1.本发明涉及在第一权利要求的前序部分中指定类型的锚固装置。
2.特别地,本发明涉及一种适于将漂浮物体(例如船或浮标)固定到可以漂浮或附接到地面的锚结构上的装置。因此,锚固装置可用于例如将船固定到漂浮或固定的码头。应当注意,为了简单和清楚起见,表述“锚固装置”也指系泊装置。
背景技术:
3.众所周知,为了固定船或其他漂浮物体,避免相对于某种结构的不期望的移动,可以进行锚固操作,其中使用锚,或涉及将绳索绑到缆柱的系泊/停靠操作。
4.通常,为了使锚结构具有更大的稳定性,使用了系泊弹簧(也称为弹簧或补偿器)。它由一个弹性体组成,该弹性体通过绳索或链条固定在船上,可以保护系泊免受波浪运动影响,从而确保船上更加舒适。
5.系泊弹簧可以由各种材料制成,例如钢、橡胶或热塑性材料。
6.这里描述的现有技术包括一些重要的缺点。
7.特别地,锚固装置,即绳索和系泊弹簧,难以调节,因此,如果不能很好地保持,它们可使漂浮物体相对于锚结构相当大地移动,并因此可能对漂浮物体和/或锚结构造成损坏。
8.此外,众所周知的锚固装置具有恒定的刚度和阻尼特性,这些特性通常会随天气条件、老化、腐蚀等而变化。
技术实现要素:
9.在此背景下,本发明的基础技术任务是设计一种锚固装置,该锚固装置能够基本上克服至少一些上述缺点。
10.作为所述技术任务的一部分,本发明的重要目的是获得一种易于调节的锚固装置,因此,该锚固装置能够将漂浮物体准确锚固至锚结构。
11.通过所附权利要求1中要求的锚固装置来实现技术任务和特定目的。在从属权利要求中描述了优选实施例的示例。
附图说明
12.通过以下参考附图对优选实施例的详细描述,可以阐明本发明的特征和优点,其中:
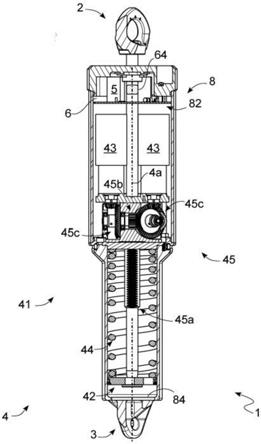
13.图1按比例示出根据本发明的锚固装置;
14.图2按比例示出图1的剖视图;以及
15.图3按比例示出锚固装置的组件。
具体实施方式
16.在本文档中,与“约”或其他类似术语(例如“大约”或“大致”)相关的度量、值、形状和几何参考(例如垂直度和平行度)应理解为除了由于生产和/或制造错误而导致的测量误差或不准确,尤其是除了与其相关的值、度量、形状或几何参考略有不同的情况。例如,这些术语如果与一个值相关联,则优选地表示不超过该值的10%的差异。
17.此外,当使用时,诸如“第一”、“第二”、“较高”、“较低”、“主要”和“第二”之类的术语不一定指顺序、优先级关系或相对位置,但是可以只是用来更清楚地区分不同的组件。
18.除非另有说明,否则本文中提供的测量和数据应视为在国际民航组织国际标准大气(iso2533)中进行的。
19.除非另有说明,如以下讨论所证明的那样,应该理解,诸如“处理”、“计算机”、“计算”、“评估”等之类的术语是指计算机或类似的电子计算设备的动作和/或过程,用于操作和/或处理表示为物理的数据,例如计算机系统日志和/或其存储器的电子大小,其他数据类似表示为计算机系统内部的物理量、日志或其他信息存储、传输或显示设备。
20.参考附图,数字1总体上表示根据本发明的锚固装置。
21.它适用于将漂浮物体(例如船或浮标)固定到锚结构(漂浮或附着到地面)上,从而允许漂浮物体和锚结构之间发生相对移动。
22.锚固装置1包括:适于固定到漂浮物体上的第一附件2;以及适于固定到锚结构上的第二附件3。
23.第一附件2可借助于绳索或其他合适的连接装置,例如链、金属电缆、杆或钩环(以下统称为绳索)固定到漂浮物体上。可替代地,其可以固定到漂浮物体上。
24.第二附件3可以借助于绳索固定到锚结构。可替代地,其可以牢固地固定到锚结构上。
25.所述附件2和3限定了可以完成和撤消的紧固。
26.锚固装置1包括用于在附件2和3之间以及因此在漂浮物体和锚结构之间的相对移动的阻尼构件4。
27.阻尼构件4包括限定滑动轴线4a的滑动腔室41;以及适于根据附件2和3之间的相对移动沿所述轴线4a在滑动腔室41中滑动的活塞42;以及适于阻尼活塞42在滑动腔室41中的滑动的至少一个阻尼器43。
28.活塞42附接到附件2或3中的一个,特别是附接到第一附件2。
29.滑动腔室41附接到与活塞42的附件不同的附件2或附件3,并且优选附接到第二附件3。
30.滑动腔室41可限定水密内部容积。活塞41的头部在内部容积的内部,并且杆部通过配备有密封装置的孔从头部部分地突出。
31.活塞42的滑动以及因此活塞42的位置限定了附件2和3之间的距离最小的阻尼构件4的收缩构型,以及附件2和3之间的距离最小的扩展构型。
32.阻尼构件4可方便地包括弹性装置44,弹性装置44适于与附件2和3之间的距离的变化相反地工作,特别是与从收缩构型到扩展构型的过渡相反地工作。
33.阻尼构件4可以包括至少一个运动机构45,运动机构45适于在运动学上连接活塞42和阻尼器43。构件4方便地包括用于阻尼器43的运动机构。
34.运动机构45是适于将活塞42的直线移动转换成在阻尼器43处的旋转移动的齿轮装置。
35.运动机构45可以相对于变速器方便地固定。
36.它可以包括沿着滑动轴线4a延伸的齿条45a;以及适于沿着齿条45a滑动的齿轮45b。
37.齿条45a可以附接到活塞42。
38.对于本领域技术人员而言,显而易见的是,如何用蜗杆或滚珠丝杠代替齿条。
39.齿轮45b可以附接到滑动腔室41上,并且可以由齿条45a控制旋转。
40.运动机构45可以包括适于与转子的旋转速度相乘的乘法器45c,从而实现了从低速(典型的波浪的速度)到高速移动的过渡。
41.阻尼构件4优选地包括至少一个电阻尼器43。所述阻尼器43是适于通过抵抗定子和转子之间的往复旋转来耗散能量的电动机。特别地,阻尼器43是无刷电动机。
42.应当指出,所述电动机,即阻尼器43,可以通过利用活塞42的滑动来产生能量。
43.阻尼器43附接到腔室41。
44.阻尼构件4方便地包括多个阻尼器43,其可以由所述至少一个齿轮45b控制。更方便地,阻尼构件4包括多个阻尼器43,每个阻尼器可以由齿轮45b控制;以及,特别地,包括三个阻尼器43和三个齿轮45b,它们中的每个都致动阻尼器43。
45.ep2705272在段落15.‑
[0108]和图1
‑
18(作为引用并入本文)中描述了阻尼构件4,尤其是锚固装置1的示例。
[0046]
锚固装置1可以包括至少一个电能转换器5。
[0047]
转换器5适于改变从阻尼器43输出的电的参数,从而允许使用外部装置和/或同一装置1。
[0048]
至少一个转换器5位于所述内部容积中。
[0049]
锚固装置1可以包括至少一个能量存储电池6,用于来自转换器5和/或阻尼器43的输出。
[0050]
电池6位于所述内部容积中。
[0051]
可选地,锚固装置1可以包括适于允许外部单元电连接到该装置的7个连接器。
[0052]
连接器在容积的外部,并且与电池6和/或转换器5电连接。
[0053]
锚固装置1可以包括用于同一装置1的操作的控制单元8。
[0054]
控制单元8可以包括用于测量活塞42的滑动的至少一个测量传感器81。
[0055]
特别地,至少一个测量传感器81适于测量以下至少之一:活塞42的滑动的速度(在模块中并且方便地朝向)和加速度(在模块中并且方便地朝向)。更具体地说,该传感器适于测量速度和加速度。
[0056]
至少一个测量传感器81可以适于以直接的方式测量活塞42的滑动。因此,可以通过测量活塞42沿着滑动轴线4a的移动和/或位置(例如,位置变化)来直接测量活塞42的滑动。至少一个测量传感器81可以测量齿轮45b的旋转和/或活塞头部42与滑动腔室41的基部之间的距离变化。
[0057]
该单元方便地具有用于每个齿轮45b的传感器81。
[0058]
作为替代或补充,至少一个测量传感器81可以通过测量阻尼器43的工作参数来间
接地测量活塞42的滑动。例如,至少一个测量传感器81可以测量阻尼器43的转子的旋转速度。
[0059]
控制单元8可以包括锚固装置1的控制板82。
[0060]
控制板82与阻尼器43并且方便地与转换器5和/或电池6数据连接,以便监测电能的产生和状态。
[0061]
控制板82与装置1中存在的一个或多个传感器进行数据连接。特别地,控制板82与测量传感器81进行数据连接。
[0062]
控制板82可以适于根据由测量传感器81测量的活塞42的滑动来改变阻尼器43的阻尼。更具体地,控制板82基于活塞42的速度和/或加速度来改变阻尼器43的阻尼。更具体地,控制板82根据优选地与活塞42的速度和/或加速度成比例地改变阻尼器43的阻尼。
[0063]
应当注意,在本文中,表述“基于”指对应于第二参数(在这种情况下为阻尼)的任何变化(增加或减少)的变化和例如第一参数(在这种情况下为活塞42的滑动速度)的增加;“根据”一词指分别对应于第二参数的增加或减少的第一参数的增加或减少。
[0064]
控制板82通过改变定子和/或转子处的磁极的磁参数来改变阻尼器43的阻尼,从而改变对转子旋转的反作用力。更具体地,板82控制参数的变化,诸如极性、磁强度和电负载电路模式。
[0065]
控制板82适于将活塞42的滑动速度保持在最小速度和最大速度之间。因此,例如,如果活塞42的滑动速度大于最大速度,则控制板82控制阻尼的增加,并且因此,阻尼器43更强烈地抵抗使活塞42的滑动减慢的速度。
[0066]
最小速度大致小于0.06m/s,并且更具体地,大致在0.06m/s与0.01m/s之间,并且优选地在0.05m/s与0.03m/s之间。方便地,其大致等于至少0.04m/s。
[0067]
最大速度大致大于0.04m/s,并且更具体地,大致在0.1m/s与0.04m/s之间,并且优选地在0.07m/s与0.05m/s之间。方便地,其大致等于至少0.06m/s。
[0068]
控制单元8可以包括至少一个第一力传感器83,其适于测量漂浮物体施加到第一附件2上的力。
[0069]
因此,控制板82可以基于在所述第一传感器83处的力的变化来测量漂浮物体上的外部负载的变化(例如,由于波浪或风)。
[0070]
控制单元8可以包括至少一个第二力传感器84,其适于测量由锚结构施加到第二附件3的力。
[0071]
因此,以相同的方式,控制板82可以基于所述第二传感器84处的力的变化,来测量例如由于漂浮物体相对于船体的移动而导致的锚结构上的外部负载的变化。
[0072]
控制板82可以基于并且优选地根据一个或多个力传感器83和84的所述测量值并且优选地与其成比例地改变阻尼器43的阻尼。
[0073]
控制单元8可以包括用于阻尼器43的监测系统,其适于测量阻尼器43的工作参数。
[0074]
监测系统可以适于测量阻尼器43的温度。
[0075]
监测系统可以适于测量阻尼器43的输出处的电流参数(例如安培数和/或电压)。
[0076]
控制单元8可以包括与控制板82数据连接的至少一个环境传感器组,其适于测量锚固装置1外部的环境参数。
[0077]
控制单元8可以包括第一波浪运动表征传感器组。所述第一传感器组可以包括一
个或多个第一环境传感器,每个第一环境传感器适于识别波浪的特性,例如电流的模量和方向,波浪的高度和频率。
[0078]
基于由所述第一传感器组收集的数据,控制板82可以改变阻尼器43的阻尼。控制板82优选地根据由第一传感器组收集的数据并且优选地与其成比例地改变阻尼器43的阻尼。
[0079]
控制单元8可以包括用于表征水状况的第二传感器组。所述第二传感器组可以包括一个或多个第二环境传感器,每个第二环境传感器都适于测量至少一个水参数,该水参数可以选自:温度、澄清度、水中污染物的存在、盐度、深度和鱼的存在。
[0080]
控制单元8可以包括第三空气表征传感器组。所述第三传感器组可以包括一个或多个第三环境传感器,每个第三环境传感器适于测量一个或多个空气参数,例如温度、光的暴露、空气中污染物的存在、模量和风向。
[0081]
应当注意,所述传感器组的各种传感器本身是已知的。
[0082]
最后,控制单元8可以包括测距仪。
[0083]
更具体地,控制单元8可以包括用于测量锚固装置1和漂浮物体之间的距离的第一测距仪;以及用于测量锚固装置1和锚结构之间的距离的第二测距仪。
[0084]
控制单元8可以包括适于识别锚固装置1的位置的地理定位器。
[0085]
锚固装置1可以包括数据连接装置,其适于允许在控制单元8和由于接收到由控制单元8收集的参数适于监测装置1的工作的外部单元之间进行数据交换,优选地是无线交换(使用wi
‑
fi、蓝牙和lora)。
[0086]
上述锚固装置1在结构上的工作如下。
[0087]
首先,锚固装置1通过第一附件2固定到漂浮物体(例如船或船只),并且通过第二附件3固定到锚结构。
[0088]
当由于波浪运动而在漂浮物体和锚结构之间存在相对移动时,该相对移动通过使附件2和3一起移动而导致活塞42沿着滑动轴线4a滑动,然后,致动阻尼器43以减弱漂浮物体和锚结构之间的移动。
[0089]
更具体地,活塞42的移动导致齿条45a滑动,从而导致齿轮45b旋转,该齿轮45b通过运动学连接机构激活阻尼器43,从而使转子旋转。
[0090]
由于定子上存在磁极,转子的这种旋转不仅会导致活塞的滑动变慢,还会使漂浮物体和锚结构之间的移动减弱,并产生可以用于运行装置1和/或为外部设备供电的电能。
[0091]
在控制板82借助测量传感器81测量到活塞42的速度为高于最大速度或低于最小速度的情况下,该控制板82分别控制阻尼器43的阻尼的增大或减小,使活塞42的速度处于期望的范围内。
[0092]
根据本发明的锚固装置1具有重要的优点。
[0093]
实际中,由于测量传感器81以及因此由于控制板82,控制板82能够监测阻尼器43的运行。特别地,锚固装置1通过作用于阻尼器能够改变活塞42的滑动速度,并且因此具有基于海况的基本适应性。
[0094]
实际中,通过基于活塞42的滑动并因此基于波浪运动来改变活塞42的滑动速度,该装置可以容易地调整阻尼器(即转子)的速度,从而将其保持在电力生产的最大效率范围。
[0095]
另外,该容量允许锚固装置1平稳地振荡,而与海和风的状态无关。
[0096]
应当注意,通过提供力传感器83和84进一步强调了该方面,力传感器83和84通过向控制板2提供附加信息而允许对锚固装置1以及因此对其振荡进行更优的控制。
[0097]
由于存在数据连接装置,一个优点是,通过将控制单元8收集的数据发送到外部单元,可以远程监测锚固装置1的运行(例如,进行预防性维护),并且/或允许知晓例如锚固在装置1上的漂浮物体的存在和状态或波浪运动趋势历史、海况等。
[0098]
本发明可以进行落入由权利要求书限定的发明构思的范围内的变化。在这种情况下,所有细节都可以用等效元件代替,并且材料、形状和尺寸可以根据需要选用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

