1.本发明属于大型机外预调装卸平台技术领域,涉及一种多功能大型机外预调装卸平台。
背景技术:
2.对大型工件进行机加工时,需要将工件精准的固定安装在加工工位上,以便保证加工的安全度和精准度,这就需要大型机外预调装卸平台对工件进行机外预调装校准。
3.目前,一般是将用于定位和固定工件的工装安装在加工工位上,在加工之前,直接将工件安装在加工工位上,加工完毕后,再从加工工位上拆下工件,而在装卸工件的过程中,加工工位上的机床一直处于闲置状态,不能进行加工操作,从而严重影响加工效率。
技术实现要素:
4.鉴于现有技术中所存在的问题,本发明公开了一种多功能大型机外预调装卸平台,采用的技术方案是,包括旋转升降系统、工装系统、输送系统和校准系统,所述输送系统包括固定导轨和活动导轨,所述活动导轨位于两段所述固定导轨之间且与两段所述固定导轨共同形成完整平滑的第一导轨,所述活动导轨安装在所述旋转升降系统上;所述工装系统在所述活动导轨上移动,当所述工装系统位于所述活动导轨上时,所述旋转升降系统用于带动所述工装系统和所述活动导轨共同旋转或者升降;当所述工装系统位于目标位置时,所述校准系统用于对工件进行校准;通过旋转升降系统和工装系统,可以实现工件的升空校准,确保校准系统在不同位置和角度上完成对工件安装位置的校准,使工件达到精准安装,在完成校准后,配合活动导轨,可以将工件移动到固定导轨上,从而进一步通过固定导轨,将工件放入加工工位,实现了工件在加工工位之外的安装和校准,进入加工工位后,可直接进入到加工工序,解决了由于在加工工位上装卸工件,使机床处于闲置状态造成的加工效率低下的问题,同时,工件在校准前后,可以通过工装系统进入和离开旋转升降系统时进行位置移动,无需外界辅助系统,极大的节省了动力资源。
5.作为本发明的一种优选方案,所述工装系统包括托盘,当所述工装系统位于所述活动导轨上时,所述托盘的下表面通过第一零点快换定位夹具固定连接所述旋转升降系统,所述托盘的上表面通过第二零点快换定位夹具固定连接所述工件;采用的第一零点快换定位夹具和第二零点快换定位夹具,包括零点定位凹头和零点定位凸头,通过凹头和凸头配合使用,可以实现工件与托盘的快速定位和连接。
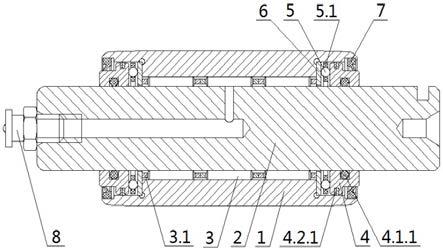
6.作为本发明的一种优选方案,所述托盘的下表面安装有滑轮,所述托盘前后两端圆周边缘对称设置有t型插槽,所述托盘的上表面中心设置有基板,所述基板的四个角分别安装有气动夹紧模块,所述基板上表面设置面板,所述基板与所述面板通过所述气动夹紧模块固定在一起。
7.作为本发明的一种优选方案,所述托盘上设置有定位模块和电子标签,所述定位模块用于获取所述托盘的定位信息,所述电子标签用于录入信息,采用定位模块将托盘的
位置信息发给系统,便于实现自动化定位。
8.作为本发明的一种优选方案,所述输送系统还包括第二导轨、推动小车和小车驱动机构,所述小车驱动机构用于驱动所述推动小车在所述第二导轨上移动,所述推动小车用于带动所述工装系统在所述第一导轨上移动,所述推动小车一边的中间部位设置有t型插件;采用这种t型结构,可以在推动小车推动托盘沿前后方向移动过程中,避免托盘和推动小车自动分离;还可以在推动小车将托盘推至活动导轨上,校准前托盘与活动导轨一起随着旋转升降系统下降时,托盘的t型插槽向下运动,能够自动与推动小车的t型插件分离,在校准后托盘与活动导轨一起随着旋转升降系统上升时,托盘的t型插槽向上运动,能够自动与推动小车的t型插件连接,通过t型插槽与t型插件的快速插拔,可实现推动小车与托盘的快速连接与分离。
9.作为本发明的一种优选方案,所述校准系统包括龙门架,所述龙门架上设置有三轴滑轨模组和校准仪器,所述校准仪器位于所述三轴滑轨模组上,且所述校准仪器通过所述三轴滑轨模组的运动实现定位。
10.作为本发明的一种优选方案,所述龙门架包括两个位于所述导轨两侧的门身以及一个横跨在两个所述门身上的横梁,所述三轴滑轨模组包括两个沿y轴方向设置的第一滑轨和配合滑动的第一滑块、沿x轴方向设置的第二滑轨和配合滑动的第二滑块、沿z轴方向设置的第三滑轨和配合滑动的第三滑块,两个所述第一滑轨分别位于两个所述门身上,所述横梁的两端分别位于两个所述第一滑块上,所述第二滑轨位于所述横梁上,所述第二滑块固定在中间板的一侧,所述第三滑块固定在所述中间板的另一侧,所述校准仪器位于所述第三滑轨上;通过第一滑轨、第二滑轨以及第三滑轨的配合,实现校准仪器分别在y轴、方向x轴以及z轴三个方向上的坐标调整。
11.作为本发明的一种优选方案,所述三轴滑轨模组还包括用于驱动第一滑块的第一伺服线性驱动电机、用于驱动第二滑块的第二伺服线性驱动电机以及用于驱动第三滑块的第三伺服线性驱动电机;采用伺服线性驱动电机,可以实心对三轴滑轨模组的精准控制。
12.作为本发明的一种优选方案,所述第一滑块上设置有安装板,所述第一伺服线性驱动电机位于所述安装板上,所述第二伺服线性驱动电机和所述第三伺服线性驱动电机均位于所述中间板上。
13.作为本发明的一种优选方案,所述旋转升降系统包括旋转升降台和驱动机构,所述活动导轨安装在所述旋转升降台上,所述驱动机构位于所述旋转升降台的下方;通过旋转升降台的旋转升降,可以带动活动导轨的旋转升降,从而实现对工件的升降与旋转,同时活动导轨与固定导轨连接闭合时,仍可形成一条光滑轨道,运输工件。
14.本发明的有益效果:本发明提供的多功能大型机外预调装卸平台,包括旋转升降系统、工装系统、输送系统、校准系统,所述输送系统包括固定导轨和活动导轨,所述活动导轨位于两段所述固定导轨之间且与两段所述固定导轨共同形成完整平滑的第一导轨,所述活动导轨安装在所述旋转升降系统上;当所述工装系统位于所述活动导轨上时,所述旋转升降系统带动所述工装系统和所述活动导轨共同旋转或者升降;当所述工装系统位于目标位置时,所述校准系统对工件进行调校。实现了工件在加工工位之外的安装和校准,解决了由于在加工工位上装卸工件,使机床处于闲置状态造成的加工效率低下的问题,而且,通过在旋转升降系统上设置活动导轨,以及通过活动导轨与固定导轨的拼接结构,可在工件校
准前后较容易的实现工装系统进入和离开旋转升降系统时进行位置移动,无需外界辅助系统,极大的节省了动力资源。
附图说明
15.图1为本发明的整体结构示意图;
16.图2为本发明的局部示意图;
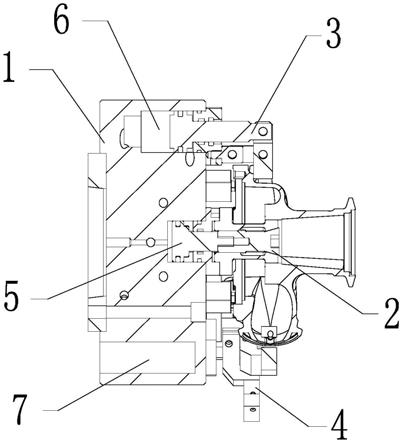
17.图3为本发明的旋转升降系统与输送系统的装配示意图;
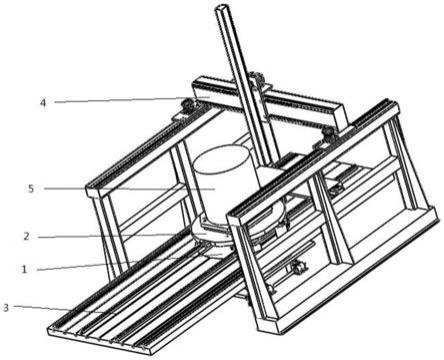
18.图4为本发明的校准系统示意图;
19.图5为本发明的校准系统局部图;
20.图6为本发明的工装系统示意图;
21.图7为本发明的托盘与推动小车之间的装配示意图。
22.图中:1
‑
旋转升降系统,2
‑
工装系统,3
‑
输送系统,4
‑
校准系统,5
‑
工件,6
‑
气动夹紧模块,7
‑
插槽,8
‑
插件,9
‑
基板,10
‑
面板,101
‑
旋转升降台,102
‑
驱动机构,201
‑
托盘,202
‑
滑轮,301
‑
固定导轨,302
‑
活动导轨,303
‑
第一导轨,304
‑
推动小车,305
‑
小车驱动机构,306
‑
第二导轨,401
‑
门身,402
‑
横梁,403
‑
第一滑轨,404
‑
第一滑块,405
‑
第二滑轨,406
‑
第二滑块,407
‑
第三滑轨,408
‑
第三滑块,409
‑
中间板,410
‑
第一伺服线性驱动电机,411
‑
第二伺服线性驱动电机,412
‑
第三伺服线性驱动电机。
具体实施方式
23.实施例1
24.如图1至图7所示,本发明所述的一种多功能大型机外预调装卸平台,采用的技术方案是,包括包括旋转升降系统1、工装系统2、输送系统3和校准系统4;所述输送系统3包括固定导轨301和活动导轨302,所述活动导轨302位于两段所述固定导轨301之间且与两段所述固定导轨301共同形成完整平滑的第一导轨303,所述活动导轨302安装在所述旋转升降系统1上;所述工装系统2在所述活动导轨302上移动,当所述工装系统2位于所述活动导轨302上时,所述旋转升降系统1用于带动所述工装系统2和所述活动导轨302共同旋转或者升降,当所述工装系统2位于目标位置时,所述校准系统4用于对工件5进行校准;在无需进行工件5调校时,活动导轨302与固定导轨301位于同一平面上,且共同连接成一条平整光滑的完整导轨,当需要对工件5进行调校时,工装系统2被输送至活动导轨302上,然后启动旋转升降系统1,工装系统2和活动导轨302跟随旋转升降系统1下降,到达一定高度后比如工件5校准时需要的最低高度,旋转升降系统1可旋转到不同的角度,保证校准系统4在不同的位置和角度上完成对工件5安装位置的校准,使工件5达到精准安装。采用本发明提供的平台,可对直径3000mm,高度1600mm内的任意工件5进行校调。调校完成后,再次启动旋转升降系统1,使其带动工装系统2与活动导轨302上升,至活动导轨302与固定导轨301平齐处于同一平面上形成一条完整平滑的导轨,然后,工装系统2可从活动导轨302上移出,进入固定导轨301,从固定导轨301上进入加工工位。
25.所述旋转升降系统1包括旋转升降台101和驱动机构102,所述活动导轨302安装在所述旋转升降台101上,所述驱动机构102位于所述旋转升降台101的下方,其中,旋转升降台101包括工作台,工作台的下部连接有升降顶杆,升降顶杆可设置为一个且位于工作台的
中心,也可以设置为多个且在工作台的下方均匀分布,各升降顶杆可以分别由独立的驱动机构102驱动,也可以统一由一个驱动机构102驱动,当由多个驱动机构102驱动时,所有的驱动机构102同步工作。其中,升降顶杆的驱动机构102可以采用液压驱动机构也可以采用电动驱动机构,在使用过程中,通过驱动升降顶杆上升或下降,可以带动工作台及工作台的上的组件上升或下降,同时,工作台上设置有转轴,转轴上设置有转台,其中,转轴可以设置在工作台的中心,也可以设置为多个且均布在工作台的四周,各转轴可以分别由独立的驱动机构102驱动,也可以统一由一个驱动机构102驱动,当由多个驱动机构102驱动时,所有的驱动机构102同步工作。转轴的驱动机构102可以采用电动驱动机构,在使用过程中,通过驱动转轴转动,可以带动与转轴连接的转台及其上的组件发生转动。本实施例中,活动导轨302设置在转台上,则活动导轨302可以随着转轴的作用下发生旋转,可以在升降顶杆的作用下上升或下降,从而使得位于活动导轨302上的安装有工,5的工装系统2上升或下降或旋转。
26.所述工装系统2包括托盘201,当所述工装系统2位于所述活动导轨302上时,所述托盘201的下表面通过第一零点快换定位夹具固定连接所述旋转升降系统1,所述托盘201的上表面通过第二零点快换定位夹具固定连接所述工件5,其中,所述第一零点快换定位夹具、第二零点快换定位夹具,具体包括零点定位凹头采用气动或油动夹紧模块和零点定位凸头采用高强拉钉,凹头和凸头配合使用,实现快速工件的快速定位和连接;
27.所述托盘201的下表面安装有滑轮202,所述托盘201前后两端圆周边缘对称设置有t型插槽7,所述托盘201的上表面中心设置有基板9,所述基板9的四个角分别安装有气动夹紧模块6,所述基板9上表面设置面板10,所述基板9与所述面板10通过所述气动夹紧模块6固定在一起,其中,所述气动夹紧模块6的开口外露出所述基板9上表面,同时在基板9内部埋设与所述气动夹紧模块6连接的通气管道,所述基板9外侧壁上设气动开关;与所述气动夹紧模块6配合使用的拉钉设置在所述面板10上;
28.所述托盘201上设置有定位模块和电子标签,所述定位模块用于获取所述托盘201的定位信息,所述电子标签用于录入信息;在托盘201上安装电子标签,可以在该电子标签中录入一些工件5加工的任务信息和工件5的编号等,待托盘201到达目的位置后,通过读取电子标签中的信息,获取工件5的编号以及加工任务信息。
29.所述输送系统3还包括第二导轨306、推动小车304和小车驱动机构305,所述小车驱动机构305用于驱动所述推动小车304在所述第二导轨306上移动,所述推动小车304用于带动所述工装系统2在所述第一导轨303上移动,所述推动小车304一边的中间部位设置有t型插件8;采用上述结构可以使用推动小车304推动工装系统2,使工装系统2能够在导轨上移动,比如,在进行工件5校准之前,推动小车304可以将工装系统2从固定导轨301推动到活动导轨302上,然后通过旋转升降系统1带动工装系统2与活动导轨302一同进行下降或旋转运动,使工装系统2到达工件5时可进行校准操作的目标位置,在对工件5校准之后,旋转升降系统1带动工装系统2与活动导轨302一同上升至活动导轨302的初始位置,推动小车304又可以将工装系统2从活动导轨302推动至下一段固定导轨301上,而且可以进一步将工装系统2推动到下一工序,在此过程中,第二导轨306上设置有与其延伸方向相同的齿条,推动小车304的车体底部设置有齿轮,通过齿轮可与齿条配合作用,以精确控制推动小车304的位置,进而精确控制工装系统2的位置。
30.所述校准系统4包括龙门架,所述龙门架上设置有三轴滑轨模组和校准仪器,所述校准仪器位于所述三轴滑轨模组上,且所述校准仪器通过所述三轴滑轨模组的运动实现定位;
31.所述龙门架包括两个位于所述导轨两侧的门身401以及一个横跨在两个所述门身401上的横梁402,所述三轴滑轨模组包括两个沿y轴方向设置的第一滑轨403和配合滑动的第一滑块404、沿x轴方向设置的第二滑轨405和配合滑动的第二滑块406、沿z轴方向设置的第三滑轨407和配合滑动的第三滑块408,两个所述第一滑轨403分别位于两个所述门身401上,所述横梁402的两端分别位于两个所述第一滑块404上,所述第二滑轨405位于所述横梁402上,所述第二滑块406固定在中间板409的一侧,所述第三滑块408固定在所述中间板409的另一侧,所述校准仪器位于所述第三滑轨407上;
32.所述三轴滑轨模组还包括用于驱动第一滑块404的第一伺服线性驱动电机410、用于驱动第二滑块406的第二伺服线性驱动电机411以及用于驱动第三滑块408的第三伺服线性驱动电机412,使用伺服线性驱动电机对滑块进行驱动,可以实现滑块的运动,而伺服线性驱动电机可以实现自动控制;
33.所述第一滑块404上设置有安装板,所述第一伺服线性驱动电机410位于所述安装板上,所述第二伺服线性驱动电机411和所述第三伺服线性驱动电机412均位于所述中间板409上。
34.本发明的工作原理:在使用时,在工件5底部安装面板10,然后将工件5吊装至工装系统2的托盘201正上方,此时通过旋转升降系统1的旋转升降调整,使得托盘201上安装的基板9通过气动夹紧模块6与工件5下部的面板10进行定位对接,并且实现固定,之后,旋转升降系统1上升,将整个工件5以及下部的工装系统2、活动导轨302一起抬升至校准的目标位置,然后,校准系统4通过内置的三轴滑轨模组和校准仪器,对工件5进行校调,其中校准系统4包括龙门架,所述龙门架包括两个位于所述导轨两侧的门身401以及一个横跨在两个所述门身401上的横梁402,所述三轴滑轨模组包括两个沿y轴方向设置的第一滑轨403和配合滑动的第一滑块404、沿x轴方向设置的第二滑轨405和配合滑动的第二滑块406、沿z轴方向设置的第三滑轨407和配合滑动的第三滑块408,两个所述第一滑轨403分别位于两个所述门身401上,所述横梁402的两端分别位于两个所述第一滑块404上,所述第二滑轨405位于所述横梁402上,所述第二滑块406固定在中间板409的一侧,所述第三滑块408固定在所述中间板409的另一侧,所述校准仪器位于所述第三滑轨407上,通过x轴、y轴、z轴三轴方向的调整,以及配合所述旋转升降系统1的旋转升降,对工件5各个位置的进行精确的校调,待调整完成后,校准系统4的x轴、y轴、z轴分别返回原位,之后,旋转升降系统1将整个工件5以及下部的工装系统2、活动导轨302一起下降至初始位置即活动导轨302与固定导轨301平齐形成两条光滑的第一轨道303,然后,输送系统3将工件5通过第一轨道303运送至下一工序,整个平台使用完毕。
35.本文中未详细说明的电气连接方式或者结构为现有技术。
36.上述虽然对本发明的具体实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。