1.本实用新型涉及机器人技术领域,尤其是一种机器人头部运动机构。
背景技术:
2.一直以来,机器人的头部运动都是机器人开发问题中的难点,过于复杂的头部运动系统设计不仅占用机器人头部有限的空间,还增加了机器人头部的重量和制造成本,同时对系统运行的稳定性提出更高的要求,如何简化机器人头部运动系统,是本领域技术人员急需解决的技术问题。
3.简而言之,现有技术缺点主要表现在以下方面:
4.1、头部转动较为不灵活,转动过程刚硬且缓慢。
5.2、传动机构复杂占用空间大,稳定性差。
6.3、制造成本高。
技术实现要素:
7.本实用新型要解决的技术问题是:为了解决现有头部转动较为不灵活,转动过程刚硬且缓慢、传动机构复杂占用空间大,稳定性差、制造成本高问题,本实用新型提供了一种机器人头部运动机构,包括头部面板、上下运动组件、左右运动组件以及隔板,左右运动组件通过设有的连接柱设置于隔板上,上下运动组件通过设有的螺钉与左右运动组件连接,头部面板通过设有的螺钉与上下运动组件连接,有效解决了上述问题。
8.本实用新型解决其技术问题所采用的技术方案是:
9.一种机器人头部运动机构,包括头部面板、上下运动组件、左右运动组件以及隔板,所述左右运动组件通过设有的连接柱设置于所述隔板上,所述上下运动组件通过设有的螺钉与所述左右运动组件连接,所述头部面板通过设有的螺钉与所述上下运动组件连接。
10.具体的,所述上下运动组件包括右脖子支架,旋转轴,左脖子支架,上下旋转电机,卡簧,左连接支架,上下定位遮挡针,上下定位光电开关,传动齿轮组,挡边法兰轴承,上下限位挡片,上下限位立柱,右连接支架和连接块。
11.具体的,所述右脖子支架和左脖子支架置于所述左右运动组件上,所述旋转轴两端穿过两个挡边法兰轴承置于所述右脖子支架和左脖子支架之间,所述上下旋转电机通过螺钉连接设置于所述左脖子支架上,所述传动齿轮组的主动轮置于所述上下旋转电机的电机轴上,从动轮设置于所述旋转轴上,所述左连接支架,上下定位遮挡针,上下限位挡片,右连接支架都设置于所述旋转轴上,通过其上的d形孔与所述旋转轴上d形轴段进行配合,并通过所述卡簧进行轴向定位,所述上下定位光电开关设置于所述左脖子支架上,所述上下限位立柱设置于所述右脖子支架上,所述连接块连接所述右脖子支架和左脖子支架,
12.具体的,当所述上下运动组件工作时,所述上下旋转电机通过所述传动齿轮组带动所述旋转轴转动,所述旋转轴带动设置于其上的所述左连接支架,上下定位遮挡针,上下
限位挡片以及右连接支架转动,其中所述左连接支架和右连接支架带动所述头部面板转动,所述上下定位遮挡针和上下定位光电开关配合使头部能够确定上下运动的复位位置,所述上下限位挡片和上下限位立柱配合,使头部上下转动在一定角度范围内。
13.具体的,所述左右运动组件包括上中间夹板,上侧边夹板,轴承外圈限位,轴承内圈限位,轴承,下侧边夹板,左右定位光电开关,左右定位遮挡针,下中间夹板,左右限位挡片,左右限位立柱,带法兰空心轴,大同步轮,同步带,小同步轮,电机安装板,左右旋转电机,连接立柱,空心轴支撑轴承和轴承固定件。
14.具体的,所述轴承固定件将所述空心轴支撑轴承固定于所述电机安装板上,所述左右旋转电机也设置于所述电机安装板上,所述小同步轮设置于所述左右旋转电机的电机轴上,所述大同步轮设置于所述带法兰空心轴上,所述带法兰空心轴通过螺钉与所述中间夹板下连接,所述左右定位光电开关和所述左右限位挡片设置于所述下侧边夹板上,所述定位遮挡针和左右限位立柱设置于所述下中间夹板上,所述上侧边夹板,轴承外圈限位,下侧边夹板将所述轴承的外圈固定于所述连接立柱上,所述上中间夹板,轴承内圈限位,下中间夹板与所述轴承内圈固连。
15.具体的,当所述左右运动组件工作时,所述左右旋转电机通过所述小同步轮,同步带以及大同步轮带动所述带法兰空心轴,从而带动所述上中间夹板转动,从而带动头部左右转动,所述左右定位遮挡针和左右定位光电开关配合使头部能够确定左右运动的复位位置,所述左右限位挡片和左右限位立柱配合,使头部上下转动在一定角度范围内
16.本实用新型的有益效果是:本实用新型提供了一种机器人头部运动机构,包括头部面板、上下运动组件、左右运动组件以及隔板,左右运动组件通过设有的连接柱设置于隔板上,上下运动组件通过设有的螺钉与左右运动组件连接,头部面板通过设有的螺钉与上下运动组件连接,结构简单,稳定性好;上下运动组件占用空间小;左右运动组件中间利于走线;制造成本低。
附图说明
17.下面结合附图和实施例对本实用新型进一步说明。
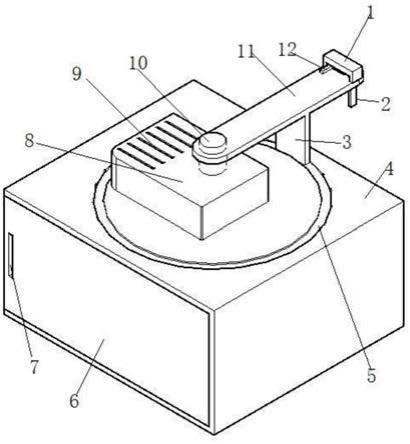
18.图1为本实用新型的结构示意图;
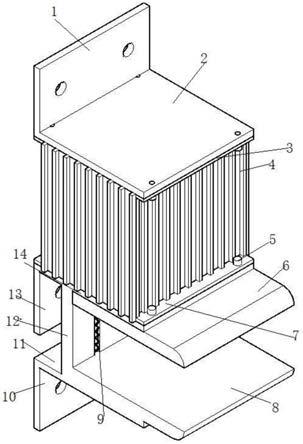
19.图2为上下运动组件的结构示意图;
20.图3为左右运动组件的结构示意图。
21.图中:1头部面板,2上下运动组件,3左右运动组件,4隔板,201右脖子支架,202旋转轴,203左脖子支架,204上下旋转电机,205卡簧,206左连接支架,207上下定位遮挡针,208上下定位光电开关,209传动齿轮组,210 挡边法兰轴承,211上下限位挡片,212上下限位立柱,213右连接支架,214 连接块,301上中间夹板,302上侧边夹板,303轴承外圈限位,304轴承内圈限位,305轴承,306下侧边夹板,307左右定位光电开关,308左右定位遮挡针,309下中间夹板,310左右限位挡片,311左右限位立柱,312带法兰空心轴,313大同步轮,314同步带,315小同步轮,316电机安装板,317左右旋转电机,318连接立柱,319空心轴支撑轴承,320轴承固定件。
具体实施方式
22.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
23.一种机器人头部运动机构,包括头部面板1,上下运动组件2,左右运动组件3,隔板4,左右运动组件3通过连接柱设置于隔板4上,上下运动组件2通过螺钉与左右运动组件3连接,头部面板1通过螺钉与上下运动组件2连接。
24.上下运动组件2包括右脖子支架201,旋转轴202,左脖子支架203,上下旋转电机204,卡簧205,左连接支架206,上下定位遮挡针207,上下定位光电开关208,传动齿轮组209,挡边法兰轴承210,上下限位挡片211,上下限位立柱212,右连接支架213以及连接块214,右脖子支架201和左脖子支架203置于左右运动组件上,旋转轴202两端穿过两个挡边法兰轴承210 置于右脖子支架201和左脖子支架203之间,上下旋转电机204通过螺钉连接设置于左脖子支架203上,传动齿轮组209的主动轮置于上下旋转电机204的电机轴上,从动轮设置于旋转轴202上,左连接支架206,上下定位遮挡针207,上下限位挡片211,右连接支架213都设置于旋转轴202上,通过其上的d形孔与旋转轴202上d形轴段进行配合,并通过卡簧205进行轴向定位。上下定位光电开关208设置于左脖子支架203上,上下限位立柱212设置于右脖子支架 201上。连接块214连接右脖子支架201和左脖子支架203,增加结构刚度。上下运动组件2工作时上下旋转电机204通过传动齿轮组209带动旋转轴202转动,旋转轴202带动设置于其上的左连接支架206,上下定位遮挡针207,上下限位挡片211,右连接支架213转动,其中左连接支架206和右连接支架213带动头部面板1转动,上下定位遮挡针207和上下定位光电开关208配合使头部能够确定禁止状态位置,上下限位挡片211和上下限位立柱212配合,使头部上下转动在一定角度范围内。
25.左右运动组件3包括上中间夹板301,上侧边夹板302,轴承外圈限位303,轴承内圈限位304,轴承305,下侧边夹板306,左右定位光电开关307,左右定位遮挡针308,下中间夹板309,左右限位挡片310,左右限位立柱311,带法兰空心轴312,大同步轮313,同步带314,小同步轮315,电机安装板316,左右旋转电机317,连接立柱318,空心轴支撑轴承319以及轴承固定件320。轴承固定件320将空心轴支撑轴承319固定于电机安装板316上,左右旋转电机317也设置于电机安装板316上,小同步轮315设置于左右旋转电机317的电机轴上,大同步轮313设置于带法兰空心轴312上,带法兰空心轴312通过螺钉与中间夹板下309连接,左右定位光电开关307和左右限位挡片310设置于下侧边夹板306上,定位遮挡针308和左右限位立柱311设置于下中间夹板 309上,上侧边夹板302,轴承外圈限位303,下侧边夹板306将轴承305的外圈固定于连接立柱318上,上中间夹板,轴承内圈限位304,下中间夹板309与轴承305内圈固连。左右运动组件3工作时,左右旋转电机317通过小同步轮 315,同步带314,大同步轮313带动带法兰空心轴312,从而带动上中间夹板 301转动,从而带动头部左右转动。左右定位遮挡针308和左右定位光电开关 307配合使头部能够确定禁止状态位置,左右限位挡片310和左右限位立柱311 配合,使头部上下转动在一定角度范围内。
26.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。