一种蜂窝状的auv集群布放回收系统
技术领域
1.本发明涉及水下机器人回收控制领域,尤其涉及一种蜂窝状的auv集群布放回收系统。
背景技术:
2.自主式水下航行器(autonomousunderwatervehicle,auv)由于摆脱传统缆绳的牵绊,可有效的完成各种水下作业任务。目前已有很多不同种类的无人水下航行器应用到军事海洋技术、海洋科学技术考察、海底勘探、管路检修、海底打捞、油田勘探等多个工作领域。在很多情况下需要一次对多个auv完成回收。目前的auv回收主要有两种形式,一是利用抛绳器抛绳与auv舱体的绳子相互连接后,将auv拉至母船附近再通过起重机或者绞车完成对单个auv回收。二是母船放下小船后由人工驾驶靠近auv,而后通过人工挂钩等方式连接锁紧auv,最后通过母船吊装上船完成回收。这两种方式只能在水面完成对单个auv的回收,由于水面auv螺旋桨飞车等,传统方式无法完成auv的高效集群回收。
技术实现要素:
3.根据现有技术存在的问题,本发明公开了一种蜂窝状的auv集群布放回收系统,包括双体船,所述双体船的船身上固定连接有钢制框架,所述钢制框架上固定连接有绞车和集成线路箱,所述钢制框架通过滑轨与呈蜂窝状的auv回收舱相连接,所述双体船的船身上连接有在竖直面内呈上下左右活动的喇叭口装置,所述双体船的每个船身上都连接有吊舱螺旋桨;
4.所述auv回收舱包括容纳auv的舱体和滑轨,所述舱体的底部为舱底结构,所述舱体的内部固定连接有用于固定auv的锁紧装置,所述滑轨活动连接在钢制框架并在该钢制框架上进行上下运动,所述auv回收舱的后部固定连接有可升降式的防撞网;在回收阶段,当auv进入auv回收舱内所述防撞网将auv控制在网内,当布放阶段所述防撞网被绞车吊起后auv自行完成布放工作;
5.所述喇叭口装置包括电机、位于前部的喇叭口、位于喇叭口后部的筒状结构和丝杠,所述电机与丝杠相连接并驱动丝杠进行水平和竖直移动,所述丝杠的移动带动所述喇叭口运动;
6.所述舱底结构上设置有贯穿式凹槽,所述贯穿式凹槽的底部固定连接有用于加强凹槽强度的多个连接柱,所述舱底结构的内部设置有镂空结构。
7.所述锁紧装置采用弹性结构。
8.所述防撞网采用弹性柔性材料。
9.所述喇叭口和筒状结构为一体式结构。
10.由于采用了上述技术方案,本发明提供的一种蜂窝状的auv集群布放回收系统,该系统彻底改变单个auv回收方式,可在水下auv仍有动力的情况下完成对auv进行布放回收,其中auv回收舱可一次对多个auv完成布放回收工作,大大提高了auv的布放回收效率,并且
回收舱体以及锁紧装置、防撞网设计可最大限度的保护auv不受到损伤,并且在母船或者岸边即可完成整个auv的布放回收工作
附图说明
11.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
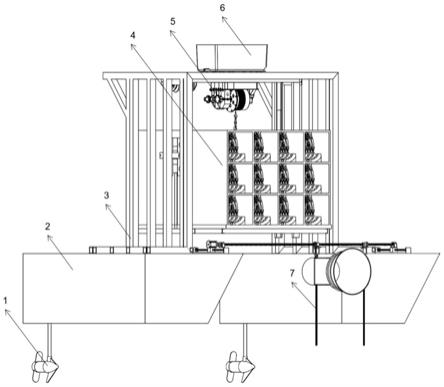
12.图1是本发明中蜂窝状的auv集群布放回收系统结构示意图。
13.图2是本发明中蜂窝状的集群式auv回收舱结构示意图。
14.图3是本发明中蜂窝状的集群式auv回收舱结构示意图。
15.图4是本发明中喇叭口装置结构示意图。
16.图5是auv回收舱中舱底和锁紧装置的结构示意图。
17.图6是auv回收舱中舱底和锁紧装置的结构示意图。
18.图7是本发明中锁紧装置加紧auv的结构示意图。
19.图8是水下auv集群布放回收装置进行auv布放回收过程的示意图。
20.图9是水下auv集群布放回收装置进行auv布放回收过程的示意图。
21.1、吊舱螺旋桨,2、双体船,3、钢制框架,4、auv回收舱,5、绞车,6、集成线路箱,7、喇叭口装置,4.1、舱体,4.2、舱底结构,4.4、滑轨,4.5、防撞网,7.1、电机,7.2、筒状结构,7.3、喇叭口,7.4、丝杠,4.2.1、贯穿式凹槽,4.2.2、连接柱,4.2.3、镂空结构。
具体实施方式
22.为使本发明的技术方案和优点更加清楚,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚完整的描述:
23.如图1
‑
图3所示的一种蜂窝状的auv集群布放回收系统,包括吊舱螺旋桨1、双体船2、钢制框架3、呈蜂窝状的集群式auv回收舱4、绞车5、集成线路箱6、喇叭口装置7。其中吊舱螺旋桨1位于双体船2的两侧,钢制框架3固定连接在双体船2的船身上,绞车5和集成线路箱6位于钢制框架3上。呈蜂窝状的集群式auv回收舱4通过滑轨和钢制框架3相互连接,喇叭口装置7通过电机丝杠和双体船2相互配合。所述的吊舱螺旋桨1可推动水下auv集群布放回收装置至合适的水面,绞车5可完成呈蜂窝状的集群式auv回收舱4的吊放,喇叭口装置7与呈蜂窝状的集群式auv回收舱4相互配合可有序的完成auv的集群回收。
24.进一步的,如图4至6所示,auv回收舱4包括舱体4.1、舱底结构4.2、锁紧装置4.3、滑轨4.4、可升降式的防撞网4.5。舱体结构4.2为镂空式设计可方便整个装置的出水入水,轻量化设计减轻了整体结构的重量。锁紧装置4.3为柔性设计,可有效的保护auv。
25.进一步的,喇叭口装置7包括电机7.1、位于前部的喇叭口7.3、位于喇叭口后部的筒状结构7.2和丝杠7.4,所述电机7.1与丝杠7.4相连接并驱动丝杠7.4进行水平和竖直移动,所述丝杠7.4的移动带动所述喇叭口7.3运动。
26.进一步的,舱底结构4.2上设置有贯穿式凹槽4.2.1,所述舱底结构4.2的中部设置有连接柱4.2.2,舱底结构4.2的内部设置有镂空结构4.2.3。贯穿式凹槽4.2.1和镂空结构
4.2.3减轻了整个装置的重量,同时利于呈蜂窝状的集群式auv回收舱的出水和入水。连接柱4.2.2用于加强舱底结构的强度。
27.锁紧装置4.3为弹性式设计,可有效的保护auv,锁紧装置4.3和舱底结构4.2完成对auv的夹紧和固定过程。
28.如图7至图8所示,本发明基于双体船2,双体船2两侧的吊舱推进器可实现与auv的主动配合工作状态下:在一个auv回收时,喇叭口后部的筒状结构7.2与舱底结构4.2对中后,操纵auv进入喇叭口装置7、通过喇叭口装置7使auv 8进入回收舱体4.2,锁紧装置4.3感应到auv完全进入后锁紧装置抓紧auv完成对auv的固定,其他auv回收时通过电机7.1和丝杠7.4的水平移动竖直移动和auv回收舱4的滑轨4.4上下移动可实现auv集群回收,将auv有序的回收于auv回收舱4,此时可升降式的防撞网4.5出于关闭状态,防撞网4.5的柔性设计可有效的保护auv。在全部回收工作完成后,绞车5吊起auv回收舱4内使其脱离水面,双体船2回到岸边或者母船。
29.在布放时双体船2行驶至合适的水面,绞车5放缆绳使auv回收舱4以及舱体内的auv在其自身的重力下可完全入水,舱底结构4.2的多处镂空式设计使入水更加容易,完全入水后绞车吊起可升降式的防撞网4.5,锁紧装置4.3完全张开,启动auv出舱完成对auv的布放工作。
30.auv回收舱4的凹槽设计和弹性摩擦表面设计可利用auv本身自重增大摩擦力同时舱体内的锁紧装置4.3可抓紧auv防止发生位移。喇叭口式设计降低了auv的回收难度。可升降式的防撞网4.5和auv回收舱4构成的空间可有效的保护auv,本装置基于双体船可实现与auv的主动对接,提高了对接精度。由于在水下完成在auv的集群布放回收,避免了auv在水面螺旋桨飞车,回收过程中auv仍保持有动力,相比于传统的水面单个auv回收方式更加高效、快速。
31.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

