1.本实用新型属于人体工学工程制造领域,应用于货物搬运、医疗护理、后勤保障等需要依靠人力进行物体搬运场所,具体涉及一种用于重载搬运的人体穿戴上肢外骨骼装置。
背景技术:
2.在一些特殊的工作场所需要人托举、持有、搬运或移动重物。对于进行该动作的工作人员,由于长期高强度的体力劳动,面临着由于肌肉损伤而造成体力负担加重的危险。大量的事实表明,长期频繁的搬运重物容易增加工作人员肩部肌肉损伤、腰椎劳损的风险。
3.外骨骼作为一种特殊的装置,其可以将人的智力与外骨骼装置进行完美的结合,具有非常广泛的应用价值:根据能量来源的不同,外骨骼通常可以被分为两种类型:无源外骨骼、有源外骨骼。
4.当前国内的无源外骨骼,通过机械结构自身对于穿戴者的手臂提供一个向上的托力,实现对于穿戴者手臂的力量辅助。但是,当人体手臂没有重物需要向下运动时,需要人体自身额外提供力量抵消机械结构对其手臂的向上推力。存在辅助力量小、灵活度低、人机协同性差的特点。
5.当前国内的有源外骨骼,通过传感器测得人体上肢运动情况,由控制模块驱动电机带动穿戴者的手臂进行运动,实现对于穿戴者手臂的力量辅助。但是,目前国内的上肢有源外骨骼采用欠自由度驱动,灵活度太低。难以满足人体上肢运动灵活运动的需要。
技术实现要素:
6.本实用新型的目的在于提供一种用于重载搬运的人体穿戴上肢外骨骼装置,以克服现有技术的不足。
7.一种用于重载搬运的人体穿戴上肢外骨骼装置,肩背板装置、宽度调节装置、肩关节装置和手臂驱动装置;
8.肩背板装置包括肩部贴板,肩部贴板上固定有肩背板转动关节和肩部转动关节,肩部贴板对称设置有两组宽度调节装置,每组宽度调节装置连接一组肩关节装置和手臂驱动装置;
9.宽度调节装置包括背部宽度调整机构和肩部宽度调整机构,背部宽度调整机构包括腰肩横杆,腰肩横杆一端与肩背板转动关节转动连接;肩背板转动关节包括肩部横杆,肩部横杆一端与腰肩横杆另一端转动连接;
10.肩关节装置包括万向节电机连接杆,万向节电机连接杆一端与肩部横杆另一端通过十字万向节连接;
11.手臂驱动装置包括电机,电机通过电机安装板固定于万向节电机连接杆的另一端,电机的输出轴固定有手臂托板,手臂托板和肩部贴板上均设置有绑带。
12.优选的,还包括高度调节装置,高度调节装置包括腰支撑杆件和腰调位杆件;腰支
撑杆件的一端与和腰调位杆件一端套接,腰支撑杆件的另一端固定有腰部贴片,腰部贴片上设置有固定带;肩部背板上固定有腰部旋转关节,腰调位杆件的另一端与腰部旋转关节转动连接。
13.优选的,肩背板转动关节和肩部转动关节均通过肩部背板固定于肩部贴板下端,肩部背板上固定有腰肩旋转关节,肩部贴板的上端通过腰肩部连接轴与腰肩旋转关节连接。
14.优选的,腰肩横杆一端通过背调节连杆与肩背板转动关节转动连接,背调节连杆竖直设置,腰肩横杆水平设置。
15.优选的,肩部横杆的一端通过肩调节连杆与肩宽转动关节转动连接。
16.优选的,手臂托板通过电机驱动执行板与电机的输出轴固定连接。
17.优选的,手臂托板与电机驱动执行板之间设有三维力传感器。
18.优选的,电机安装板上设置有电机运动限位槽,电机驱动执行板上设置有限位块,电机驱动执行板上的限位块受电机运动限位槽限位。
19.优选的,肩部背板、肩部贴板和腰部贴片均为弧形结构。
20.优选的,肩背板转动关节、肩部转动关节和肩宽转动关节均可采用轴承结构。
21.与现有技术相比,本实用新型具有以下有益的技术效果:
22.本技术一种用于重载搬运的人体穿戴上肢外骨骼装置,采用肩背板装置、宽度调节装置、肩关节装置和手臂驱动装置,肩关节装置和手臂驱动装置能够实现跟随人体手臂转动,将人体手臂力量转接到人体背部,采用有源的方式,在减轻整体装备质量的同时,具有适合人体运动的自由度分配,分担人体搬运重物时肩关节受到的重物带来的压力和力矩,本技术能够实现人体在弯腰搬运重物过程中的运动,分别满足人体肩关节的屈、伸、外展、内收、内旋、外旋六个动作,对人体搬运重物时的助力,降低人体肩部机构损伤,具有重要的意义。
23.优选的,肩部贴板上固定有肩背板转动关节和肩部转动关节,肩部贴板对称设置有两组宽度调节装置,每组宽度调节装置连接一组肩关节装置和手臂驱动装置,可形成双支撑辅助结构,实现对工人搬重物时进行较大力量辅助的目的,结构简单,穿戴方便。
24.优选的,利用高度调节装置,可将整体装置的重力分摊到人体腰部,进一步减轻肩部重力作用。
25.优选的,采用电机作为动力原件,一方面能够为穿戴者提供较大的力量辅助,另一方面有利于控制,满足高随动性的需要.
附图说明
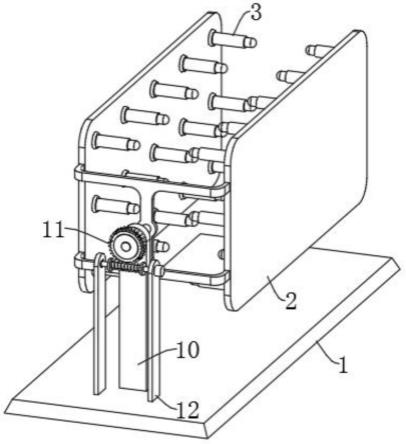
26.图1为本实用新型实施例中上肢外骨骼装置整体结构示意图。
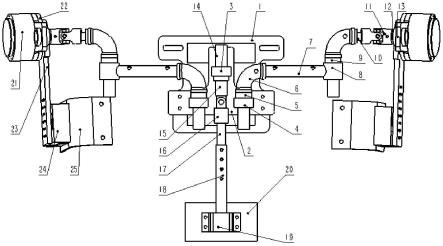
27.图2为本实用新型实施例中手臂驱动装置示意图。
28.图中,1.肩部贴板,2.肩部背板,3.肩背板转动关节,4.肩部转动关节,5.背调节连杆,6.腰肩弯管,7.腰肩横杆,8.肩宽转动关节,9.肩调节连杆,10.肩部横杆,11.十字万向节,12.万向节电机连接杆,13.电机安装板,14.腰肩部连接轴,15.腰肩旋转关节,16.腰部旋转关节,17.腰调位杆件,18.腰支撑杆件,19.腰调位杆件连接关节,20.腰部贴片,21.驱动电机,22.电机运动限位槽,23.电机驱动执行板,24.三维力传感器,25.手臂托板。
具体实施方式
29.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
30.需要说明的是,本实用新型的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本实用新型的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
31.以下结合附图和具体实施方式对本实用新型进行详细说明。
32.如图1所示,一种用于重载搬运的人体穿戴上肢外骨骼装置,包括肩背板装置、宽度调节装置、肩关节装置、手臂驱动装置、高度调节装置和摆动装置;
33.宽度调节装置通过背调节连杆5和肩部转动关节4的连接安装于肩背板装置的左右两侧;当不同肩宽的穿戴者穿上该设备时,装置通过背部宽度调整机构和肩部宽度调整机构,绕肩部转动关节4和肩宽转动关节8的转动,实现设备宽度的自动调整,满足各个肩宽人群的需要。肩关节装置通过十字万向节11和宽度调节装置中肩部横杆10和宽度调节装置连接在一起。当穿戴者的手臂进行摆动时,肩关节装置会跟随人的上臂进行摆动。手臂驱动装置通过电机21的输出轴与电机驱动执行板23和肩关节装置连接在一起。当电机21跟随人体的上臂进行运动时,手臂驱动装置进行工作,通过手臂托板25推动人体的手臂进行运动,达到力量辅助的目的。摆动装置和肩背板装置通过肩背板转动关节3和腰肩部连接轴14连接在一起。当穿戴者的腰部进行左右摆动时,摆动装置中的腰肩旋转关节会绕着腰部旋转关节转动,进而带动肩背板装置进行相应转动,实现设备整体左右倾斜。高度调节装置和摆动装置通过腰部旋转关节和腰调位杆件17连接在一起。通过对于高度调节装置中,腰调位杆件17和腰支撑杆件18之间对齐孔位置的调整,实现设备整体高度的调节,满足不同身高人群的使用。
34.所述肩背板装置包括肩部贴板1、肩部背板2、肩背板转动关节3和肩部转动关节4;肩部背板2和肩部贴板1之间通过螺钉进行连接,形成稳定的背负结构,肩部贴板1为弧形板,贴合人体背部,肩部贴板1上设置垫层;肩背板转动关节3通过螺钉或螺栓固定于肩部背板2上;肩部转动关节4通过螺钉或螺栓固定于肩部背板2上,肩部背板2上对称设置有两个肩部转动关节4;
35.所述宽度调节装置包括背部宽度调整机构和肩部宽度调整机构;
36.背部宽度调整机构包括背调节连杆5、腰肩弯管6、腰肩横杆7和肩宽转动关节8;背调节连杆5与肩部背板2上肩部转动关节4转动连接,腰肩横杆7一端与背调节连杆5的一端通过腰肩弯管6连接,当整体设备竖向放置时,背调节连杆5处于竖直状态,腰肩横杆7处于水平状态,腰肩弯管6作为腰肩横杆7与背调节连杆5的连接关节,腰肩弯管6分别与腰肩横
杆7和背调节连杆5通过螺纹连接,或者一体成型;腰肩横杆7作为水平转动的支撑杆,背调节连杆5作为水平转动轴;腰肩横杆7的另一端设置有肩宽转动关节8;
37.肩部宽度调整机构包括肩调节连杆9和肩部横杆10,肩调节连杆9与肩宽转动关节8转动连接,肩部横杆10的一端与肩调节连杆9一端固定连接,可采用弯管连接或者一体成型。
38.肩背板转动关节3、肩部转动关节4和肩宽转动关节8均可采用轴承结构,减小整体设备转动的阻力。
39.背部宽度调整机构对称设置于肩背板装置上左右两侧的肩部转动关节4上,每个背部宽度调整机构安装一组肩部宽度调整机构,背部宽度调整机构通过背部宽度调整机构上的肩宽转动关节8进行连接。
40.当不同肩宽的人穿戴该设备时,背部宽度调整机构和肩部宽度调整机构分别绕肩部转动关节4和肩宽转动关节8转动,带动肩关节装置的运动,使左右两侧电机安装板13的相对距离发生变化,并且和穿戴者的肩宽保持一致。
41.所述肩关节装置包括十字万向节11、万向节电机连接杆12和电机安装板13,十字万向节11、万向节电机连接杆12、电机安装板13和电机21组成一个三自由度机构,用于代替人体肩关节的内旋、外旋、外展、内收和屈伸运动。十字万向节11的一端和万向节电机连接杆12的一端通过销钉固定连接,十字万向节11的另一端固定于肩部横杆10一端,电机安装板13固定于万向节电机连接杆12的另一端,电机21固定于电机安装板13上;
42.如图2所示,所述手臂驱动装置包括电机21、电机运动限位槽22、电机驱动执行板23、三维力传感器24和手臂托板25;电机21固定于电机安装板12上,电机驱动执行板23和电机21输出轴固定连接,三维力传感器24和电机驱动执行板23通过螺钉连接,手臂托板25通过螺钉和三维力传感器24进行连接;手臂托板25能够与人体手臂贴合,利用电机驱动为人体手臂提供支撑力,可实现大角度范围的调节。当电机21驱动电机驱动执行板23进行运动时,手臂托板25推动人体的手臂进行上下运动,对于穿戴者上肢手臂进行力量辅助。为了避免电机运动超过人体肩关节生理极限对于人体所造成的伤害,电机安装板13上设置有电机运动限位槽22,电机驱动执行板23上设置有限位块,当电机21带动电机驱动执行板23运动到人体肩关节运动的极限位置时,电机驱动执行板23上的限位块受电机运动限位槽22限位,电机驱动执行板23会被电机运动限位槽22阻止继续运动,电机21驱动被动停止,避免了人体受伤;手臂托板25上设置有手臂固定带,用于将手臂托板25与人体手臂固定。
43.所述高度调节装置包括腰支撑杆件18和腰调位杆件17;腰支撑杆件18和腰调位杆件17套接,腰支撑杆件18和腰调位杆件17是两个不同直径、拥有相同孔眼分布的圆管,腰支撑杆件18下端固定腰部支撑组件吊耳19,腰部支撑组件吊耳19通过螺钉固定连接腰部贴片20上,腰部贴片20为弧形板,与人体腰部贴合。在实际使用中,穿戴者通过调节腰调位杆件17在腰支撑杆件18内的长度,实现对于穿戴设备高度的调节;肩部背板2上固定有腰部旋转关节16,腰部旋转关节16和调节杆件17一端转动连接。
44.肩部贴板1和腰部贴片20上均设置有背带孔,本技术附图中未给出背带结构,肩部贴板1和腰部贴片20通过背带穿戴于人体上,可采用背包背带结构,同时与腹部固定带一起使用。
45.所述摆动装置包括腰肩旋转关节15,腰肩旋转关节15固定于肩部背板2上,肩部贴
板1采用软材质,肩部贴板1上端通过腰肩部连接轴14与腰肩旋转关节15连接,肩部贴板1与腰肩部连接轴14一端固定,转动肩部贴板1,通过腰肩部连接轴14可相对肩部背板2发生转动;肩部背板2采用弧形板;当穿戴者的腰部进行左右摆动时,该机构会跟随穿戴者的腰部进行左右摆动,并带动肩背板装置进行相应的运动。
46.一种用于重载搬运的人体穿戴上肢外骨骼装置使用过程中具体工作流程,包括以下步骤:
47.a、人体弯腰搬重物。人体弯腰搬运重物的过程十字万向节11、万向节电机连接杆12、电机安装板13、电机21跟随人体肩关节转动。其中十字万向节11的两个转动轴跟随人体肩关节进行转动,电机根据人体手臂上下运动,为穿戴者的手臂提供力量。在电机21的驱动下手臂驱动装置托起穿戴者的手臂,将重物搬起。
48.b、人体搬重物起身。重物对于人体手臂向下的压力经过手臂驱动装置、肩关节装置传递到外骨骼左右宽度调节装置的肩部横杆10,肩部横杆10受到向下的载荷,该力会沿着宽度调节装置、肩背板装置、高度调节装置传递到人体的腰部。
49.本技术各关节均可采用轴承结构;本技术电机采用实拓ak80-64电机,质量轻,便于携带,减小整体装备的质量,本技术上肢外骨骼装置主体部分采用碳纤维材料,整体装备重量不超过10kg,可以满足各个年龄段不同身高、体重、肩宽人群的穿戴,上肢外骨骼采用电机作为动力原件,一方面能够为穿戴者提供较大的力量辅助,另一方面有利于控制,满足高随动性的需要;电源固定于肩部背板2上,通过在肩部背板2上设置电源仓,用于固定安装电源。
50.本技术结构简单,使用力传感器作为测量装置,当穿戴者的臂膀运动时,通过力传感器获得电机对于穿戴者手臂的实际辅助力,可基于外部辅助控制器对电机的驱动进行控制,如语音控制器对于电机进行控制,穿戴者穿戴玩车个后,将手臂托板25固定于手臂,然后对电机进行复位,可设置执行指定,如抬起或降落,以实现电机的控制;或者采用遥控控制电机的驱动;最终实现外骨骼与人体之间的高度协同性和对于手臂的较大力量辅助;在电源能量充足的情况下,可以实现连续的搬运。在一定范围内可进行尺寸的调节,以满足不同体型的工人穿戴。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。