1.本实用新型涉及悬架平衡梁焊接技术领域,尤其涉及一种悬架平衡梁机器人焊接变位机。
背景技术:
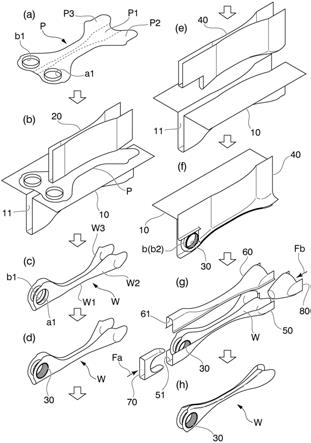
2.参见图1,悬架平衡梁工件4是一种较为常规机械衡梁工件,其主体构架包括弧板a、弧板a上的加强筋b,位于弧板a边缘部位的托板c,位于弧板a中心部位的撑板d,同心设置的撑套e以及侧板f等部位。
3.基于上述结构形式的悬架平衡梁工件4,其为异形结构。在焊接加工过程中,需要多角度将异形结构的悬架平衡梁工件4进行角度调节,便于暴露出焊接部位,并且采用机械人的机械焊接臂进行焊接。
4.而由于异形结构的悬架平衡梁,现有技术公开的机械式夹具,无法灵活的将悬架平衡梁工件4进行角度翻转调节,导致焊接机器人的焊接臂无法有效、灵活的接触到焊接点,进而焊接作业难度大,焊接效率极为低下。
技术实现要素:
5.基于上述背景,本实用新型的目的是提供一种悬架平衡梁机器人焊接变位机。
6.为实现以上目的,本实用新型采用以下的技术方案:
7.一种悬架平衡梁机器人焊接变位机,包括变位机底座,所述变位机底座的顶部转动连接有旋转立柱;
8.所述变位机底座内装配连接有驱动所述旋转立柱旋转的第一驱动机构;
9.所述旋转立柱上装配连接有焊接台;
10.所述旋转立柱内装配连接有驱动所述焊接台旋转的第二驱动机构;
11.所述第二驱动机构的动力输出端上具有旋转法兰;所述焊接台固定装配在旋转法兰的下端端面上;
12.所述焊接台包括固定装配在旋转法兰上的斜台部,所述斜台部的顶面水平,所述斜台部的顶面固定装配有水平夹具台部,所述水平夹具台部凸出斜台部的自由端;
13.所述水平夹具台部上装配连接有若干个定位悬架平衡梁工件的定位部件。
14.优选地,所述第二驱动机构包括装配连接在旋转立柱内上部伺服电机,所述上部伺服电机装配连接有上部rv减速机;
15.所述旋转法兰装配连接在上部的rv减速机的动力输出端。
16.优选地,所述第一驱动机构包括装配连接在变位机底座上的底部伺服电机,所述底部伺服电机装配连接有底部rv减速机;
17.所述底部rv减速机的动力输出端装配连接在旋转立柱的底部中心部位。
18.优选地,所述斜台部的纵向截面形状为三角形;
19.所述斜台部的底面为倾斜面。
20.优选地,所述水平夹具台部上装配连接有两个前后对称设置的定位部件,悬架平衡梁工件的左右两端分别定为在定位部件上。
21.优选地,所述定位部件均包括水平式夹钳,所述水平式夹钳铰接在水平夹具台部上。
22.优选地,所述水平式夹钳均包括固定在水平夹具台部上的钳座部以及铰接在钳座部上的钳臂部,通过所述钳臂部定位所述悬架平衡梁工件。
23.优选地,所述变位机底座的纵向截面形状为矩形。
24.本实用新型相比现有技术具有以下优点:
25.本实用新型公开一种悬架平衡梁机器人焊接变位机,通过设计变位机底座,所述变位机底座的顶部转动连接有旋转立柱;变位机底座内装配连接有驱动所述旋转立柱旋转的第一驱动机构;实现水平面上调节工件焊接角度;
26.通过设计旋转立柱上装配连接有焊接台;旋转立柱内装配连接有驱动所述焊接台旋转的第二驱动机构;第二驱动机构的动力输出端上具有旋转法兰;所述焊接台固定装配在旋转法兰的下端端面上。实现纵向平面上调节工件角度;
27.通过设计焊接台包括固定装配在旋转法兰上的斜台部,所述斜台部的顶面水平,所述斜台部的顶面固定装配有水平夹具台部,所述水平夹具台部凸出斜台部的自由端;水平夹具台部上装配连接有若干个定位悬架平衡梁工件的定位部件。实现将工件充分定位;
28.悬架平衡梁工件能够在水平面、纵向平面上进行角度翻转,进而焊接机器人的焊接臂能够轻易的接触到工件的焊接点,进而有效提高了焊接效率,降低了焊接作业的难度,提高了焊接的自动化程度。
附图说明
29.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其它的附图。
30.图1是本实用新型背景技术中悬架平衡梁工件的结构示意图;
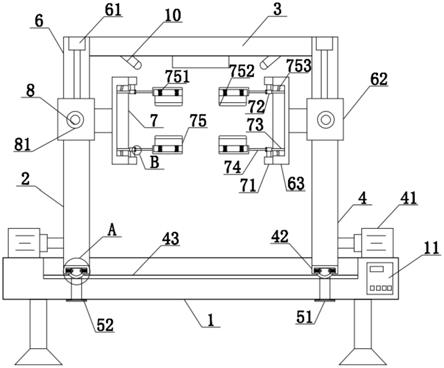
31.图2是本实用新型实施例中的整体结构示意图;
32.图3是本实用新型实施例图2中另一视角下的结构示意图。
33.图4是本实用新型实施例中焊接机器人焊接悬架平衡梁工件的姿势图之一;
34.图5是本实用新型实施例中焊接机器人焊接悬架平衡梁工件的姿势图之二。
具体实施方式
35.下面对本实用新型的实施例作详细说明,本实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
36.如图1
‑
3所示,一种悬架平衡梁机器人焊接变位机,包括变位机底座1(变位机底座1的纵向截面形状为矩形),所述变位机底座1的顶部转动连接有旋转立柱8。
37.具体是,变位机底座1内装配连接有驱动所述旋转立柱8旋转的第一驱动机构。通
过第一驱动机构驱动旋转立柱8携带悬架平衡梁工件4旋转,便于水平调节工件角度,便于焊接。
38.具体而言,第一驱动机构包括装配连接在变位机底座1上的底部伺服电机2,所述底部伺服电机2装配连接有底部伺服电机3;底部伺服电机3的动力输出端装配连接在旋转立柱8的底部中心部位。
39.同时,为了实现将工件在纵向平面上旋转,调节纵向平面上的角度,上述旋转立柱8上装配连接有焊接台6;旋转立柱8内装配连接有驱动所述焊接台6旋转的第二驱动机构。
40.具体而言,上述第二驱动机构的动力输出端上具有旋转法兰;所述焊接台6固定装配在旋转法兰的下端端面上。第二驱动机构包括装配连接在旋转立柱8内上部伺服电机9,所述上部伺服电机9装配连接有上部rv减速机7;旋转法兰装配连接在上部的rv减速机的动力输出端。
41.为了实现焊接台6平稳旋转,本实用新型改进现有焊接台6,具体采用如下结构设计:
42.焊接台6包括固定装配在旋转法兰上的斜台部,所述斜台部的顶面水平,所述斜台部的顶面固定装配有水平夹具台部,所述水平夹具台部凸出斜台部的自由端;具体是,斜台部的纵向截面形状为三角形;斜台部的底面为倾斜面。
43.采用上述结构设计的焊接台6,首先翻转的稳定性高,且焊接台6的灵活性大,能够稳固、灵活携带工件翻转。
44.悬架平衡梁工件4放置在水平夹具台部上,为了实现将工件定位,上述水平夹具台部上装配连接有若干个定位悬架平衡梁工件4的定位部件。
45.具体是,水平夹具台部上装配连接有两个前后对称设置的定位部件,悬架平衡梁工件4的左右两端分别定为在定位部件上。定位部件均包括水平式夹钳5,所述水平式夹钳5铰接在水平夹具台部上。水平式夹钳5(水平式夹钳5为现有工装夹具上常规用于定位工件的夹钳)均包括固定在水平夹具台部上的钳座部以及铰接在钳座部上的钳臂部,通过所述钳臂部定位所述悬架平衡梁工件4。
46.如图4、图5所示,利用水平式夹钳5将工件定位后,焊接过程中,在上述底部伺服电机3、上部rv减速机7及对应的伺服电机配合下,悬架平衡梁工件4能够在水平面、纵向平面上进行角度翻转,进而焊接机器人的焊接臂能够轻易的接触到工件的焊接点,进而有效提高了焊接效率,降低了焊接作业的难度,提高了焊接的自动化程度。
47.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。