1.本实用新型涉及机器人技术领域,尤其是一种用于移动机器人的串联弹性驱动器。
背景技术:
2.串联弹性驱动器(series elastic actuator,sea)主要是在驱动装置与末端执行器之间增加具有弹性和阻尼特性的装置,解除驱动装置和末端执行器之间的耦合关系,同时使串联弹性驱动器输出力与其形变量、相对速度成一定关系。与传统的刚性驱动器相比,串联弹性驱动器具有被动柔顺性、阻抗低、抗冲击、力感知精确等优点,己被广泛地应用于各种场合。
3.但是目前的串联弹性驱动器大多采用旋转型弹簧形成柔性驱动关节,或者采用伸缩杆型结构形成直线驱动,多应用于医疗领域如复健机器人、助行机器人等,并没有完全发挥出串联弹性驱动器的柔顺特性,而当前的串联弹性驱动器普遍尺寸较大,重量大,增加了机器人的电能消耗,导致了目前的串联弹性驱动器不能很好应用在四足移动机器人中。
技术实现要素:
4.为了解决上述问题,本实用新型提供一种用于移动机器人的串联弹性驱动器,结构简单、重量轻盈,适用于机器人的柔性控制。
5.为了实现上述目的,本实用新型采用的技术方案为:
6.一种用于移动机器人的串联弹性驱动器,包括固定座、驱动件、丝杆及储能弹簧,所述固定座包括驱动座及电机座,所述驱动座的一端与所述电机座的一端固定连接,所述驱动座的一面凹设有槽口,所述驱动件的底部位于所述槽口内,且所述驱动件的两侧分别与所述驱动座滑动连接,所述丝杆位于所述槽口内,所述丝杆螺纹穿设于所述驱动件,且所述丝杆的两端分别与所述驱动座转动连接,所述丝杆的一端穿入所述电机座内并与所述电机座转动连接,所述丝杆远离所述驱动座的一端固定设置有驱动电机,所述驱动电机与所述丝杆传动连接;
7.所述储能弹簧位于所述驱动座内远离所述电机座的一端,所述储能弹簧套设在所述丝杆外,且所述储能弹簧两端分别与所述驱动座内壁及所述驱动件外壁抵接。
8.进一步地,所述驱动件两侧分别固定设置有滑块,所述驱动座内两侧内壁分别凹设有与所述滑块滑动连接的滑槽。
9.进一步地,所述驱动件内两端的两侧分别设有回流槽,每一侧的所述回流槽均分别设有两个,每一侧的两个所述回流槽分别位于所述滑块的两侧,且所述回流槽一端与所述滑块导通连接,另一端设有导流孔,所述滑块相同一侧两端的两所述回流槽的导流孔通过导流管导通连接;所述回流槽及所述导流管内填充有润滑油。
10.进一步地,所述驱动件的两侧分别设有防尘盖,所述防尘盖一侧与所述驱动件固定连接,另一侧延伸至所述槽口的端面,以遮挡所述滑块与所述滑槽的缝隙。
11.进一步地,所述驱动件远离所述槽口的一面设有安装孔。
12.进一步地,所述驱动件沿滑动方向的两个端面分别固定设置有限位器。
13.进一步地,所述驱动座通过螺栓与所述电机座连接,所述驱动座的两侧设有贯穿的第一连接孔,所述电机座的两侧设有贯穿的第二连接孔,所述螺栓一端依次穿过所述第二连接孔及所述第一连接孔后螺纹套设有螺帽,以使所述螺栓及所述螺帽与对应所述电机座及所述驱动座抵接。
14.进一步地,所述丝杆两端分别通过第一轴承与所述驱动座连接,且所述第一轴承的内环与所述丝杆外壁固定连接,所述述第一轴承的外环与所述驱动座固定连接;所述丝杆穿入所述电机座的一端通过第二轴承与所述电机座连接,且所述第二轴承的内环与所述丝杆固定连接,所述第二轴承的外环与所述电机座固定连接。
15.本实用新型的有益效果是,
16.1.通过固定座作为四足移动机器人的大腿,而四足移动机器人的小腿与驱动座连接,在驱动电机的作用下,丝杆转动,以使驱动件沿着槽口滑动,从而实现四足机器人小腿的驱动。当驱动电机正转时,驱动件远离电机座的方向移动,同时储能弹簧被压缩变形,当驱动电机反转时,驱动件靠近电机座的方向移动,同时储能弹簧释放,使得驱动电机采用较低的扭矩能够驱动驱动件移动,在储能弹簧释放及压缩的过程中,储能弹簧提供弹性阻尼,从而实现四足机器人小腿的柔顺控制,避免机器人出现顿挫感。本实用新型的传动机构设置在固定座上,结构简单,结构简单、重量轻盈,适用于四足移动机器人的柔性控制,而通过减少重量而降低机器人的电能消耗,提高其能量应用效率以延长续航能力。而且驱动件为驱动方向为平面移动,从而使四足移动机器人适应多种应用场景。
17.2.由于回流槽一端与滑块导通连接,使得回流槽及导流管内的润滑油渗至滑块至滑槽之间的缝隙中,减少了驱动件的滑动阻力,使得四足机器人的行动更加顺畅。而且在防尘盖的作用下,以最大限度的保证了驱动件的移动不受外部环境干扰,确保四足移动机器人的稳定运动。
附图说明
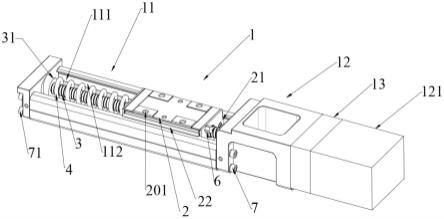
18.图1是本实用新型一较佳实施方式的用于移动机器人的串联弹性驱动器的结构示意图。
19.图2是本实用新型一较佳实施方式的用于移动机器人的串联弹性驱动器的驱动座结构示意图。
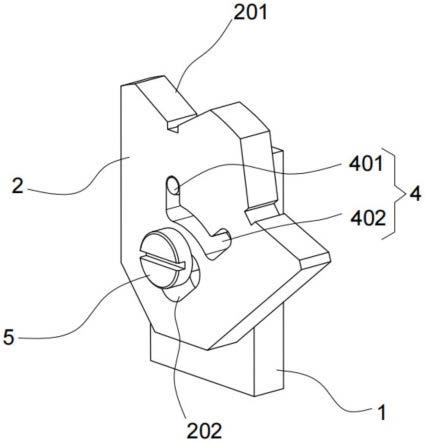
20.图3是本实用新型一较佳实施方式的用于移动机器人的串联弹性驱动器的驱动件结构示意图。
21.图4是图3的a-a处剖面图。
22.图中,1-固定座,11-驱动座,111-槽口,112-滑槽,12-电机座,121-驱动电机,122-联轴器,123-扭矩传感器,13-减速机,2-驱动件,21-滑块,22-防尘盖,31-第一轴承,32-第二轴承,4-储能弹簧,5-回流槽,51-导流管,6-限位器,7-螺栓,71-螺帽。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
26.请同时参见图1至图4,本实用新型一较佳实施方式的用于移动机器人的串联弹性驱动器,包括固定座1、驱动件2、丝杆3及储能弹簧4,固定座1包括驱动座11及电机座12,驱动座11的一端与电机座12的一端固定连接。
27.本实施例中,驱动座11通过螺栓7与电机座12连接,驱动座11的两侧设有贯穿的第一连接孔,电机座12的两侧设有贯穿的第二连接孔,螺栓7一端依次穿过第二连接孔及第一连接孔后螺纹套设有螺帽71,以使螺栓7及螺帽71与对应电机座12及驱动座11抵接。本实施例的固定座1每一侧均设有两个螺栓7及两个螺帽71。
28.驱动座11的一面凹设有槽口111,驱动件2的底部位于槽口111内,且驱动件2的两侧分别与驱动座11滑动连接。本实施例中的驱动件2远离槽口111的一面设有安装孔201,通过安装孔201能够使四足移动机器人的小腿安装至驱动件2上。
29.丝杆3位于槽口111内,丝杆3螺纹穿设于驱动件2,且丝杆3的两端分别与驱动座11 转动连接,丝杆3的一端穿入电机座12内并与电机座12转动连接,丝杆3远离驱动座11的一端固定设置有驱动电机121,驱动电机121与丝杆3传动连接。本实施例的驱动电机121 接入四足机器人的控制模块。驱动件2贯穿设置有螺纹孔,以使丝杆3能够螺纹穿设于驱动件2。
30.本实施例中,丝杆3两端分别通过第一轴承31与驱动座11连接,且第一轴承31的内环与丝杆3外壁固定连接,第一轴承31的外环与驱动座11固定连接;丝杆3穿入电机座12的一端通过第二轴承32与电机座12连接,且第二轴承32的内环与丝杆3固定连接,第二轴承 32的外环与电机座12固定连接。在第一轴承31及第二轴承32的作用下,能够使丝杆3稳定地转动,提高了丝杆3的支撑性,保证四足移动机器人的柔顺控制。
31.储能弹簧4位于驱动座11内远离电机座12的一端,储能弹簧4套设在丝杆3外,且储能弹簧4两端分别与驱动座11内壁及驱动件2外壁抵接。
32.通过固定座作为四足移动机器人的大腿,而四足移动机器人的小腿与驱动座11连接,在驱动电机121的作用下,丝杆3转动,以使驱动件2沿着槽口111滑动,从而实现四足机器人小腿的驱动。当驱动电机121正转时,驱动件2远离电机座12的方向移动,同时储能弹簧 4被压缩变形,当驱动电机121反转时,驱动件2靠近电机座12的方向移动,同时储能弹簧 4释放,使得驱动电机121采用较低的扭矩能够驱动驱动件2移动,在储能弹簧4释放及压缩的过程中,储能弹簧4提供弹性阻尼,从而实现四足机器人小腿的柔顺控制,避免机器人出现
顿挫感。
33.本实施例的传动机构设置在固定座1上,结构简单,结构简单、重量轻盈,适用于四足移动机器人的柔性控制,而能够降低机器人的电能消耗,提高其能量应用效率以延长续航能力。而且驱动件2为驱动方向为平面移动,从而使四足移动机器人适应多种应用场景。
34.本实施例的驱动座11尺寸为220mm
×
50mm,其中驱动件2尺寸为64mm
×
32mm,驱动件2行程为70mm。
35.如图3和图4所示,本实施例中,驱动件2两侧分别固定设置有滑块21,驱动座11内两侧内壁分别凹设有与滑块21滑动连接的滑槽112。
36.驱动件2内两端的两侧分别设有回流槽5,每一侧的回流槽5均分别设有两个,每一侧的两个回流槽5分别位于滑块21的两侧,且回流槽5一端与滑块21导通连接,另一端设有导流孔,滑块21相同一侧两端的两回流槽5的导流孔通过导流管51导通连接;回流槽5及导流管51内填充有润滑油。本实施例的回流槽5连通于滑块21靠近驱动件2的一侧。
37.由于回流槽5一端与滑块21导通连接,使得回流槽5及导流管51内的润滑油渗至滑块 21至滑槽112之间的缝隙中,减少了驱动件2的滑动阻力,使得四足机器人的行动更加顺畅。
38.驱动件2的两侧分别设有防尘盖22,防尘盖22一侧与驱动件2固定连接,另一侧延伸至槽口111的端面,以遮挡滑块21与滑槽112的缝隙。在防尘盖22的作用下,以最大限度的保证了驱动件2的移动不受外部环境干扰,确保四足移动机器人的稳定运动。
39.本实施例中,驱动件2沿滑动方向的两个端面分别固定设置有限位器6。限位器6为行程开关,且限位器6接入四足移动机器人的控制模块,当限位器6触碰到驱动座11时,控制模块控制驱动电机121以相反的方向转动,使得驱动件2能够沿着槽口111往复移动,从而实现了四足移动机器人的行走。
40.本实施例中,驱动电机121设有减速机13,减速机13一端与驱动电机121的固定连接,另一端与电机座12固定连接,且减速机13的输入端与驱动电机121传动连接,减速机13的输出端穿入电机座12内并通过联轴器122与丝杆3传动连接。本实施例驱动电机121通过减速机13间接对丝杆3做工。
41.减速机13的输出端设有扭矩传感器123,扭矩传感器123套设在减速机13的输出端外,且扭矩传感器123与电机座12内壁固定连接。扭矩传感器123位于减速机13输出端远离丝杆3的一端,联轴器122位于减速机13输出端靠近丝杆3的一端。
42.扭矩传感器123及驱动电机121与四足移动机器人的控制模块连接,且扭矩传感器123 能够获得减速机13的转动扭矩,从而获得丝杆3的转动扭矩。在储能弹簧4释放时,扭矩传感器123获得的扭矩数值降低,控制模块根据扭矩传感器123的扭矩调节驱动电机121的输出扭矩及驱动电机121输出功率。
43.由于驱动电机121功率一定的时候,其转速与扭矩成反比关系,在驱动电机121降低输出扭矩时,同时降低驱动电机121的功率,能够确保驱动电机121在保持恒定转速,实现了降低驱动电机121的做功,同时进步提高柔顺控制的效果。
44.本实施例的驱动件2控制过程为:驱动电机121通过减速机3驱动丝杆3正转,驱动件 2远离电机座12的方向移动,同时储能弹簧4被压缩变形。直至远离电机座12一端的限位器6被压下,控制模块控制驱动电机121通过减速机3驱动丝杆3反转,驱动件2靠近电机座12
的方向移动,同时储能弹簧4释放过程中,控制模块根据扭矩传感器123的数值调节驱动电机121的输出扭矩。当靠近电机座12一端的限位器6被压下,完成驱动件2完成了一个往复运动。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。