一种纵横摆动五轴并联压电振动激光除锈机
一、技术领域:
1.属于清洁工业技术领域。
二、
背景技术:
2.激光清洗技术是利用激光光束,使污染物与基体之间的结合力受到破坏或者使污染物直接气化等方式进行脱污,降低污染物与基体的结合强度,从而达到洁净的工艺过程。当工件表面污染物吸收激光的能量后,其快速气化或瞬间受热膨胀后克服污染物与基体表面之间的作用力,受振动后从基体表面脱落。与传统的机械清洗法、化学清洗法和超声波清洗法不同,它不需要任何破坏臭氧层的有机溶剂,无污染,无噪声,对人体和环境无害,是一种绿色清洗技术,现在众多领域中逐步取代传统清洗工艺。
3.露天状态下,火车钢轨因刮风下雨等自然侵蚀生锈,容易在轨面生成锈迹,易造成轨道摩擦变大、轨道电路短路、轨道分路不清等危险,危及行车安全。因此,有效地解决钢轨轨面生锈和污染问题,对保障运输生产安全、提高铁路运输效率具有重大意义。本发明涉及一种纵横摆动五轴并联压电振动激光除锈机,结构简单,稳定性与灵活性都很好,操作简单,克服了传统方式的缺点。
三、
技术实现要素:
4.本实用新型专利涉及一种纵横摆动五轴并联压电振动激光除锈机,主要包括计算机控制箱,光纤激光器,纵横摆动五轴并联压电振动激光除锈机等。
5.一种纵横摆动五轴并联压电振动激光除锈机,它是可以安放在车底板上的激光清洗装置,利用车底板搭载配合智能计算机能够准确的定点清除需作业面。它主要包括上部分的计算机控制箱与激光器箱和下部分的纵横摆动五轴并联压电振动激光除锈装置,计算机控制箱与激光器箱包括:计算机控制箱,光纤激光器,连接光缆与电缆,通过连接光缆与电缆连接光纤激光器和光纤激光输出头,纵横摆动五轴并联压电振动激光除锈机包括:纵向并联单元、摆动并联单元、横向并联单元、压电振动器、光纤激光输出头、振镜、场镜和摄像头,其中纵向并联单元包括纵向并联定板,五根纵向数控伸缩杆,纵向并联动板,其中摆动并联单元,包括摆动并联定板,三根水平摆动数控伸缩杆,摆动并联动板,两根垂直摆动数控伸缩杆,其中横向并联单元,包括摆动并联动板,五根横向数控伸缩杆,横向并联动板。通过控制计算机发出相应的指令信号,将指令信号传递到纵横摆动五轴并联压电振动激光除锈装置上,实现在纵横摆动五轴并联的空间六自由度运动输出端上,叠加上压电振动,压电振动再驱动激光扫描头振动,最终实现五轴并联的空间六自由度运动矢量叠加压电振动矢量的激光二维扫描输出,实现对铁轨表面锈蚀的多空间运动的叠加压电振动激光清除。
6.内容一,设置计算机控制箱与激光器箱
7.设置计算机控制箱与激光器箱,计算机控制箱由计算机与电控箱组成,激光器箱由光纤激光器与电源组成,连接光缆与电缆,在列车车厢内安装计算机控制箱,在计算机控制箱前侧安装光纤激光器,其中光纤激光器用来输出激光。设置显示屏用于监控激光清洗
情况以及相关各种工作需求,设置主机内包含电源。设置连接光缆与电缆,将连接光缆与电缆上端连接在光纤激光器上,下端连接在光纤激光输出头上,其中计算机控制箱,光纤激光器均采用螺栓固定在列车车底板上。
8.内容二,设置纵横摆动五轴并联压电振动激光除锈装置
9.设置纵横摆动五轴并联压电振动激光除锈机,主要由纵向并联单元、摆动并联单元、横向并联单元、压电振动器、光纤激光输出头、振镜和场镜,摄像头等组成,其中,纵向并联单元的纵向并联定板固定在列车底板上,纵向并联单元的纵向并联动板与摆动并联单元的并联定板垂直连接,并且摆动并联单元的两根垂直摆动数控伸缩杆与纵向并联单元纵向并联动板连接,摆动并联单元与横向并联单元共用摆动并联动板,压电振动器固定在横向并联动板上,摄像头固定在横向并联动板上,振镜固定在压电振动器,光纤激光输出头与场镜都固定在振镜上。
10.内容三,设置控制器和驱动系统及其相关组件
11.在计算机控制箱内设置计算机与控制器,然后将从控制器引出的信号传输线接到光纤激光器上,在光纤激光器上安置连接光缆与电缆,通过连接光缆与电缆连接纵横摆动五轴并联压电振动激光除锈机上的光纤激光输出头,这样激光除锈硬件控制系统就完成了。通过摄像头实时监控并反馈到控制器,通过控制器内部编有的数控系统控制数控伸缩杆伸缩从而使得纵横摆动五轴并联压电振动激光除锈机按照规定方向运动,让光纤激光输出头达到指定位置进行激光清扫作业。
12.本发明的核心内容
13.1.一种纵横摆动五轴并联压电振动激光除锈机,设置计算机控制箱与激光器箱,计算机控制箱与激光器箱包括:计算机控制箱,光纤激光器,连接光缆与电缆,在计算机控制箱前侧安装光纤激光器,其中计算机控制箱和光纤激光器均采用螺栓连接固定在车底板上,并且将计算机控制箱和光纤激光器通过信号传输线连接起来。设置连接光缆与电缆,将连接光缆与电缆上端连接在光纤激光器上,光缆与电缆下端连接在光纤激光输出头上。设置纵横摆动五轴并联压电振动激光除锈机,包括:纵向并联单元、摆动并联单元、横向并联单元、压电振动器、光纤激光输出头、振镜和场镜,摄像头,其中纵向并联单元通过纵向并联定板固定在车底板上,纵向并联单元的纵向并联动板与摆动并联单元的摆动并联定板连接在一起,压电振动器固定在横向并联动板上,摄像头固定在横向并联动板上,振镜固定在压电振动器,光纤激光输出头与场镜都固定在振镜上。设置纵向并联单元,包括纵向并联定板,五根纵向数控伸缩杆,纵向并联动板,其中通过五根纵向数控伸缩杆将纵向并联定板与纵向并联动板连接起来。设置摆动并联单元,包括摆动并联定板,三根水平摆动数控伸缩杆,摆动并联动板,两根垂直摆动数控伸缩杆,其中通过三根水平摆动数控伸缩杆将摆动并联定板与摆动并联动板连接起来,通过两根垂直摆动数控伸缩杆将摆动并联定板与纵向并联动板连接起来。设置横向并联单元,包括摆动并联动板,五根横向数控伸缩杆,横向并联动板,其中通过五根横向数控伸缩杆将摆动并联动板与横向并联动板连接起来。
14.2.通过计算机发出除锈控制的指令信号,指令信号通过信号传输线传递给光纤激光器,进而通过光缆与电缆传递到纵横摆动五轴并联压电振动激光除锈机,纵横摆动五轴并联压电振动激光除锈机就会按照指令信号输出激光,同时摄像头会将采集到的视频信号传回计算机控制箱上,除锈的控制信号输入到纵横摆动五轴并联压电振动激光除锈机的数
控伸缩杆上,通过控制数控伸缩杆的伸缩从而使纵横摆动五轴并联压电振动激光除锈机运动,实现在纵横摆动五轴并联的空间六自由度运动输出端上,叠加上压电振动,压电振动再驱动激光扫描头振动,最终实现五轴并联的空间六自由度运动矢量叠加压电振动矢量的激光二维扫描输出,实现对铁轨表面锈蚀的多空间运动的叠加压电振动激光清除。
四、附图说明:
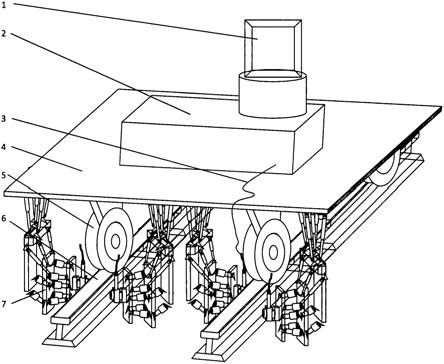
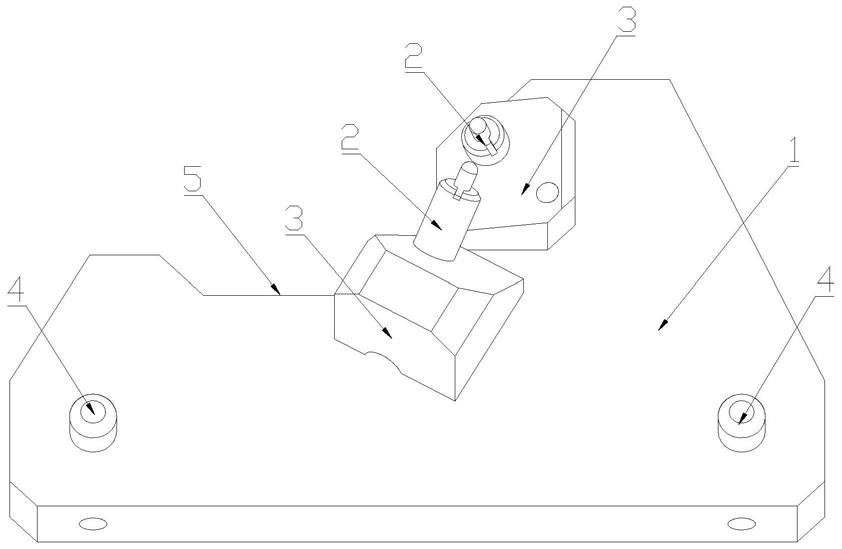
15.附图为发明的结构图,分别为:图1是一种纵横摆动五轴并联压电振动激光除锈机与车体整体结构图,图2是一种纵横摆动五轴并联压电振动激光除锈机结构图,其中分别为:1.计算机控制箱,2.光纤激光器,3.连接光缆与电缆,4.车底板,5.车轮,6.铁轨,7.纵横摆动五轴并联压电振动激光除锈机,8.纵向并联定板,9.纵向数控伸缩杆1,10.纵向并联单元,11.纵向数控伸缩杆2,12.纵向数控伸缩杆3,13.纵向数控伸缩杆4,14.纵向数控伸缩杆5,15.纵向并联动板,16.垂直摆动数控伸缩杆1,17.水平摆动数控伸缩杆1,18.垂直摆动数控伸缩杆2,19.水平摆动数控伸缩杆2,20.摆动并联单元,21.摆动并联定板,22.水平摆动数控伸缩杆3,23.横向并联单元,24.摆动并联动板,25.横向数控伸缩杆1,26.横向数控伸缩杆2,27.横向数控伸缩杆3,28.横向数控伸缩杆4,29.横向数控伸缩杆5,30.横向并联动板,31.压电振动器,32.光纤激光输出头,33.振镜,34.场镜,35.摄像头。
五、具体实施方式:
16.本发明的具体实施方式为:
17.设置计算机控制箱与激光器箱,包括:计算机控制箱1,光纤激光器2,连接光缆与电缆3,在计算机控制箱1前侧安装光纤激光器2,其中计算机控制箱1和光纤激光器2均采用螺栓连接固定在车底板4上,并且将计算机控制箱1和光纤激光器2通过信号传输线连接起来。设置连接光缆与电缆3,将连接光缆与电缆3上端连接在光纤激光器2上,光缆与电缆3下端连接在光纤激光输出头32上。设置纵横摆动五轴并联压电振动激光除锈机7,包括:纵向并联单元10、摆动并联单元20、横向并联单元23、压电振动器31、光纤激光输出头32、振镜33、场镜34和摄像头35,其中纵向并联单元10通过纵向并联定板8固定在车底板4上,纵向并联单元10的纵向并联动板15与摆动并联单元20的摆动并联定板21连接在一起,压电振动器31固定在横向并联动板30上,摄像头35固定在横向并联动板30上,振镜33固定在压电振动器31,光纤激光输出头32与场镜34都固定在振镜33。设置纵向并联单元10,包括纵向并联定板8,纵向数控伸缩杆9、11、12、13、14,纵向并联动板15,其中通过纵向数控伸缩杆9、11、12、13、14将纵向并联定板8与纵向并联动板15连接起来。设置摆动并联单元20,包括摆动并联定板21,水平摆动数控伸缩杆17、19、22,摆动并联动板24,垂直摆动数控伸缩杆16、18,其中通过水平摆动数控伸缩杆17、19、22将摆动并联定板21与摆动并联动板24连接起来,通过垂直摆动数控伸缩杆16、18将摆动并联定板21与纵向并联动板15连接起来。设置横向并联单元23,包括摆动并联动板24,横向数控伸缩杆25、26、27、28、29,横向并联动板30,其中通过横向数控伸缩杆25、26、27、28、29将摆动并联动板24与横向并联动板30连接起来。
18.工作过程:在工作过程中,一键启动计算机控制箱1,通过控制计算机发出相应的指令信号,指令信号通过信号传输线传递给光纤激光器2,进而通过光缆与电缆3传递到纵横摆动五轴并联压电振动激光除锈机7,纵横摆动五轴并联压电振动激光除锈机7就会按照
指令信号输出激光,同时摄像头35会将采集到的视频信号传回计算机控制箱1上,并且计算机控制箱1将数控信号输入到纵横摆动五轴并联压电振动激光除锈机7的纵向并联单元10、摆动并联单元20和横向并联单元23上,通过控制数控伸缩杆的伸缩从而使纵横摆动五轴并联压电振动激光除锈机7按照规定方向运动,当纵横摆动五轴并联压电振动激光除锈机7到达工作位置后,工作人员按下激光除锈设备启动按钮,使光纤激光器2和光纤激光输出头32电路接通,开始发出激光进行工作,实现在纵横摆动五轴并联的空间六自由度运动输出端上,叠加上压电振动,压电振动再驱动激光扫描头振动,最终实现五轴并联的空间六自由度运动矢量叠加压电振动矢量的激光二维扫描输出,实现对铁轨表面锈蚀的多空间运动的叠加压电振动激光清除。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。