1.本实用新型涉及开卷落料线技术领域,尤其涉及一种多头激光落料线。
背景技术:
2.开卷落料线是目前汽车工业广泛应用的成套技术装备,开卷落料线是用来将卷料展开、矫平、经模具落料(冲裁)成板料并进行自动堆垛、包装后,配送给整车厂冲压线冲压成汽车车身所需要的零件。
3.现有技术中开卷落料线的最为显著的特点是通过模具落料(冲裁)来获得形状不规则的板料,因此,在开卷落料线的生产工艺中,一副模具通常只对应一个零件;也就意味着如果整车厂淘汰某个车型,那么这个车型所对应的落料模具基本上处于报废状态(仅仅用于售后服务);开发新车型,就必须开发新的落料模具。
4.现有技术存在的问题是:加工方式为冲裁,加工效率低,板料成型质量差,生产过程中存在噪音大的问题,还会有油污污染工作环境;生产线柔性化程度降低,建设落料线投资较大;针对新的产品需要设计新的冲裁模具,新产品的投放周期较长;冲压机构结构复杂,维护复杂,维护费用高。
技术实现要素:
5.本实用新型就是为了克服上述现有技术存在的缺点,提供一种多头激光落料线。本实用新型中使用激光切割机取代传统的冲压成型加工,配合设置的随动皮带机实现对板材的高效加工,在线尾皮带机的上方设置与码垛机器人配合的视觉定位系统,本落料线加工效率高,成品质量好,新产品投放周期短,激光切割机结构较简单,维护方便。
6.本实用新型解决其技术问题所采取的技术方案是:
7.一种多头激光落料线,包括切割机构、与切割机构进料端配合的开卷送料机构、与切割机构出料端配合的码垛机构,所述切割机构包括激光切割机、随动皮带机,所述随动皮带机设置在激光切割机的下方。
8.所述激光切割机包括纵向导轨、横向运动装置、切割头、支撑架,所述支撑架为开口向下的槽型结构,支撑架的两侧设有水平连接台,分别连接固定在随动皮带机的两侧,支撑架的上表面设有两个纵向导轨,组成激光切割机的y轴,所述横向运动装置设置在纵向导轨的上方,横向运动装置两端的下表面与纵向导轨滑动配合的滑块连接,组成激光切割机的x轴,所述横向运动装置上设有能够上下垂直运动的z轴,所述z轴的底部设有多个高功率光纤切割头。
9.所述激光切割机外设有防护罩,所述防护罩内设有抽风集尘器。
10.所述切割机构内部设置多个依次串联的激光切割机。
11.所述随动皮带机左端与所述开卷送料机构的伺服送料机连接,随动皮带机右端与所述码垛机构的排屑机连接,码垛机构的分拣机器人设置在随动皮带机末端的上方。
12.所述开卷送料机构的引料机后设有清洗机一,码垛机构的收料皮带机后设有清洗
机二。
13.所述码垛机构的线尾皮带机上方设有视觉定位系统,所述码垛机构的码垛机器人设置在线尾皮带机后。
14.所述切割头采用高功率光纤切割头。
15.本实用新型的有益效果是:
16.1.通过设置激光切割机取代传统的冲压成型机构,提高板件的切割加工效率,使用高功率光纤切割头,使零件直线度精度好(直线度小于0.05mm),不需要再进行精剪,降低了生产成本,提高了生产效率,降低了新产品研发的投入资金,加快了新产品的研发生产速度,使企业在市场竞争中处于有利地位。
17.2.通过使用激光切割机,节省了设计生产冲压模具的费用,也避免了产品生产结束后模具报废的情况,降低了生产成本。
18.3.激光切割机的结构包括支撑架和横向运动装置组成,安装方便,结构简单,便于工作人员的维修保养,降低了工作人员的劳动强度,减少投入资金,降低了生产成本。
19.4.在切割机构内部设置多个依次串联的激光切割机,采用自动套裁方式,提高对板材的利用率,可以根据厂房与生产线的长度决定激光切割机的数量,适用性广,提升了加工效率,提高了企业的经济效益。
20.5.在切割机构外设有防护罩,所述防护罩起到防护、封闭的作用,保持和维护切割环境,降低生产过程中的噪音,保障了生产线工作人员的安全,所述防护罩内设有抽风集尘器,能够及时对切割过程中产生的烟、粉尘进行处理,减少了废气的排放,提高了切割机构零部件的使用寿命。
21.6.通过清洗机一和清洗机二,对板材进行二次清洗,去除切割过程中产生的杂质,节省了后续清理板材的成本,提升了板料的品质,提高企业在市场中的核心竞争力。
22.7.通过在线尾皮带机的上方设置的视觉定位系统,提高了落料线的自动化程度,码垛机器人抓取板料更加精准,提高了码垛机构的工作效率。
附图说明
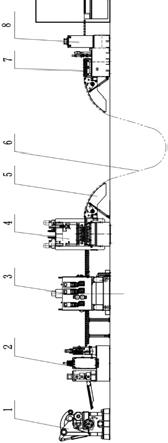
23.图1为本实用新型中实施例的结构示意图;
24.图2为本实用新型中开卷送料机构的结构示意图;
25.图3为本实用新型中切割机构的结构示意图;
26.图4为本实用新型中码垛机构的结构示意图;
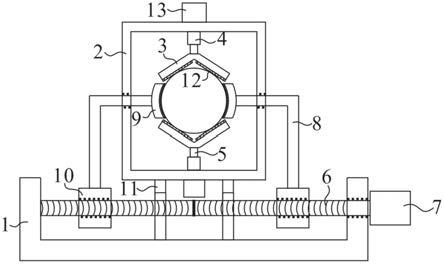
27.图5为本实用新型中激光切割机的结构示意图;
28.图6为本实用新型中图5的俯视结构示意图;
29.图7为本实用新型中码垛机器人及台车的俯视示意图;
30.图中,1、开卷机;2、引料机;3、清洗机一;4、矫平机;5、摆桥;6、板料;7、纠偏装置;8、伺服送料机;9、防护罩;10、随动皮带机;11、激光切割机;12、分拣机器人;13、排屑机;14、收料皮带机;15、清洗机二;16、视觉定位系统;17、线尾皮带机;18、码垛机器人;19、台车;20、纵向导轨;21、横向运动结构;22、高功率光纤切割头;23、支撑架。
具体实施方式
31.为了使本技术领域的人员更好地理解本实用新型中的技术方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
32.如图1-7所示,一种多头激光落料线,包括依次布置的开卷送料机构、切割机构和码垛机构,所述开卷送料机构的伺服送料机8与所述切割机构的随动皮带机10配合,所述随动皮带机10与码垛机构的排屑机13连接。采用激光切割机11提高了板件的切割加工效率,且零件直线度精度好(直线度小于0.05mm),不需要再进行精剪,降低了生产成本,提高了生产效率。
33.如图2所示,所述开卷送料机构包括依次布置的开卷机1、引料机2、清洗机一3、矫平机4、纠偏装置7和伺服送料机8,所述开卷机1设置在落料线的一侧,开卷机1用于放置并固定卷料,所述引料机2安装在开卷机1的输出端,所述清洗机一3安装连接在引料机2的输出端,所述矫平机4安装在清洗机一3的输出端,矫平机4和纠偏装置7之间设有摆桥5,纠偏装置7的输出端与伺服送料机8连接,板料6放置固定在开卷机1上,开卷机1对板料进行开卷操作,开卷后使用引料机2对板料进行导向输送,板料进入清洗机一3中进行清洗,随后通过矫平机4对清洗干净的板料进行矫直处理,保证板料的平行度,利于后续的加工,板料传送至纠偏装置7中进行导向的调整,通过伺服送料器8对板料稳定输送。
34.如图3所示,所述切割机构包括激光切割机11、随动皮带机10,所述随动皮带机10设置在激光切割机11的下部,一定长度的板料通过伺服送料机8输送到随动皮带机10上,随动皮带机10传动板料到激光切割机11下方,达到设定长度后停止输送,激光切割机11开始对板料进行切割。
35.如图4所示,所述码垛机构包括依次布置的分拣机器人12、排屑机13、收料皮带机14、清洗机二 15、视觉定位系统16、线尾皮带机17、码垛机器人18、台车19。
36.如图5、图6所示,所述激光切割机11包括纵向导轨20、横向运动装置21、高功率光纤切割头22、支撑架23,所述支撑架23设为开口向下的槽型结构,支撑架23两侧设有水平连接台,分别连接固定在随动皮带机10的两侧,支撑架23的上表面设有两个纵向导轨20,组成激光切割机11的y轴,所述横向运动装置21设置在纵向导轨20的上方,横向运动装置21两端的下表面与纵向导轨20滑动配合的滑块连接,组成激光切割机11的x轴,所述横向运动装置21上设有能够上下垂直运动的z轴,所述z轴的底部设有多个高功率光纤切割头22,此结构运行稳定,精密度高。
37.所述激光切割机11的x轴、y轴设有齿轮齿条传动机构,电机通过减速器连接齿轮齿条传动机构,实现横向运动装置21在纵向导轨20上的前后运动和z轴在横向运动装置21上的左右运动。
38.所述z轴上设有电机和滚珠丝杠副,通过电机带动滚珠丝杠副运动实现z轴的上下运动,电机与滚珠丝杠通过联轴器连接。
39.如图3所示,所述切割机构内部设置多个激光切割机11,采用自动套裁方式,提高对板料的利用率,可以根据厂房与生产线的长度决定激光切割机11的数量,适用性广,提升了加工效率,提高了企业的经济效益。
40.所述随动皮带机10的末端上部设有分拣机器人12。
41.所述随动皮带机10设有随动切割缝,所述皮带切割缝会跟随高功率光纤切割头22运动,从而对板料进行切割。
42.所述激光切割机11外设有防护罩9,所述防护罩9起到防护、封闭的作用,保持和维护切割环境,所述防护罩9内设有抽风集尘器26,能够及时对切割过程中产生的烟、粉尘进行处理,减少了废气的排放,提高了切割机构内部耗材的使用寿命。
43.如图4所示,所述分拣机器人12通过台车19将切割好的板材从随动皮带机10上拾取到收料皮带机14上。
44.所述随动皮带机10的右端设有排屑机13,分拣机器人12拾取成品板料后,随动皮带机10上的废料继续向前传送,直至落入排屑机13中,随后排屑机13将废料排出。
45.所述收料皮带机14后端与清洗机二15的进料口连接,成品板料通过收料皮带机14输送到清洗机二15中,清除切割产生的料渣等杂质。
46.所述清洗机二15的出料口与线尾皮带机17连接,所述线尾皮带机17后设有码垛机器人18,所述线尾皮带机17的上方设有视觉定位系统16,二次清洗后的板材通过线尾皮带机17传送到码垛机器人18前方,所述视觉定位系统16对线尾皮带机17上的板料进行精确定位,将位置信息传递给中控系统,以方便码垛机器人18精确抓取板料,码垛机器人18通过码垛端拾器将板料抓取至台车19上进行码垛。
47.本实用新型的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了描述本实用新型而不是要求本实用新型必须以特定的方位构造或操作,因此不能理解为对本实用新型的限制。本实用新型中的“相连”“连接”应作广义理解,例如,可以是连接,也可以是可拆卸连接;可以是直接连接,也可以是通过中间部件间接连接,对于本领域的普通技术人员而言,可以具体情况理解上述术语的具体含义。
48.以上所述为本实用新型的优选实施方式,具体实施例的说明仅用于更好的理解本实用新型的思想。对于本技术领域的普通技术人员来说,依照本实用新型原理还可以做出若干改进或者同等替换,这些改进或同等替换也视为落在本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。