1.本公开涉及用于化学机械抛光中的抛光垫的光学监视。
背景技术:
2.通常通过在硅晶片上依序沉积导电层、半导电层或绝缘层来在基板上形成集成电路。各种制造工艺需要平坦化基板上的层。例如,一个制造步骤涉及在图案化的绝缘层上沉积导电填料层以填充绝缘层中的沟槽或孔洞。然后抛光填料层,直到暴露出绝缘层的凸起图案。在平坦化之后,保留在绝缘层的凸起图案之间的部分导电填料层形成在基板上的薄膜电路之间提供导电路径的通孔、插塞和线。
3.化学机械抛光(cmp)是一种被接受的平坦化方法。此平坦化方法通常需要将基板安装在承载头上。基板的暴露表面被放置成抵靠旋转抛光垫。承载头在基板上提供可控制的负载以将基板推靠在抛光垫上。将抛光液(诸如具有研磨颗粒的浆料)供应到抛光垫的表面。
4.在执行cmp工艺一定时间段之后,由于浆料副产物和/或从基板和/或抛光垫移除的材料的累积,抛光垫的表面可能变得上釉(glazed)。上釉可降低抛光速率或增加基板上的非均匀性。
5.通常,通过使用垫调节器的调节工艺将抛光垫保持在期望的表面粗糙度(且避免上釉)。使用抛光垫调节器以移除抛光垫上不需要的累积物,并使抛光垫的表面再生至所需的粗糙。典型的垫调节器包含通常嵌有金刚石磨料的研磨头,可将研磨头抵靠抛光垫表面刮磨以使垫重新成形(retexture)。
技术实现要素:
6.在一个方面中,一种用于化学机械抛光的设备包含:平台,所述平台具有表面以支撑抛光垫;承载头,所述承载头固持基板抵靠抛光垫的抛光表面;垫调节器,所述垫调节器将研磨主体压靠在抛光表面上;原位抛光垫监视系统,所述原位抛光垫监视系统包含设置在平台上方的成像器以捕获抛光垫的图像;以及控制器,所述控制器被配置成接收来自监视系统的图像并且基于所述图像生成抛光垫表面粗糙度的测量。
7.实施方式可包含以下特征中的一者或多者。
8.控制器可被配置成作为基于机器学习的图像处理系统来操作,并且被配置成将图像输入至图像处理系统。基于机器学习的图像处理系统可包含监督学习模块。基于机器学习的图像处理系统可包含尺寸缩减模块以接收图像并输出分量值,并且控制器可被配置成将图像的分量值输入至监督学习模块。控制器可被配置成将图像直接输入至监督学习模块。控制器可被配置成将监督学习模块作为人工神经网络来操作。
9.控制器可被配置成接收包含参数的值的其他数据,并且可被配置成基于图像和参数的值来生成抛光垫表面粗糙度的测量。参数可为抛光控制参数、状态参数、来自抛光系统中的传感器的测量结果或通过抛光系统外部的传感器得到的抛光垫的测量结果。参数可为
平台旋转速率、浆料分配速率、浆料成分、所述抛光垫被改变之后的基板的数量、或在抛光垫被安装在平台上之前通过独立计量站得到的抛光垫的表面粗糙度的测量结果。
10.控制器可被配置成进行以下至少一者:停止调节工艺、或基于抛光垫表面粗糙度的测量来调整调节参数。
11.成像器可在平台上径向可移动。成像器可安装在可在所述平台上横向摆动的臂上。
12.在另一方面中,一种抛光方法包含:使基板与平台上的抛光垫接触;生成基板与抛光垫之间的相对运动;使用光学传感器捕获抛光垫的图像;以及通过将图像输入至基于机器学习的图像处理系统来生成抛光垫的表面粗糙度的测量。
13.实施方式可包含以下特征中的一者或多者。
14.可接收包含多对的训练图像和训练值的训练数据。可使用训练数据在基于学习的图像处理系统中训练监督学习算法。可停止调节工艺或可基于抛光垫表面粗糙度的测量来调整调节参数。
15.某些实施方式可包含但不限于以下优点中的一者或多者。可使用非接触技术来确定抛光垫的粗糙度,因此可避免污染和损坏抛光垫。可准确且快速地确定抛光垫的粗糙度,并且可适当地调整调节工艺。可降低晶片间的非均匀性(wtwnu)。可使用非接触技术来确定粗糙度,因此可避免抛光垫的污染。
16.在附图和以下描述中阐述了一种或多种实施方式的细节。通过说明书和附图以及通过权利要求书,其他方面、特征和优点将是显而易见的。
附图说明
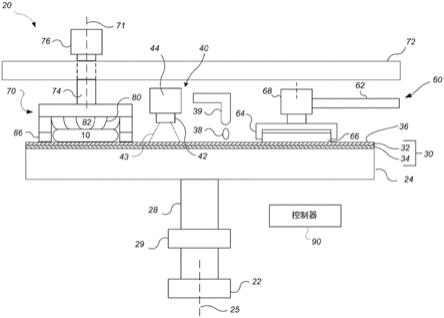
17.图1是化学机械抛光系统的示意性部分横截面的侧视图,所述化学机械抛光系统包含被配置成检测抛光垫的表面粗糙度的光学监视系统。
18.图2是化学机械抛光系统的示意性俯视图。
19.图3是基于机器学习的图像处理系统的框图。
20.各个附图中相同的附图标记指示相同的元件。
具体实施方式
21.化学机械抛光工艺趋于降低抛光垫的表面粗糙度,例如由于上述的上釉效应。可使用调节来恢复表面粗糙度。然而,垫的上釉程度以及调节恢复表面粗糙度的程度在整个抛光垫上可为非均匀的。因此,即使在调节之后,抛光垫表面粗糙度也可为非均匀的。此外,调节技术可在整个垫上以不同的速率磨损垫,导致垫厚度上的非均匀性,且可在抛光垫表面上留下周期性的刮擦或刻痕。可使用接触技术(例如轮廓仪)来测量表面粗糙度,但这可能会引入污染的风险,并且考虑到已经需要装备(调节器、载体等)的情况下,将接触技术装配在垫上可能是不切实际的。然而,可对抛光垫进行成像,且可将图像馈送到经训练的机器学习模型,所述经训练的机器学习模型输出表面纹理测量结果。然后,控制器可使用此测量结果来调整调节工艺,以达成目标表面纹理或改善整个抛光垫的表面纹理的均匀性。
22.本文使用的术语“表面纹理”包括表面粗糙度,例如ra、rms、rsk或rp,以及抛光垫表面中小于抛光垫上的正常开槽或穿孔图案的其他不规则性,例如波纹。例如,假设沟槽深
度为20密耳,则表面纹理可能包含高至约40至50微米的不规则性。
23.图1和图2图示了化学机械抛光设备的抛光系统20的示例。抛光系统20包含可旋转的盘形平台24,抛光垫30位于平台24上。可操作平台24以绕轴25旋转。例如,电机22可转动驱动轴28以旋转平台24。抛光垫30可为具有外层34和较软的背层32的双层抛光垫。抛光垫30的上表面提供抛光表面36。
24.抛光系统20可包含供应端口或组合的供应冲洗臂39,以将诸如浆料之类的抛光液38分配到抛光垫30上。
25.抛光系统20还可包含抛光垫调节器60,以研磨抛光垫30以将抛光表面36保持在一致的研磨状态。抛光垫调节器60包含基部、可在抛光垫30之上横向扫动的臂62、以及通过臂64连接到基部的调节器头64。调节器头64使研磨表面(例如,由调节器头64固持的盘66的下表面)与抛光垫30接触以对抛光垫30进行调节。研磨表面可为可旋转的,且研磨表面抵靠抛光垫的压力可以是可控制的。
26.在一些实施方式中,臂62枢转地附接到基部,并来回扫动以使调节器头64以振荡扫动运动的方式在整个抛光垫30上移动。调节器头64的运动可与承载头70的运动同步以防止碰撞。
27.可通过调节器头64上方或调节器头64中的垂直致动器68来提供调节器头64的垂直运动和抛光垫30上的调节表面的压力控制,例如,定位成向调节器头64施加向下的压力的可加压的腔室。替代地,垂直运动和压力控制可由垂直致动器提供,所述垂直致动器升降整个臂62和调节器头64的基部,或由枢转连接提供,所述枢转连接允许臂62可控制倾斜角度以及由此调节器头64在抛光垫30上方的高度。
28.承载头70可操作用于固持基板10抵靠抛光垫30。承载头70从支撑结构72(例如,旋转式传送带或轨道)悬挂,并且通过驱动轴74连接至承载头旋转电机76,使得承载头可绕轴71旋转。可选地,承载头70可例如在旋转式传送带或轨道72上的滑动器上横向振荡;或通过旋转式传送带本身的旋转振荡来横向振荡。在操作中,平台绕其中心轴25旋转,并且承载头绕其中心轴71旋转并且跨抛光垫30的顶部表面横向平移。承载头70可包含具有基板安装表面的弹性膜80以与基板10的背侧接触,以及多个可加压腔室82以向基板10上的不同区域(例如,不同的径向区域)施加不同的压力。承载头还可包含固定环84以固持基板。
29.抛光系统20包含原位光学垫监视系统40,原位光学垫监视系统40生成代表抛光垫30的表面纹理(例如,表面粗糙度)的信号。原位光学垫监视系统40包含成像器42,例如,定位在例如支撑臂44上的抛光垫上方的相机。例如,成像器42可为线扫描相机,并且垫监视系统40可被配置成在抛光垫30由于平台24的旋转而在相机40下方扫动时通过线扫描相机从多个测量结果生成二维图像。替代地,成像器42可为二维相机。成像器42可具有抛光垫30的表面36的一部分的视场43。相机可包含ccd阵列和光学部件,例如透镜,以将成像平面聚焦在抛光垫30的表面36上。
30.在一些实施方式中,成像器42定位在固定的径向位置中且对抛光垫30的固定的径向区域成像。在这种情况下,原位垫监视系统40可在抛光垫30上的固定径向位置处生成针对表面纹理(例如,表面粗糙度)的测量结果。
31.然而,在一些实施方式中,成像器42可例如沿着抛光垫30的半径横向移动。例如,参照图2,固持支撑臂42的基部46可被配置成枢转,从而使臂42在整个抛光垫30上摆动(参
见箭头a)并以弧形路径携载成像器42。作为另一示例,支撑臂44可以是或包含线性轨道,并且成像器42可通过线性致动器46(例如具有线性螺杆的步进电机)沿着轨道可移动。通过对不同的径向区域拍摄抛光垫30的图像,原位垫监视系统40可在抛光垫30上的不同径向位置处生成针对表面纹理(例如,表面粗糙度)的测量结果。
32.控制器90(例如,通用可编程数字计算机)从原位抛光垫监视系统40接收图像,并且可被配置成从图像生成抛光垫30的表面纹理(例如,表面粗糙度)的测量。在此上下文中,控制器90(或提供表面纹理测量结果的软件的部分)可被认为是垫监视系统40的部分。如上所述,由于抛光和调节工艺,抛光垫30的表面粗糙度随着时间(例如在抛光多个基板的过程中)改变。
33.控制器90还可被配置成基于从原位垫监视系统40接收的表面纹理的值(例如,表面粗糙度)来控制垫调节器60的系统。例如,当抛光垫30的表面纹理的测量满足阈值时,控制器90可停止调节工艺。作为另一示例,如果抛光垫的表面纹理满足另一阈值,控制器90可向抛光系统20的操作员生成警报(例如,抛光或调节操作没有按预期进行)。
34.作为另一示例,如果原位垫监视系统40在抛光垫30上(相对于旋转轴25)的不同径向位置处生成针对表面纹理(例如,表面粗糙度)的测量结果,则控制器90可使用所述测量结果来控制垫调节器60以改善表面纹理(例如,表面粗糙度)的均匀性。例如,控制器90可控制调节器臂62的扫动以控制抛光垫上的不同径向区域中调节器盘64的停留时间。例如,如果需要增加径向区域中的表面粗糙度,则可增加停留时间,而如果需要减少径向区域中的表面粗糙度,则可减少停留时间。
35.参照图3,来自原位垫监视系统40的图像被馈送到经训练的机器视觉图像处理系统100中。机器视觉图像处理系统100被配置成输出代表成像器42的视场43内的抛光表面36的部分的纹理(例如,表面粗糙度)的值。机器视觉图像处理系统100可被实现为控制器90的部分。机器视觉图像处理系统100可并入各种机器学习技术。例如,机器视觉图像处理系统100可包含神经网络,但其他方法也是可能的,例如,朴素贝叶斯分类器或支持向量机。
36.图3图示了可针对基于机器学习的图像处理系统100实现的功能区块。这些功能区块可包含可选的尺寸缩减模块110以执行图像的尺寸缩减,以及监督学习模块120(示出为实现成神经网络)。监督学习模块120实现监督学习算法以基于图像(或来自图像的尺寸缩减的数据)生成输出表面纹理(例如,表面粗糙度)的测量结果的功能。这些功能区块可跨多个计算机分布。
37.监督学习模块120的输出可被馈送到可被实现为控制器90的部分的工艺控制系统130,以基于表面纹理测量结果来调整抛光工艺。例如,工艺控制系统130可基于表面纹理(例如,表面粗糙度)的测量结果在抛光工艺期间或之间检测调节终点和停止调节和/或调整调节参数(例如,扫动轮廓、调节器头压力等),以降低抛光表面36的表面纹理(例如,表面粗糙度)的非均匀性。
38.假设机器学习模块120为神经网络,所述神经网络包含针对每个主成分的多个输入节点122、多个隐藏节点124(以下也称为“中间节点”)和将生成表面纹理(例如,表面粗糙度)测量结果的输出节点126。通常,隐藏节点124从与所述隐藏节点连接的输入节点122输出值的加权和的非线性函数的值。
39.例如,隐藏节点124(指定为节点k)的输出可表示为:
其中tanh是双曲正切,a
kx
是第k个中间节点与(在m个输入节点中的)第x个输入节点之间的连接权重,并且i
m
是在第m个输入节点处的值。然而,可使用其他非线性函数代替tanh,例如整流线性单元(relu)函数及其变体。
40.可选的尺寸缩减模块110将图像缩减到更有限数量的分量值112,例如l个分量值。神经网络120包含针对图像被缩减成的每个分量的输入节点122,例如,在尺寸缩减模块110生成l个分量值的情况下,神经网络120将至少包含输入节点n1、n2…
n
l
。
41.然而,监督学习模块120可以可选地接收除图像或分量值之外的一个或多个输入114。(多个)其他输入114可包含来自抛光系统中的另一传感器的测量结果,例如,通过温度传感器得到的垫的温度的测量结果,或来自流量传感器的浆料流动速率的测量结果。(多个)其他输入可包含抛光控制参数的值,例如,平台旋转速率、浆料流动速率或浆料成分。可从由控制器90存储的抛光配方获得抛光控制参数值。(多个)其他输入可包含由控制器追踪的状态参数,例如,使用的垫的种类的标识(诸如制造商、品牌名称、垫的成分、开槽图案等),或垫被改变之后所抛光的基板数量。(多个)其他输入可包含来自不是抛光系统的部分的传感器的测量结果,例如,在垫被安装在平台上之前通过独立计量站得到的抛光垫的表面纹理(例如,表面粗糙度)的测量结果。此允许监督学习模块120在计算表面纹理(例如,表面粗糙度)时考虑到这些其他处理或环境变量。假设监督学习模块120是神经网络,所述神经网络可包含一个或多个其他输入节点(例如,节点122a)以接收其他数据。
42.神经网络120的架构可在深度和宽度上变化。例如,尽管神经网络120被示出为具有单列的隐藏节点124,神经网络120可包含多列。中间节点124的数量可等于或大于输入节点122的数量。神经网络可为完全连接网络或卷积网络。
43.在将监督学习模块120用于例如器件晶片的处理之前,需要配置监督学习模块120。
44.作为配置程序的部分,监督学习模块120接收训练数据,所述训练数据可包含多个训练图像和多个训练值,例如表面纹理值,例如表面粗糙度值。每个参考图像具有训练值,即,训练数据包含成对的图像和训练值。
45.例如,图像可以取各种垫样本。另外,可使用计量装备来执行样本的表面粗糙度的测量,所述计量装备例如接触轮廓仪、干涉仪或共聚焦显微镜。每个训练图像因此可与训练值相关联,所述训练值是从中取得图像的样本的表面粗糙度。
46.在一些实施方式中,数据存储可存储多组训练数据。不同训练数据组可对应于不同类型的抛光垫,例如,不同的成分和/或沟槽图案。监督学习模块120可例如经由用户接口从半导体制造厂的操作员接收选择的一组训练数据。
47.可使用常规技术来执行监督学习模块120的训练。例如,针对神经网络,可使用训练图像和训练值通过反向传播来执行训练。例如,当神经网络以训练模式操作时,训练图像的缩减尺寸值被馈送到相应的输入节点n1、n2…
n
l
,同时训练值v被馈送到输出节点126。可对每一对图像和训练值重复此操作。在监督学习模块120接收除图像或分量值之外的输入的情况下,针对这些参数的值也可作为训练数据被馈送到机器学习模块。
48.一旦已经执行训练,随后就可使用监督学习模块的经训练的实例,例如,如上所述的。即,在基板的处理期间,抛光垫的图像以及其他参数值可被馈送到经训练的监督学习模
块120,经训练的监督学习模块120输出表面纹理(例如,表面粗糙度)的值。然后,可将表面纹理值(例如,表面粗糙度)用于控制调节操作,例如,如上所述的。
49.原位抛光垫监视系统可用于各种抛光系统。抛光垫或承载头或两者都可移动以在抛光表面与基板之间提供相对运动。抛光垫可为固定至平台的圆形(或一些其他形状)垫、在供应滚筒与收取滚筒之间延伸的带、或连续的皮带。可将抛光垫固定在平台上,在抛光操作之间在平台上逐渐前进,或在抛光期间在平台上连续驱动。垫可在抛光期间固定至平台,或在抛光期间可在平台与抛光垫之间有流体承载。抛光垫可以是标准的(例如,具有或不具有填料的聚氨酯)粗糙垫、软垫、或固定磨料垫。
50.另外,尽管前述集中在抛光期间的监视,但可在抛光基板之前或之后(例如在将基板转移到抛光系统时)获得抛光垫的测量结果。
51.可以以数字电子电路系统、或以计算机软件、固件或硬件或其组合来实现控制器及其功能操作。被“配置”成执行操作的控制器具有足够的软件、固件或硬件以实际执行操作,而不仅仅是能够被编程或修改为执行操作。
52.实施例可被实现为一种或多种计算机程序产品,即,有形地体现在信息载体中(例如,非瞬时机器可读存储介质中或传播信号中)的一种或多种计算机程序,以由数据处理设备(例如,可编程处理器、计算机或多个处理器或计算机)执行或控制数据处理设备的操作。计算机程序(也称为程序、软件、软件应用程序或代码)可以以任何形式的编程语言(包含编译或解释语言)编写,并且可以以任何形式部署,包含作为独立程序或作为适于在计算环境中使用的模块、部件、子例程或其他单元。计算机程序不一定对应于文件。程序可存储在保存其他程序或数据的文件的一部分中、专用于所述程序的单个文件中、或多个协调文件中(例如,存储一个或多个模块、子程序或代码的各部分的文件)。可将计算机程序部署为在一个站点处或跨多个站点分布并通过通信网络互连的一个计算机或多个计算机上执行。
53.可由执行一个或多个计算机程序以对输入数据进行操作并生成输出以执行功能的一个或多个可编程处理器来执行本说明书中描述的过程和逻辑流程。也可由专用逻辑电路系统(例如fpga(现场可编程门阵列)或asic(专用集成电路))来执行过程和逻辑流程并且设备也可实现为专用逻辑电路系统。
54.已描述了本发明的众多实施例。然而,应理解在不脱离本发明的精神和范围的情况下可进行各种修改。据此,其他实施例落在所附权利要求书的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。