1.本公开涉及自动化技术领域,具体地,涉及一种更换装置及更换系统。
背景技术:
2.导向行走机构在制造业中应用非常普遍,例如在工业机器人领域,工业机器人七轴作为机器人行走机构,是六轴机器人除本体以外附加在外部可受控制的行走机构,实现一个机器人在两个工位之间游走。目前,大多数七轴采用轨道滚轮或滑轨滑块的方式作为导向行走机构,轨道滚轮式安装拆卸相对较容易,但存在精度低,与导轨配合不严密的缺点,工作噪音大,在恶劣环境下寿命较低。滑轨滑块方式的导向行走机构精度高且噪音小,但要求安装精度高,给安装工人作业带来困难。然而无论采用何种形式的导向行走机构,其维修都需要由人工实现,拆卸和安装时间较长,且需要停机停线,给正在作业的线体造成较大的麻烦。
技术实现要素:
3.本公开的第一个目的是提供一种更换装置,能够实现在线维修的目的,提高工作效率。
4.为了实现上述目的,本公开提供一种更换装置,用于更换导向行走机构中与导向件相配合的运动件,所述更换装置包括:
5.取放组件,用于与所述运动件连接;
6.推进机构,与所述取放组件连接,用于驱动所述取放组件以带动所述运动件行进至或者退出位于所述导向件的上方的工作位置;以及
7.升降机构,与所述取放组件连接,当所述运动件位于工作位置时,用于驱动所述取放组件以带动所述运动件靠近并贴合在所述导向件的上表面,或者带动所述运动件远离所述导向件的上表面以与所述导向件的上表面之间形成间隙。
8.可选地,所述取放组件包括用于与所述运动件连接的转轴,所述转轴构造为偏心轴,所述升降机构包括用于驱动所述偏心轴转动的旋转气缸。
9.可选地,所述取放组件还包括同轴地套设于所述转轴的外侧并能够带动所述转轴一起转动的轴套,所述转轴的一端露出于所述轴套以用于与所述运动件连接,所述旋转气缸的输出端与所述轴套连接。
10.可选地,所述轴套和所述转轴一体成型。
11.可选地,所述取放组件还包括用于容纳所述轴套和所述转轴的外壳,所述轴套的外周壁上沿周向设置有至少一个刀耳,所述外壳的内周壁沿周向设置有数量与所述刀耳相对应的用于供所述刀耳滑动的刀槽,所述刀槽的宽度与所述刀耳的宽度相适应,以限制所述轴套的轴向运动。
12.可选地,所述刀槽的端部形成有用于容纳所述刀耳的容纳部,所述容纳部在轴向上偏移于所述刀槽且大小与所述刀耳相适应,以限制所述轴套的转动。
13.可选地,所述刀耳包括沿所述轴套的径向方向布置的两个,所述刀槽的延伸长度配置成用于限制所述运动件升降的高度。
14.可选地,所述推进机构包括伸缩气缸,所述伸缩气缸安装在所述外壳上,以驱动所述外壳并带动所述轴套和所述转轴沿轴向运动。
15.可选地,所述旋转气缸通过连接板与所述伸缩气缸连接,以使得所述伸缩气缸在带动所述取放组件轴向运动的过程中,所述旋转气缸能够随着所述取放组件一起运动。
16.本公开的第二个目的是提供一种更换系统,包括:
17.导向行走机构,包括导向件和运动件,所述运动件能够沿着所述导向件的延伸方向运动;以及
18.更换装置,用于更换所述导向行走机构中的运动件,所述更换装置为上述的更换装置。
19.通过上述技术方案,通过推进机构和升降机构的相互配合,能够实现导向行走机构中运动件的自动化更换,在保证较高装配精度的同时,省去了人工的繁琐操作,此外,运动件的更换能够在载重情况下进行,从而无需停机停线,提高了导向行走机构维修的效率。
20.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
21.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
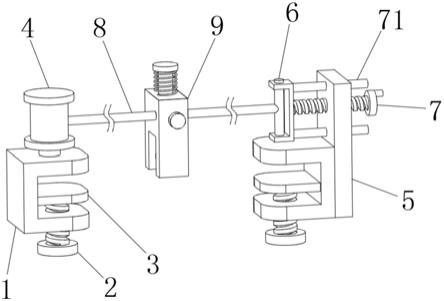
22.图1是本公开示例性实施方式提供的更换装置的半剖视图;
23.图2是本公开示例性实施方式提供的轴套的结构示意图。
24.附图标记说明
[0025]1‑
转轴,2
‑
轴套,21
‑
刀耳,3
‑
外壳,4
‑
轴承,5
‑
旋转气缸,6
‑
伸缩气缸,7
‑
连接板,8
‑
运动件,9
‑
导向件。
具体实施方式
[0026]
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
[0027]
在本公开中,在未作相反说明的情况下,使用的方位词如“上、下、左、右”通常是指以相应附图的图面方向为基准定义的。“内、外”是指相应部件轮廓的内和外。使用的术语“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。另外,下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。
[0028]
导向行走机构中通常具有导向件9和运动件8,导向件9布置成沿预设方向延伸的轨道状,运动件8配置成能够在导向件9上沿延伸方向运动,运动件8上可以设置有载板以承载并带动位于其上的装置(例如六轴机器人)行走。运动件8属于易损耗元件,磨损后影响导向行走机构的正常运行,需要对运动件进行更换。
[0029]
本公开提供了一种更换装置,如图1和图2所示,更换装置包括取放组件、推进机构和升降机构。取放组件用于与运动件8连接,并能够带动运动件8共同运动。为了描述方便,本公开以滚轮为例进行说明,应当理解的是,其他类型的运动件8,例如滑块同样能够被本
公开的更换装置所更换,其更换过程和原理均相同,对此本公开将不再额外赘述。需要指出的是,导向行走机构中的运动件8和导向件9不属于更换装置,此处仅作为使用环境特征进行描述,对更换装置的结构不产生实质性影响。
[0030]
推进机构和升降机构分别与取放组件连接。其中,推进机构用于驱动取放组件以带动运动件8行进至或退出位于导向件9上方的工作位置。当运动件8位于工作位置时,升降机构用于驱动取放组件以带动运动件靠近并贴合在导向件9的上表面,或者带动运动件8远离导向件9的上表面以与导向件9的上表面之间形成间隙。这里的“工作位置”是指升降机构能够工作以使运动件8贴合或者脱离导向件9的上表面的位置。
[0031]
通过上述技术方案,通过推进机构和升降机构的相互配合,能够实现导向行走机构中运动件8的自动化更换,在保证较高装配精度的同时,省去了人工的繁琐操作。具体来说,推进机构和升降机构都是自动化的机构,在工作的过程中无需人工参与,只需要按照事先设定好的路线和动作工作即可,并且相较于人工操作,自动化的工作方式装配精度更高。此外,运动件8的更换能够在线载重运行,相较于相关技术中,人工操作时需要停机并使用千斤顶等方式托起载重盘的方式,提高了导向行走机构维修的效率。
[0032]
作为能够实现取放组件带动运动件8升降的一种实施方式,取放组件可以包括用于与运动件8连接的转轴1,转轴1构造为偏心轴,升降机构包括用于驱动偏心轴转动的旋转气缸5。当运动件8为滚轮时,在转轴1和滚轮之间还可以设置有轴承4,轴承4固定在转轴1上以支撑滚轮的转动,减少摩擦。滚轮通过轴承4固定在转轴1上且与转轴1同心。由于转轴1为偏心轴,即转轴1的轴心和转动中心并不在同一条线上,这样,当偏心的转轴1转动时,随着轴心上下运动,固定在转轴1上的滚轮也随之上下运动。当转轴1的轴心运动到距离导向件9更近时,滚轮与导向件9的上表面相贴合,当转轴1的轴心运动到距离导向件9较远时,滚轮与导向件9的上表面分离。通过偏心转轴固有的特性,从而实现了运动件8的升降运动,相较千斤顶等方式,结构较为简单,易于操作。
[0033]
应当理解的是,本公开并不限制升降机构的具体实现形式,除了采用上述旋转气缸5与构造为偏心轴的转轴1相配合的方式以外,任何其他能够实现相同功能的结构或方法,均能够应用于本公开中,例如采用气动或者液压的方式直接顶升。
[0034]
当本公开的更换装置采用上述的旋转气缸5配合偏心转轴以驱动运动件8升降运动的方式时,进一步地,取放组件还可以包括同轴地套设于转轴1的外侧并能够带动转轴1一起转动的轴套2,转轴1的一端露出于轴套2以用于与运动件8连接,旋转气缸5的输出端与轴套2连接。轴套2可以与转轴1过盈配合或采用注塑等方式一体成型,这样,当旋转气缸5驱动轴套5转动时能够同时带动转轴1转动。外露于轴套2的转轴1的大小可以根据滚轮的宽度而具体设定,至少要等于滚轮的宽度以免滚轮从转轴1上滑脱。
[0035]
在本公开中,取放组件还可以包括用于容纳轴套2和转轴1的外壳3。轴套2的外周壁上沿周向设置有至少一个刀耳21,在图2示出的实施方式中,刀耳21包括沿轴套2的径向方向布置的两个。外壳3的内周壁沿周向设置有数量与刀耳21相对应的用于供刀耳21滑动的刀槽,刀槽的宽度与刀耳21的宽度相适应,以限制轴套2的轴向运动。换句话说,当刀耳21处于刀槽中时,轴套2只能作旋转运动,刀槽对轴套2的轴向具有限位作用。刀槽的长度配置成用于限制运动件8的升降的高度。举例来说,刀槽的长度可以配置成当刀耳21滑动到一端时,转轴1的轴心与导向件9的距离最近,而当刀耳21滑动到另一端时,转轴1的轴心与导向
件9的距离最远。可以通过对刀槽长度的配置,调节运动件8与导向件9之间能够形成的最大的距离。
[0036]
进一步地,刀槽的端部形成有用于容纳刀耳21的容纳部,容纳部在轴向上偏移于刀槽且大小与刀耳21相适应,以限制轴套2的转动。通俗来说,容纳部的存在为轴套提供了一个限位结构,由于容纳部的大小与刀耳21的大小相适应,当刀耳21置于容纳部中时,轴套2的轴向运动被卡止。容纳部与刀槽相连通,当壳体3轴向运动时,刀耳21能够在容纳部和刀槽来回切换,当刀耳21处于刀槽中能够允许轴套2转动以及轴套2随着壳体3共同轴向运动。
[0037]
推进机构可以包括伸缩气缸6,伸缩气缸6安装在外壳3上,以驱动外壳3并带动轴套2和转轴1沿轴向运动。随着伸缩气缸6的伸缩杆的伸出与缩回,能够带动外壳3沿轴向运动,进而带动壳体3内的轴套2和转轴1共同轴向运动,实现运动件8的推进或者退出。进一步地,旋转气缸5可以通过连接板7与伸缩气缸6连接,以使得伸缩气缸6在带动取放组件轴向运动的过程中,旋转气缸5能够随着取放组件一起运动,即旋转气缸5能够随着外壳3的轴向运动而共同运动。应当理解的是,在不影响驱动轴套2转动的功能的前提下,旋转气缸5是否被安装在外壳3上可以视实际需要而定。
[0038]
本公开的第二个目的是提供一种更换系统,包括导向行走机构和更换装置。导向行走机构包括导向件9和运动件8,运动件8能够沿着导向件9的延伸方向运动。更换装置为上述的更换装置,并具有上述更换装置的所有有益效果,此处不再赘述。
[0039]
在实际使用中,一套更换系统可以配备有至少两个更换装置。其中的一个用于更换备用运动件8,另一个用于取走已经出现磨损的运动件8。更换备用运动件8时,伸缩气缸6工作并带动套设有新的运动件8的取放组件行进至导向件9上方的工作位置,运动件8由于偏心的转轴1的作用而未与导向件9的上表面贴合,此时轴套2的刀耳21处于刀槽内,旋转气缸5工作,刀耳21在刀槽内滑动,偏心的转轴1带动运动件8转动使得直至运动件8与导向件9的上表面贴合,此时备用运动件8能够正常工作。将磨损的运动件8从导向件9上退出的过程与上述过程相反,此处不再赘述。
[0040]
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
[0041]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
[0042]
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。