置信息发送给处理器模块2,所述位置信息可以包括漂流浮标的经度和纬度。所述定位模块5可以包括备用gps模块,或者备用北斗定位模块。示例地,定位模块5可以采用1号电池供电,从而在漂流浮标数据采集完成后有足够的时间对漂流浮标进行打捞回收。所述电池模块6可以包括蓄电池,或者其他可以用于提供电能的电池模块6。示例地,所述电池模块6可以为锂电池,可以减小漂流浮标的体积和重量。
32.需要说明的是,所述浮标本体1内还可以设置有与所述处理器模块2相连的存储部件,用于存储所述位置信息和所述气象信息。当不能发送至预设终端时,可以保存获取的位置信息和气象信息,供科研人员根据位置信息和气象信息获取有价值的科研信息,避免获取的位置信息和气象信息不能发挥作用的情况。
33.另外,所述浮标本体1外侧还可以设置有太阳能电池,用于提供电能。当浮标本体1内的电池模块6不能正常供电时,可以利用太阳能电池进行供电,保证漂流浮标内的元件正常运行。所述浮标本体1外侧还可以设置有发光器,用于发出亮光。发光器可以与太阳能电池相连,在夜晚时,发光器发出亮光,便于回收人员确定漂流浮标的位置。具体的,发光器可以为led灯。
34.需要说明的是,现有技术中的大型漂流浮标,一般进行长周期数据采集,属于大型工程,大型漂流浮标通常用锚固定在一个局限的海面位置。而本实施例中的漂流浮标的结构较为简单,使得漂流浮标的体积和重量均较小,在进行海洋测试时,可以用手操作渔网布放和打捞,尤其适合在测量周期较短的海洋测试中使用。漂流浮标的体积较小,便于回收,当需要回收时,回收人员根据漂流浮标的位置信息可以快速找到漂流浮标,避免漂流浮标丢失的情况发生。
35.这样,本实用新型的漂流浮标包括浮标本体1,所述浮标本体1上设置有透光区域11;所述浮标本体1内设置有处理器模块2、传感器模块3、通信模块4、定位模块5以及电池模块6,所述处理器模块2的第一端与所述传感器模块3连接,所述处理器模块2的第二端与所述通信模块4连接,所述处理器模块2的第三端与所述定位模块5连接,所述处理器模块2的第四端与所述电池模块6连接;其中,所述传感器模块3设置在与所述透光区域11对应的位置。本实用新型实施例能够实现小型化且低成本的漂流浮标。
36.可选的,如图1所示,所述浮标本体1包括具容置腔的壳体12,以及与所述壳体12配
合的封闭盖13,所述壳体12和所述封闭盖13活动连接;
37.其中,所述处理器模块2、传感器模块3、通信模块4、定位模块5以及电池模块6均设置于所述容置腔内。
38.该实施方式中,所述壳体12内可以设置多个容置腔,例如,可以设置3 个容置腔。所述壳体12与所述封闭盖13配合,从而使得浮标本体1形成封闭结构,避免海水进入浮标本体1,从而可以延长漂流浮标的使用寿命。所述壳体12和所述封闭盖13活动连接,从而可以用手直接拧开封闭盖13,便于操作漂流浮标。
39.可选的,所述封闭盖13包括第一子封闭盖和第二子封闭盖,所述第一子封闭盖和第二子封闭盖分别设置于所述壳体12的两端。
40.该实施方式中,在所述第一子封闭盖和所述第二子封闭盖上可以均设置有透光区域11,或者,所述透光区域11设置于所述第一子封闭盖或所述第二子封闭盖上。
41.可选的,所述透光区域11设置于所述第一子封闭盖或所述第二子封闭盖上。
42.可选的,如图1所示,所述壳体12设置有第一容置腔121、第二容置腔122和第三容置腔123,所述第二容置腔122设置于所述第一容置腔121和所述第三容置腔123之间;
43.所述第一容置腔121、第二容置腔122和第三容置腔123相互连通;
44.所述第二容置腔122的容置空间大于所述第一容置腔121的容置空间,且所述第二容置腔122的容置空间大于所述第三容置腔123的容置空间。
45.其中,第一容置腔121和第三容置腔123的容置空间可以相同。所述第一容置腔121、第二容置腔122和第三容置腔123可以均为圆柱状的容置腔,且所述第二容置腔122的直径可以大于所述第一容置腔121的直径,所述第二容置腔122的直径可以大于所述第三容置腔123的直径。优选的,第二容置腔 122的直径和高度可以均为20cm,第一容置腔121和第三容置腔123的直径相同,可以均为14cm。
46.该实施方式中,设计壳体12的中间直径较大,可以容纳较多的测量部件。
47.可选的,如图1所示,所述处理器模块2、传感器模块3、通信模块4以及电池模块6均设置于所述第二容置腔122,所述定位模块5设置于所述第三容置腔123;
48.所述透光区域11所在的子封闭盖靠近所述第一容置腔121。
49.该实施方式中,所述透光区域11所在的子封闭盖靠近所述第一容置腔121,从而可以避免定位模块5遮挡光线,并且可以降低其他模块对定位模块5的干扰。
50.可选的,所述透光区域11包括透光片,所述透光片与所述封闭盖13通过密封胶连接,所述封闭盖13上开设有通孔,所述透光片设置在与所述通孔对应的位置。
51.该实施方式中,所述通孔的大小可以小于所述透光片的大小。所述透光片可以设置于遮蔽所述通孔的位置。所述透光片可以通过密封胶粘结在所述封闭盖13上,从而使得光线可以透过所述透光片和通孔进入浮标本体1,而海水无法进入浮标本体1,实现浮标本体1的密封。
52.可选的,如图1所示,所述壳体12和所述封闭盖13的连接处设置有防水密封圈14。通过防水密封圈14可以实现浮标本体1良好的封闭性,从而可以延长漂流浮标的使用寿命。
53.可选的,所述处理器模块2为树莓派。
54.该实施方式中,所述树莓派可以为3b 型树莓派或4b型树莓派等,3b 型树莓派中cpu的性能更强。树莓派体积较小,能够进一步实现漂流浮标的小型化,且采用树莓派,能够
极大地降低成本以及缩短软件设计周期。
55.可选的,所述浮标本体1为绝缘体。
56.该实施方式中,浮标本体1的材料可以采用绝缘体,例如,pvc(polyvinylchloride,聚氯乙烯),或者玻璃钢。绝缘体的浮标本体1能够让电波直接进入浮标本体1,无需外接天线,相对于采用金属材料外壳,金属材料外壳会对电波产生严重屏蔽,使得gps信号无法进入浮标本体1,从而金属材料外壳需要外接天线。这样,采用绝缘体的浮标本体1能够进一步降低漂流浮标的成本。
57.作为一种具体的实施方式,以处理器模块为树莓派,定位模块为gps模块,通信模块为无线网卡为例,对漂流浮标进行详细说明。
58.树莓派的外设里面一共包含两个串口,包括硬件串口(/dev/ttyama0),和mini串口(/dev/ttys0)。硬件串口由硬件实现,mini串口默认分配给了排针引出的串口(引脚6、8与10)。
59.gps模块通过rs
‑
232(串行)接口与树莓派连接,定时向树莓派发送经纬度信息及对应的utc时间戳,具体的,gps模块的vin(电源正极)连接树莓派的第2引脚(5v),gps模块的gnd连接树莓派的第6引脚(gnd), gps模块的rx连接树莓派的第8引脚(tx),gps模块的tx连接树莓派的第 10引脚(rx)。无线网卡插入usb接口中。
60.将无线网卡插入usb接口后,通过如下命令生成配置文件wvdial.conf:
61.sudo wvdialconf
62.然后通过如下命令修改wvdial.conf:
63.sudo nano/etc/wvdial.conf
64.将配置文件wvdial.conf中的最后3行修改为:
65.phone=#777
66.password=card
67.username=card
68.即可通过命令“sudo wvdial”拨号联网。
69.以python 3作为编程语言为例说明。首先调用sleep函数延迟180秒,确保硬件就位,联网成功。然后,通过如下命令初始化串口:
70.comport=serial.serial("/dev/ttyama0",9600)
71.即可通过串口对象comport的readline函数读取定位信息,此处以“,”分隔的字符串(假设存入strgps中),其基本格式如下所示:
72.$gprmc,034846.000,a,1818.7033,n,10931.7576,e,0.10,107.45, 181118,d*6e\r\n
73.通过strgps.split(",")命令得到字符串数组unitgps,从而对定位信息进行解析。
74.unitgps[0]="$gprmc",表示定位信息的前导标识符;
[0075]
unitgps[1]="034846.000",utc时间,hhmmss.sss格式,加8小时为北京时间;
[0076]
unitgps[2]="a",状态,a=定位,v=未定位;
[0077]
unitgps[3]="1818.7033",纬度ddmm.mmmm,度分格式(前导位数不足则补0);
[0078]
unitgps[4]="n",纬度n(北纬)或s(南纬);
[0079]
unitgps[5]="10931.7576",经度dddmm.mmmm,度分格式(前导位数不足则补0);
[0080]
unitgps[6]="e",经度e(东经)或w(西经);
[0081]
unitgps[7]="0.10",速度,节,knots;
[0082]
unitgps[8]="107.45",方位角,度;
[0083]
unitgps[9]="181118",utc日期,ddmmyy格式;
[0084]
unitgps[10]="",磁偏角,(000
‑
180)度(前导位数不足则补0);
[0085]
unitgps[11]="",磁偏角方向,e=东w=西;
[0086]
unitgps[12]="d*6e\r\n",字段12:模式,a=自动,d=差分,e=估测, n=数据无效(3.0协议内容)。
[0087]
在对定位信息进行解析之前,需要对数据包进行校验,必须满足如下几个条件,才解析获取经纬度数据:
[0088]
unitgps[0]中的前导标识符必须为“$gprmc”,unitgps[2]中的状态信息必须为“a”(表示已经定位),整个数据包必须以“\r\n”结尾。另外,在“*”之前的所有字符的ascii码之和与“0xff”相与,并转换成对应的16进制字符串,结果必须与“*”之后的两个16进制字符相等,这样才能保证卫星定位的数据包有效。
[0089]
unitgps[3]和unitgps[5]中分别存有维度和经度的字符串格式的数值,以维度为例,需要截取纬度的整数部分“dd”字符串,转换为浮点数,这部分数据以“度”为单位;然后截取剩下的“mm.mmmm”,转换为浮点数,这部分数据以“分”为单位,需要处以60,转换为“度”。最后将两部分的“度”数相加,就得到最终的度数。
[0090]
unitgps[9]为“日日月月年年”格式的日期,unitgps[1]只要取整数部分的“时时分分秒秒”即可,加上由unitgps[5]得到的经度,由unitgps[3]得到的纬度,即可获取漂流浮标的实时位置。这些位置数据每过5分钟保存到一个时间相关的文本文件中,然后调用python的email包中的函数生成邮件,利用 smtplib包中的函数发送邮件。
[0091]
本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
[0092]
在本实用新型的描述中,需要理解的是,术语“纵向”、“径向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0093]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”应做广义理解。例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。固定连接可以为焊接、螺纹连接和加紧等常见技术方案。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0094]
以上,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的
保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

