1.本实用新型涉及滚焊机技术领域,具体为钢筋笼滚焊机全自动托笼架。
背景技术:
2.滚焊又称环缝焊,是用一对滚轮电极代替点焊的圆柱形电极,焊接的工件在滚盘之间移动,产生一个个熔核相互搭叠的密封焊缝将工件焊接起来的方法。一般采用交流脉冲电流或调幅电流,也可用三(单)相整流、中频、高频的直流电流。滚焊广泛应用于油桶、罐头罐、暖气片、飞机和汽车油箱、火箭、导弹中密封容器的薄板焊接。一般焊接厚度在单板3mm以内。
3.专利号zl201120283381.0公开了一种管桩滚焊机托笼架,该托笼架虽然能够方便的调节托笼架高度,但其调节时仍然需要人工调整定位销的位置,还不能实现全自动调节高度,同时不能对托笼架的角度进行自动调节,在焊接时,还需要人工对焊接角度进行调整,增加劳动力的付出,为此我们提出钢筋笼滚焊机全自动托笼架,解决以上提出的问题。
技术实现要素:
4.本实用新型的目的在于提供钢筋笼滚焊机全自动托笼架,具备自动调节托笼架高度和角度的优点,解决了传统的托笼架不能实现全自动调节高度和角度的问题。
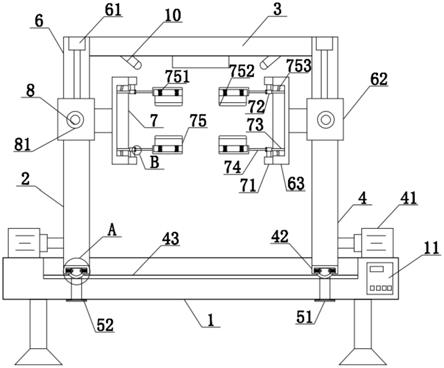
5.为实现上述目的,本实用新型提供如下技术方案:钢筋笼滚焊机全自动托笼架,包括工作箱,所述工作箱内腔的底部通过轴承活动连接有支撑柱,所述支撑柱内腔的底部固定连接有第一电机,所述第一电机的输出轴固定连接有螺纹杆,所述螺纹杆的表面螺纹连接有螺纹筒,所述螺纹筒的顶部贯穿工作箱并延伸至工作箱的外部且固定连接有托板,所述支撑柱的表面套设有从动齿轮,所述工作箱内腔底部的右侧固定连接有第二电机,所述第二电机的输出轴固定连接有主动齿轮,所述主动齿轮与从动齿轮啮合,所述托板的顶部放置有钢筋笼本体。
6.优选的,所述工作箱内腔顶部的两侧均嵌设有辅助伸缩杆,所述托板的底部开设有圈槽,所述圈槽内腔的两侧均滑动连接有滑座,所述滑座的底部与辅助伸缩杆固定连接。
7.优选的,所述工作箱底部的四周均固定连接有支腿,且支腿的底部通过转轴活动连接有行走轮。
8.优选的,所述支撑柱内腔的两侧均开设有滑槽,所述滑槽的内腔滑动连接有滑块,所述滑块远离滑槽的一端与螺纹筒固定连接。
9.优选的,所述工作箱内腔的顶部开设有通孔,所述螺纹筒位于通孔的内腔。
10.优选的,所述工作箱内腔底部的左侧固定连接有蓄电池,所述工作箱的右侧固定连接有推把。
11.与现有技术相比,本实用新型的有益效果如下:
12.本实用新型通过工作箱、支撑柱、第一电机、螺纹杆、螺纹筒、托板、从动齿轮、第二电机、主动齿轮和钢筋笼本体的设置,共同构建了一个钢筋笼滚焊机全自动托笼架,其中通
过支撑柱、第一电机、螺纹杆和螺纹筒的设置,能够推动托板向上移动,这时就能够对钢筋笼本体的高度进行自动调节,再通过从动齿轮、第二电机和主动齿轮的设置,能够带动支撑柱进行转动,从而实现自动对托板上钢筋笼本体的角度进行调节,从而可以更加方便滚焊机的焊接作业,以上结构的配合,解决了传统的托笼架不能实现全自动调节高度和角度的问题。
附图说明
13.图1为本实用新型结构示意图;
14.图2为本实用新型结构中工作箱的剖视图;
15.图3为本实用新型结构中支撑柱的剖视图;
16.图4为本实用新型结构中托板的俯视图;
17.图5为本实用新型结构中a的局部放大图。
18.图中:1、工作箱;2、支撑柱;3、第一电机;4、螺纹杆;5、螺纹筒;6、托板;7、从动齿轮;8、第二电机;9、主动齿轮;10、钢筋笼本体;11、辅助伸缩杆;12、圈槽;13、滑座;14、滑槽;15、滑块;16、通孔;17、蓄电池。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1
‑
5,钢筋笼滚焊机全自动托笼架,包括工作箱1,工作箱1内腔的底部通过轴承活动连接有支撑柱2,支撑柱2内腔的底部固定连接有第一电机3,第一电机3的输出轴固定连接有螺纹杆4,螺纹杆4的表面螺纹连接有螺纹筒5,螺纹筒5的顶部贯穿工作箱1并延伸至工作箱1的外部且固定连接有托板6,支撑柱2的表面套设有从动齿轮7,工作箱1内腔底部的右侧固定连接有第二电机8,第二电机8的输出轴固定连接有主动齿轮9,主动齿轮9与从动齿轮7啮合,托板6的顶部放置有钢筋笼本体10,通过工作箱1、支撑柱2、第一电机3、螺纹杆4、螺纹筒5、托板6、从动齿轮7、第二电机8、主动齿轮9和钢筋笼本体10的设置,共同构建了一个钢筋笼滚焊机全自动托笼架,其中通过支撑柱2、第一电机3、螺纹杆4和螺纹筒5的设置,能够推动托板6向上移动,这时就能够对钢筋笼本体10的高度进行自动调节,再通过从动齿轮7、第二电机8和主动齿轮9的设置,能够带动支撑柱2进行转动,从而实现自动对托板6上钢筋笼本体10的角度进行调节,从而可以更加方便滚焊机的焊接作业。
21.请参阅图2、图4和图5,工作箱1内腔顶部的两侧均嵌设有辅助伸缩杆11,托板6的底部开设有圈槽12,圈槽12内腔的两侧均滑动连接有滑座13,滑座13的底部与辅助伸缩杆11固定连接,通过辅助伸缩杆11的设置,能够对托板6进行高度调节时,进行辅助支撑,而圈槽12和滑座13的设置,能够对托板6进行角度调节时,进行限位移动。
22.请参阅图1和图2,工作箱1底部的四周均固定连接有支腿,且支腿的底部通过转轴活动连接有行走轮,通过行走轮的设置,能够方便使用者对其进行位置移动。
23.请参阅图3,支撑柱2内腔的两侧均开设有滑槽14,滑槽14的内腔滑动连接有滑块
15,滑块15远离滑槽14的一端与螺纹筒5固定连接,通过滑槽14和滑块15的设置,可以在螺纹杆4带动螺纹筒5转动时,对螺纹筒5进行限位移动,使得螺纹筒5在螺纹杆4的转动下,进行上下的移动。
24.请参阅图2,工作箱1内腔的顶部开设有通孔16,螺纹筒5位于通孔16的内腔。
25.请参阅图2,工作箱1内腔底部的左侧固定连接有蓄电池17,工作箱1的右侧固定连接有推把,通过蓄电池17的设置,能够对托笼架提供电力支撑,扩大使用范围。
26.使用时,先将钢筋笼本体10放置在托板6上,启动第一电机3带动螺纹杆4和螺纹筒5进行转动,而螺纹筒5与支撑柱2之间由于通过滑槽14和滑块15的限位移动,使得螺纹杆4转动时,能够带动螺纹筒5向上移动,从而能够推动托板6向上移动,这时就能够对钢筋笼本体10的高度进行自动调节,然后再启动第二电机8带动主动齿轮9进行转动,主动齿轮9带动从动齿轮7进行转动,而支撑柱2的底部通过轴承与工作箱1活动连接,使得从动齿轮7的转动,可以带动支撑柱2进行转动,从而实现自动对托板6上钢筋笼本体10的角度进行调节的目的,两者的配合使用,可以更加方便滚焊机的焊接作业,而第一电机3和第二电机8均为市面上常见的伺服电机,其型号为bh48
‑
60cb040c
‑
020000,维护成本较低。
27.本技术文件的控制方式是通过外设控制器来控制,控制器的控制电路通过本领域的技术人员简单电路连接即可实现,属于本领域的公知常识,并且本技术文件主要用来保护机械装置,所以本技术不再详细解释控制方式和电路连接。
28.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。