1.本实用新型属于磨床领域,更具体而言,涉及全自动摆角的内螺纹数控磨床。
背景技术:
2.机床用于各种高精度与高效率的机械制造,伴随着各种高档运动机械(包括ic装备,精密仪器的进给机构等)和高档数控机床向着高速度、高精度和高可靠的方向发展进程中,丝杆与螺母成为了关键的零部件。随着市场各种需求不断发展和变化,滚珠丝杆、蜗杆等螺纹零部件与螺母、模块等内螺纹零部件的样式也是越来越多。
3.现在市面上存在的大部分机床是通过手动调整内螺纹磨削主轴的摆角来磨削内螺纹零件的螺纹,但是随着需求多样化的发展,一台能够数控自动摆螺旋角的内螺纹磨床成为了一种刚需。因此,研发出可数控自动摆角加工各种螺旋升角的高精度、高稳定性内螺纹磨床是市场急切需求期望。
技术实现要素:
4.本实用新型的主要目的在于提供一种全自动摆角的内螺纹数控磨床,用于解决现有磨床需要手动调整内螺纹磨削主轴的摆角的问题。
5.一种全自动摆角的内螺纹数控磨床,包括机体;z向移动机构,沿z轴滑动设置于所述机体上,所述z向移动机构设置有工件主轴,x向移动机构,沿x轴滑动设置于所述机体上,所述x向移动机构设置有砂轮主轴和摆角机构,所述摆角机构包括伺服电机和减速器,所述伺服电机的输出端经过所述减速器后传动连接于所述砂轮主轴,以驱动所述砂轮主轴转动来进行摆角调整。
6.根据本实用新型第一方面实施例所述的全自动摆角的内螺纹数控磨床,所述z向移动机构包括z向滑板和推动所述z向滑板滑动的z向传动结构,所述工件主轴设置于z向滑板上。
7.根据本实用新型第一方面实施例所述的全自动摆角的内螺纹数控磨床,所述x向移动机构包括x向滑板和推动所述x向滑板滑动的x向传动结构,所述砂轮主轴和摆角机构设置于x向滑板上。
8.根据本实用新型第一方面实施例所述的全自动摆角的内螺纹数控磨床,所述摆角机构上设有抱闸,所述抱闸在所述砂轮主轴调整到位后锁紧所述砂轮主轴。
9.根据本实用新型第一方面实施例所述的全自动摆角的内螺纹数控磨床,所述摆角机构上还设有编码器,以实时监测所述伺服电机的旋转角度进行角度调整反馈。
10.根据本实用新型第一方面实施例所述的全自动摆角的内螺纹数控磨床,所述z向滑板上还设置有砂轮修整器,所述砂轮修整器与所述工件主轴平行布置。
11.根据本实用新型第一方面实施例所述的全自动摆角的内螺纹数控磨床,所述x向滑板上还设有检测探头组件。
12.本实用新型上述技术方案中的一个技术方案至少具有如下优点或有益效果之一:
13.此全自动摆角的内螺纹数控磨床,采用伺服电机和减速器传动连接砂轮主轴,以对砂轮主轴的加工摆角进行调整,相较于传统磨床,其摆角的调节幅度更大,理论上可以实现360
°
内任意摆角,方便调整;此外,此磨床结构中,摆角机构具有精度高、操作简单、角度可视化的特点,使得加工效率得到了提高,加工精度也得到了提升。
附图说明
14.下面结合附图和实施例对本实用新型进一步地说明;
15.图1是本实用新型的整体结构示意图;
16.图2是本实用新型实施例的工作状态结构示意图;
17.图3是摆角机构与工件主轴的连接俯视图。
具体实施方式
18.下面详细描述本实用新型的实施方式,实施方式的示例在附图中示出,其中相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
19.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
20.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
21.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”以及“第二”的特征可以明示或者隐含地包括一个或者更多个特征。
22.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接或活动连接,也可以是可拆卸连接或不可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通信;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通、间接连通或两个元件的相互作用关系。
23.下文的公开提供了许多不同的实施方式或例子用来实现本实用新型的不同方案。
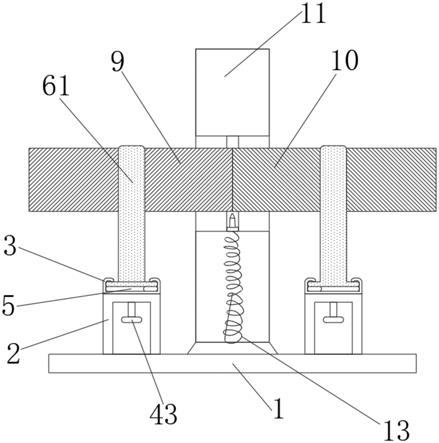
24.参照图1~图3所示,一种全自动摆角的内螺纹数控磨床,包括机体1;z向移动机构2,沿z轴滑动设置于机体上,z向移动机构2设置有工件主轴3,x向移动机构4,沿x轴滑动设置于机体上,x向移动机构4设置有砂轮主轴5和摆角机构6,摆角机构6包括伺服电机61和减速器62,伺服电机61的输出端经过减速器62后传动连接于砂轮主轴5,以驱动砂轮主轴5转动来进行摆角调整。
25.本实用新型其中的一些实施例中,z向移动机构2包括z向滑板21和推动z向滑板21
滑动的z向传动结构22,工件主轴3设置于z向滑板21上。
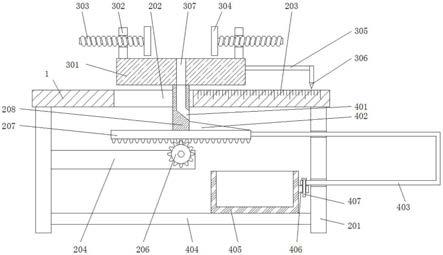
26.本实用新型其中的一些实施例中,x向移动机构4包括x向滑板41和推动x向滑板41滑动的x向传动结构42,砂轮主轴5和摆角机构6设置于x向滑板41上。
27.本实用新型其中的一些实施例中,摆角机构上设有抱闸,抱闸在砂轮主轴5调整到位后锁紧砂轮主轴5。
28.本实用新型其中的一些实施例中,摆角机构上还设有编码器8,以实时监测伺服电机61的旋转角度进行角度调整反馈。
29.本实用新型其中的一些实施例中,z向滑板21上还设置有砂轮修整器,砂轮修整器与工件主轴3平行布置。
30.本实用新型其中的一些实施例中,x向滑板41上还设有检测探头组件9。
31.本实用新型其中的一些实施例中,砂轮主轴5摆动的角度为0~28
°
。
32.此全自动摆角的内螺纹数控磨床,采用伺服电机61和减速器62传动连接砂轮主轴5,以对砂轮主轴5的加工摆角进行调整,相较于传统磨床,其摆角的调节幅度更大,理论上可以实现360
°
内任意摆角,方便调整;此外,此磨床结构中,摆角机构6具有精度高、操作简单、角度可视化的特点,使得加工效率得到了提高,加工精度也得到了提升。
33.一种全自动摆角的内螺纹数控磨床,包括机体1,在机体1上设置有x向移动机构4和z向移动机构2,其中z向移动机构2上设置有工件主轴3,工件主轴3用于待加工零件的装夹。
34.具体来说,x向移动机构4包括x向滑板41和推动x向滑板41滑动的x向传动结构42,摆角机构6和砂轮主轴5设置在x向滑板41上;z向移动机构2包括z向滑板21和推动z向滑板21滑动的z向传动结构22,工件主轴3设置在z向滑板21上。
35.工件主轴3设置在z轴方向,摆角机构6和砂轮主轴5设置于x轴方向,摆角机构6能与砂轮主轴5连接并传动。优选的,砂轮主轴5摆动的角度为0~28
°
。
36.摆角机构6包括伺服电机61,伺服电机61的输出端与工件主轴3连接,该连接可以通过齿轮组的形式连接,也可以采用其他的形式连接。
37.z向滑板上还设置有砂轮修整器7,砂轮修整器7与工件主轴3并排设置,砂轮修整器7用于安装碟轮,方便修整砂轮。砂轮修整器7与工件主轴3安装在一起,减少了热变形对加工精度的影响。
38.摆角机构6还包括减速器62和编码器8,其中,伺服电机61的输出端与减速器62传动连接,减速器62与砂轮主轴5传动连接。编码器8与伺服电机61信号连接,系统通过编码器8控制伺服电机61。x向滑板41上还设置有检测探头组件9,检测探头组件9用于快速对刀或者是尺寸测量等。
39.在本实用新型中,配置了摆角机构6,且可与编码器8配合进行工件主轴3的位置反馈实现闭环控制。
40.采用伺服电机61与减速器62直联,传动链少,具有较高的回转精度,而且通过减速的存在,减缓了摆角机构6的摆动速度,方便操作,不至于发生危险。
41.尽管已经示出和描述了本实用新型的实施方式,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施方式进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。