技术特征:
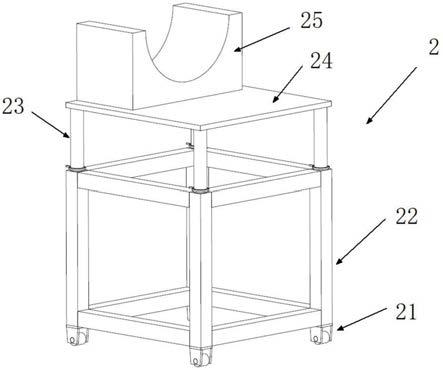
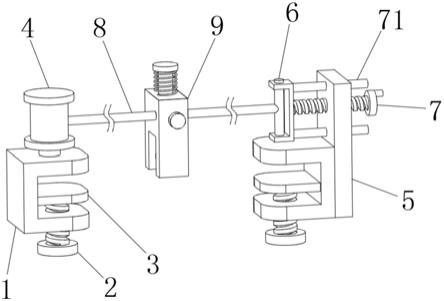
1.一种机器人加工用的多工位切割工作台,包括支撑柱(14),其特征在于,所述支撑柱(14)的上方通过螺栓安装有壳体(4),所述壳体(4)的外侧壁通过螺栓安装有pcl控制器(16),所述壳体(4)的外侧壁上开设有滑槽(10),所述壳体(4)的外侧壁贯穿安装有夹板(11),所述壳体(4)的上表面开设有滑道(6),所述壳体(4)的上表面开设有凹槽(5),且凹槽(5)位于滑道(6)的内侧,所述壳体(4)的上方贯穿安装有旋转机构(2),所述旋转机构(2)的上方固接有切割台(1),所述旋转机构(2)外套有螺纹块(8),所述螺纹块(8)的外侧壁上安装有框架(7),所述框架(7)的下方通过螺栓安装有行走轮(9),且行走轮(9)放置在滑道(6)的上表面,所述旋转机构(2)通过链条(13)固定有传动机构(3),且旋转机构(2)通过连接盘(15)固定有传动机构(3),所述传动机构(3)的下方连接有驱动电机(12),且驱动电机(12)通过螺栓安装在壳体(4)的下方。2.根据权利要求1所述的一种机器人加工用的多工位切割工作台,其特征在于,所述切割台(1)包括外壳(101),外壳(101)的内侧壁上固接有轴承座a(102),轴承座a(102)间传动连接有滑杆(103),滑杆(103)外套有滑块(104),滑块(104)的上方固定有橡胶板(105)。3.根据权利要求1所述的一种机器人加工用的多工位切割工作台,其特征在于,所述旋转机构(2)包括转轴a(201),转轴a(201)外套有齿轮a(202),转轴a(201)外套有轴承a(203),且轴承a(203)位于齿轮a(202)的下方,轴承a(203)外套有轴套a(204),轴套a(204)的下方传动固定有连接轴a(206),连接轴a(206)的下方安装有固定套a(205)。4.根据权利要求1所述的一种机器人加工用的多工位切割工作台,其特征在于,所述传动机构(3)包括转轴b(301),转轴b(301)的上方传动固定有轴承座b(303),转轴b(301)外套有齿轮b(302),转轴b(301)外套有轴承b(307),且轴承b(307)位于齿轮b(302)的下方,轴承b(307)外套有轴套b(304),轴套b(304)的下方传动固定有连接轴b(306),连接轴b(306)的下方安装有固定套b(305)。5.根据权利要求3所述的一种机器人加工用的多工位切割工作台,其特征在于,所述齿轮a(202)通过链条(13)连接有齿轮b(302),固定套a(205)外套有连接盘(15)。6.根据权利要求4所述的一种机器人加工用的多工位切割工作台,其特征在于,所述轴承座b(303)固接在壳体(4)的下方,转轴b(301)的下方连接有驱动电机(12)。
技术总结
本实用新型公开了一种机器人加工用的多工位切割工作台,涉及机器人切割配件技术领域,现有的切割工作台不能够同时运行工作,以及联动性较差,现提出如下方案,包括支撑柱,所述支撑柱的上方通过螺栓安装有壳体,所述壳体的外侧壁通过螺栓安装有PCL控制器,所述壳体的外侧壁上开设有滑槽,所述壳体的外侧壁贯穿安装有夹板,所述壳体的上表面开设有滑道,所述壳体的上表面开设有凹槽,且凹槽位于滑道的内侧,所述壳体的上方贯穿安装有旋转机构。本实用新型中转轴B上的齿轮B通过链条带动齿轮A转动,从而使得切割台进行转动,这样可以通过外壳转动,切割机器人不同的位置,且通过推动滑块,固定住机器人。固定住机器人。固定住机器人。
技术研发人员:唐志侠
受保护的技术使用者:上海锥墨自动化工程有限公司
技术研发日:2020.12.04
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。