1.本实用新型涉及工业机器人技术领域,尤其涉及一种工业机器人用气动夹爪。
背景技术:
2.工业机器人在现代工业生产中被广泛使用,与人类相比,工业机器人的工作效率高且稳定,尤其是面对一些人力难以完成的操作时,工业机器人的优势愈发明显,目前有许多工业机器人都用于夹持并转移产品,并据此制造出了许多专用的夹爪,气动夹爪是众多类型夹爪中的一种,但是他们不便于拆卸,由此带来不便于维修的问题,损坏后需要更换新的夹爪,增加了使用的成本。
技术实现要素:
3.本实用新型的目的在于克服现有技术存在的以上问题,提供一种工业机器人用气动夹爪。
4.为实现上述技术目的,达到上述技术效果,本实用新型通过以下技术方案实现:
5.一种工业机器人用气动夹爪,包括外壳,所述外壳的内部固定设有若干平行设置的导向轴,所述导向轴上滑动设有两个由气缸驱动的滑移座,所述滑移座的一端设有通过螺钉与其相连接的连接部,所述连接部上固定设有延伸至外壳外部的爪体,所述外壳包括一侧敞口的壳体,所述壳体上位于敞口的一侧处设有由螺钉与其相固定的盖板,壳体的另一侧开设有两条供爪体移动的让位槽,壳体的顶部开设有若干散热槽。
6.进一步的,所述滑移座包括座体,所述座体上与连接部相对的一端设有与其一体成型的连接耳,所述连接耳的内壁开设有与气缸上的限位环相配合的限位槽。
7.进一步的,所述连接部包括套设于座体一端的框体,所述框体的内壁设有若干与其一体成型的且与座体上的楞槽相配合的楞条,框体的外壁位于其一端且靠近其顶部处设有螺钉安装槽。
8.进一步的,所述爪体包括固定于框体端部的爪座,所述爪座的端部设有两根与其一体成型的爪臂,所述爪臂的端部设有与其一体成型的弧形爪端。
9.进一步的,所述弧形爪端的内壁和爪臂上靠近弧形爪端处的内壁上均开设有若干防滑槽。
10.进一步的,所述壳体上位于敞口的一侧处设有与其一体成型的且通过螺钉与盖板相连接的内延框。
11.本实用新型使用时气缸驱动两个滑移座沿着导向轴相向运动使两个爪体分开,待爪体抓住产品后气缸驱动两个滑移座沿着导向轴相对运动使两个爪体将产品夹紧,当爪体损坏后,拧下螺钉取下盖板,便于对壳体内部的结构进行维修,由于连接部通过螺钉与滑移座连接,便于拆卸和更换,降低了使用成本。
附图说明
12.此处所说明的附图用来提供对本实用新型的进一步理解,构成本申请的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
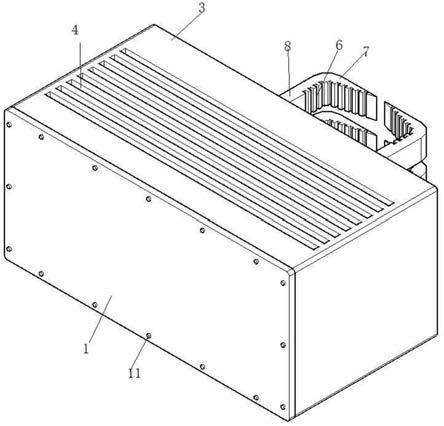
13.图1是本实用新型一个角度的整体结构示意图;
14.图2是本实用新型另一个角度的整体结构示意图;
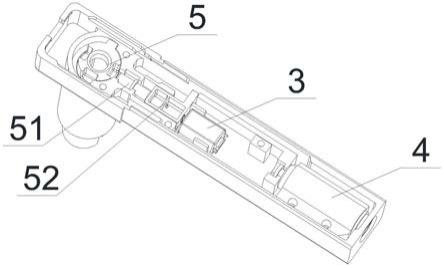
15.图3是本实用新型图2的部分结构示意图;
16.图4是本实用新型图3的部分结构示意图;
17.图5是本实用新型滑移座的结构示意图;
18.图6是本实用新型连接部的结构示意图;
19.图7是本实用新型气缸的结构示意图。
20.图中标号说明:1
‑
盖板、2
‑
爪座、3
‑
壳体、4
‑
散热槽、5
‑
让位槽、6
‑
防滑槽、7
‑
弧形爪端、8
‑
爪臂、9
‑
框体、10
‑
导向轴、11
‑
螺钉、12
‑
气缸、13
‑
连接耳、14
‑
座体、15
‑
限位环、16
‑
内延框、17
‑
框体、18
‑
限位槽、19
‑
楞槽、20
‑
楞条、21
‑
螺钉安装槽。
具体实施方式
21.下面将参考附图并结合实施例,来详细说明本实用新型。
22.如图1至7所示,本实施例提供一种工业机器人用气动夹爪,包括外壳,所述外壳的内部固定设有若干平行设置的导向轴10,所述导向轴10上滑动设有两个由气缸12驱动的滑移座,所述滑移座的一端设有通过螺钉11与其相连接的连接部,所述连接部上固定设有延伸至外壳外部的爪体,所述外壳包括一侧敞口的壳体3,所述壳体3上位于敞口的一侧处设有由螺钉11与其相固定的盖板1,壳体3的另一侧开设有两条供爪体移动的让位槽5,壳体3的顶部开设有若干散热槽4。
23.气缸12驱动两个滑移座沿着导向轴10相向运动使两个爪体分开,待爪体抓住产品后气缸12驱动两个滑移座沿着导向轴10相对运动使两个爪体将产品夹紧,当爪体损坏后,拧下螺钉11取下盖板1,便于对壳体3内部的结构进行维修,由于连接部通过螺钉11与滑移座连接,便于拆卸和更换,降低了使用成本。
24.优选的,所述滑移座包括座体14,所述座体14上与连接部相对的一端设有与其一体成型的连接耳13,所述连接耳13的内壁开设有与气缸12上的限位环15相配合的限位槽18。
25.限位槽18与限位环15配合,便于气缸12与连接耳13连接,从而达到驱动座体14沿着导向轴10移动。
26.优选的,所述连接部包括套设于座体14一端的框体17,所述框体17的内壁设有若干与其一体成型的且与座体14上的楞槽19相配合的楞条20,框体17的外壁位于其一端且靠近其顶部处设有螺钉安装槽21。
27.楞条20与楞槽19配合,便于框体17与座体14卡合,从而便于螺钉11将框体17与座体14连接。
28.优选的,所述爪体包括固定于框体17端部的爪座2,所述爪座2的端部设有两根与其一体成型的爪臂8,所述爪臂8的端部设有与其一体成型的弧形爪端7。
29.弧形爪端7、爪臂8和爪座2配合,可以适用于不同形状的产品。
30.优选的,所述弧形爪端7的内壁和爪臂8上靠近弧形爪端7处的内壁上均开设有若干防滑槽6。
31.防滑槽6的设置增大了爪体与产品之间的摩擦力,便于夹紧产品。
32.优选的,所述壳体3上位于敞口的一侧处设有与其一体成型的且通过螺钉11与盖板1相连接的内延框16。
33.内延框16的设置便于通过螺钉11安装盖板1。
34.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
技术特征:
1.一种工业机器人用气动夹爪,包括外壳,其特征在于:所述外壳的内部固定设有若干平行设置的导向轴,所述导向轴上滑动设有两个由气缸驱动的滑移座,所述滑移座的一端设有通过螺钉与其相连接的连接部,所述连接部上固定设有延伸至外壳外部的爪体,所述外壳包括一侧敞口的壳体,所述壳体上位于敞口的一侧处设有由螺钉与其相固定的盖板,壳体的另一侧开设有两条供爪体移动的让位槽,壳体的顶部开设有若干散热槽。2.根据权利要求1所述的一种工业机器人用气动夹爪,其特征在于:所述滑移座包括座体,所述座体上与连接部相对的一端设有与其一体成型的连接耳,所述连接耳的内壁开设有与气缸上的限位环相配合的限位槽。3.根据权利要求2所述的一种工业机器人用气动夹爪,其特征在于:所述连接部包括套设于座体一端的框体,所述框体的内壁设有若干与其一体成型的且与座体上的楞槽相配合的楞条,框体的外壁位于其一端且靠近其顶部处设有螺钉安装槽。4.根据权利要求3所述的一种工业机器人用气动夹爪,其特征在于:所述爪体包括固定于框体端部的爪座,所述爪座的端部设有两根与其一体成型的爪臂,所述爪臂的端部设有与其一体成型的弧形爪端。5.根据权利要求4所述的一种工业机器人用气动夹爪,其特征在于:所述弧形爪端的内壁和爪臂上靠近弧形爪端处的内壁上均开设有若干防滑槽。6.根据权利要求1所述的一种工业机器人用气动夹爪,其特征在于:所述壳体上位于敞口的一侧处设有与其一体成型的且通过螺钉与盖板相连接的内延框。
技术总结
本实用新型涉及一种工业机器人用气动夹爪,包括外壳,所述外壳的内部固定设有若干平行设置的导向轴,所述导向轴上滑动设有两个由气缸驱动的滑移座,所述滑移座的一端设有通过螺钉与其相连接的连接部,所述连接部上固定设有延伸至外壳外部的爪体,所述外壳包括一侧敞口的壳体,所述壳体上位于敞口的一侧处设有由螺钉与其相固定的盖板,壳体的另一侧开设有两条供爪体移动的让位槽,壳体的顶部开设有若干散热槽;本实用新型使用时气缸驱动两个滑移座沿着导向轴相向运动使两个爪体分开,待爪体抓住产品后气缸驱动两个滑移座沿着导向轴相对运动使两个爪体将产品夹紧,当爪体损坏后,拧下螺钉取下盖板,便于对壳体内部的结构进行维修。修。修。
技术研发人员:苗智超 许晓东
受保护的技术使用者:扬州工业职业技术学院
技术研发日:2021.03.05
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。