1.本发明涉及机器人领域,尤其是一种用于引水隧洞检测,提高检测可靠性的引水隧洞检修机器人。
背景技术:
2.随着我国国民经济的发展,基础设施建设也加大了发展的步伐,而在基础设施建设中,水利工程建设占有很大的比重,引水隧洞的施工是整个水利工程的基础。引水隧道工程是一个隐蔽的工程,很难直接观察到在施工中留下的缺陷,所以在施工过程中对引水隧道应坚持及时检查、发现问题并且改进施工技术,并采用增加结构强度、灌浆、防渗和排水、隧洞钢衬安装等技术措施修复施工缺陷,从而有效提高隧洞混凝土施工质量。
3.引水隧洞为水电站发电输送可靠的发电用水,对涵洞裂缝、孔洞渗漏等问题的定期检修是保障水电站安全正常发电的重中之重。一般情况下,电站需要断水停电,甚至放空引水隧道和调压井内的水,检修人员才能进入对引水涵洞等进行全面检修,人力物力成本颇高,且存在一定危险性。引水隧洞位置较深、空间有限,人工检测难度较大。
技术实现要素:
4.本发明所要解决的就是现有引水隧洞人工检测危险性高,且检测难度大,可靠性偏低的问题,提供一种用于引水隧洞检测,提高检测可靠性的引水隧洞检修机器人。
5.本发明的引水隧洞检修机器人,其特征在于该检修机器人由机器人本体、吊篮、操控箱和缆线组件组成,机器人本体放置在吊篮中,缆线组件通过线缆分别与机器人本体和操控箱连接,操控箱通过电缆与电源连接,电源为机器人本体和操控箱提供电能;其中:
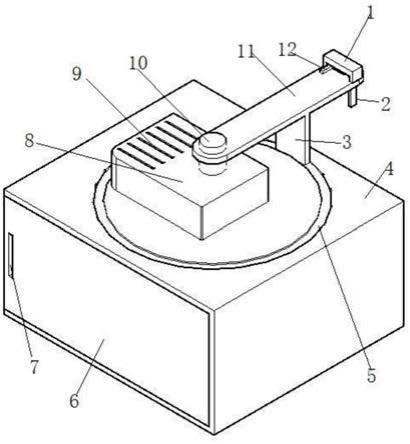
6.机器人本体包括壳体、盖板、传动部件、滑轨、三维扫描仪、外接插口、云台半球摄像头、圆灯、led灯、单向摄像头、吊环和缆线接口,盖板通过螺钉固定在壳体上表面,两组滑轨、每组两条,分别对称焊接固定在盖板表面两侧和壳体两侧壁上;传动部件分为两组,分别固定在壳体两侧下部;三维扫描仪焊接固定在盖板尾端,云台半球摄像头焊接在盖板前端,位于盖板两滑轨之间;两个圆灯分别安装在盖板上的两条滑轨上,并沿滑轨滑动;led灯与单向摄像头分别安装在壳体前端与尾部侧壁的左、右两侧;两个吊环对称固定在壳体尾部侧壁上,缆线接口安装在两个吊环之间的壳体尾部侧壁上;
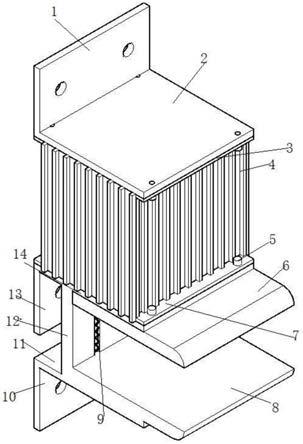
7.吊篮包括竖杆、横杆、底板、车横杆、置车板、吊钩、缆线侧板、缆线顶板、缆线中板、大滚轴、小滚轴、小滚轴支架、保护支架、门档和车侧杆,竖杆与横杆焊接固定成一个框架,底板水平固定在吊篮底部,车横杆与车侧杆连接为矩形焊接在底板前端,置车板焊接固定在车横杆和车侧杆上,吊钩焊接在横杆中部;线缆侧板与缆线顶板焊接固定在吊篮尾部,组成线缆框,线缆中板竖直固定在线缆框中间位置;数根大滚轴水平穿过线缆中板,两端固定在两侧的线缆侧板上;线缆顶板上部固定安装数组滚轴支架,每组滚轴支架上均安装一个小滚轴;保护支架设置在线缆框背部,与缆线侧板和缆线中板焊接固定;线缆框侧边底部还设置有门档,门档与两端竖杆底部焊接固定;
8.缆线组件包括缆线支架、齿轮盖、缆线盘、丝杆、理线器、定位杆、理线滑轮、航空插头、电机、光纤、供电器、驱动器、线座子、按钮、齿轮组、链条、固定杆、滑杆、支撑杆、大伸缩杆、小伸缩杆、吊环和支撑板,缆线支架为柱体状,齿轮盖安装在缆线支架的右侧板上;缆线盘固定在缆线支架中间,缆线盘的转轴通过螺钉与缆线支架的左、右侧板固定连接,转轴右端穿出右侧板,缆线盘上缠绕有缆线;丝杆水平固定在缆线支架前端,丝杆两端分别与缆线支架的左、右侧板连接,且右端穿过右侧板;定位杆位于丝杆上方,与丝杆平行,定位杆两端分别于缆线支架的左、右侧板连接;定位器上部套装在定位杆上,中部套装在丝杆上;两根理线滑轮水平设置在丝杆下方,两根理线滑轮相互平行,理线滑轮的两端分别与缆线支架的左、右侧板连接;缆线盘上的缆线从理线器下部穿过,航空插头固定在缆线前端头上;电机固定在缆线支架的下底板上,电机的动力输出轴穿过缆线支架右侧板,电机的电源线从缆线盘的转轴内穿出缆线支架,光纤一端从缆线盘的转轴中穿入;支撑板水平固定在缆线支架后部,分别与缆线支架的左、右侧板及后侧板焊接固定,供电器、驱动器和线座子均固定在支撑板上;缆线支架尾部设置有按钮;齿轮组设置在缆线支架右侧板外部,包括齿轮i、齿轮ii和齿轮iii,齿轮i安装在丝杆右端,齿轮ii为双联齿轮安装在缆线盘转轴的右端,齿轮iii安装在电机的动力输出轴上,齿轮i、齿轮ii以及齿轮ii、齿轮iii分别通过链条连接实现联动,电机通过动力输出轴带动齿轮iii转动;固定杆呈中空的矩形状,水平焊接在缆线支架前端下部,与丝杆平行,滑杆穿在固定杆内部;两根支撑杆分别焊接在缆线支架尾端下部两侧;两根大伸缩杆分别安装在滑杆两端,两根小伸缩杆分别安装在两根支撑杆的外端;四个吊环分别焊接在缆线支架顶部四个角上。
9.所述的操控箱上设置显示屏、插口、usb接口、网络接口、里程表、摇杆和按键,显示屏安装在操控箱侧壁上,显示屏绕连接点转动,操控箱下部分别设有插口、usb接口、网络接口、里程表、摇杆和按键,操控箱侧面设有接缆口和电源线。
10.所述的传动部件包括行走履带、履带支架、张紧轮、驱动轮、承重轮和电机减速器,履带支架固定在壳体外侧壁下部,电机减速器安装在壳体,驱动轮设置在壳体后端外部两侧,数个张紧轮从前至后等距固定在壳体中部,数个承重轮从前至后等距固定在壳体下部,驱动轮与电机减速器连接,行走履带覆盖在驱动轮、张紧轮与承重轮上,驱动轮带动行走履带转动,以实现机器人行走,承重轮提供支撑力,张紧轮则调整行走履带的张紧程度。
11.所述的机器人主体外部采用在框架上蒙皮方式,其材料为内部框架采用7系列铝合金,蒙皮采用5系列铝合金,整个车体为防水结构,可完全进入水中。
12.本发明的引水隧洞检修机器人,设计科学,使用方便,结构简单,在机器人上设有前后摄像头和灯光,实现了在没有光源的情况下可以清晰的看到机器人周身的情况,同时摄像头可以通过显示屏成像给作业人员,并设有可360度旋转的摄像头;利用滑轨来改变外接设备的位置;通过三维激光扫描仪把引水隧洞内部的情况扫描出来;利用吊篮把检修机器人运送到检测位置,通过上面的作业人员操控检修机器人,使检修机器人爬行离开吊篮,并向引水隧洞方向行驶,进行检测检修。该机器人可以有效的完成引水隧洞检测,从而降低了作业人员检查的风险,增加了引水隧洞检测的可靠性,可以根据摄像以及三维激光扫描仪的图像来看出引水隧洞的内部情况,从而可以及时对引水隧洞出现的问题做出修复。
附图说明
13.图1是机器人本体结构示意图。
14.图2是机器人本体尾部结构示意图。
15.图3是吊篮整体的结构示意图。
16.图4是吊篮前面的结构示意图。
17.图5是缆线组件结构示意图。
18.图6是缆线组件内部结构示意图。
19.图7是缆线组件背面结构示意图。
20.图8是缆线组件俯视图。
21.图9是操控箱结构示意图。
22.图10是主体机器人传动结构的示意图。
23.其中,机器人本体1,吊篮2、缆线组件3,操控箱4,壳体5,盖板6,传动部件7,滑轨8,三维扫描仪9,外接插口10,云台半球摄像头11,圆灯12,led灯13,单向摄像头14,吊环15,缆线接口16,竖杆17,横杆18,底板19,车横杆20,置车板21,吊钩22,缆线侧板23,缆线顶板24,缆线中板25,大滚轴26,小滚轴27,保护支架28,门档29,车侧杆30,缆线支架31,齿轮盖32,缆线盘33,丝杆34,理线器35,定位杆36,理线滑轮37,航空插头38,电机39,光纤40,供电器41,驱动器42,线座子43,按钮44,齿轮i 45,齿轮ii 46,齿轮iii 47,链条48,固定杆49,滑杆50,支撑杆51,大伸缩杆52,小伸缩杆53,支撑板54,显示屏55,插口56,usb接口57,网络接口58,里程表59,摇杆60,按键61,行走履带62,履带支架63,张紧轮64,驱动轮65,承重轮66。
具体实施方式
24.实施例1:一种引水隧洞检修机器人,由机器人本体1、吊篮2、操控箱4和缆线组件3组成,机器人本体1放置在吊篮2中,缆线组件3通过线缆分别与机器人本体1和操控箱4连接,操控箱4通过电缆与电源连接,电源为机器人本体1和操控箱4提供电能;其中:
25.机器人本体1包括壳体5、盖板6、传动部件7、滑轨8、三维扫描仪9、外接插口10、云台半球摄像头11、圆灯12、led灯13、单向摄像头14、吊环15和缆线接口16,盖板6通过螺钉固定在壳体5上表面,两组滑轨8、每组两条,分别对称焊接固定在盖板6表面两侧和壳体5两侧壁上;传动部件7分为两组,分别固定在壳体5两侧下部;三维扫描仪9焊接固定在盖板6尾端,云台半球摄像头11焊接在盖板6前端,位于盖板6两滑轨8之间;两个圆灯12分别安装在盖板6上的两条滑轨8上,并沿滑轨8滑动;led灯13与单向摄像头14分别安装在壳体5前端与尾部侧壁的左、右两侧;两个吊环15对称固定在壳体5尾部侧壁上,缆线接口16安装在两个吊环15之间的壳体5尾部侧壁上;
26.吊篮2包括竖杆17、横杆18、底板19、车横杆20、置车板21、吊钩22、缆线侧板23、缆线顶板24、缆线中板25、大滚轴26、小滚轴27、小滚轴27支架、保护支架28、门档29和车侧杆30,竖杆17与横杆18焊接固定成一个框架,底板19水平固定在吊篮2底部,车横杆20与车侧杆30连接为矩形焊接在底板19前端,置车板21焊接固定在车横杆20和车侧杆30上,吊钩22焊接在横杆18中部;线缆侧板与缆线顶板24焊接固定在吊篮2尾部,组成线缆框,线缆中板竖直固定在线缆框中间位置;数根大滚轴26水平穿过线缆中板,两端固定在两侧的线缆侧板上;线缆顶板上部固定安装数组滚轴支架,每组滚轴支架上均安装一个小滚轴27;保护支
架28设置在线缆框背部,与缆线侧板23和缆线中板25焊接固定;线缆框侧边底部还设置有门档29,门档29与两端竖杆17底部焊接固定;
27.缆线组件3包括缆线支架31、齿轮盖32、缆线盘33、丝杆34、理线器35、定位杆36、理线滑轮37、航空插头38、电机39、光纤40、供电器41、驱动器42、线座子43、按钮44、齿轮组、链条48、固定杆49、滑杆50、支撑杆51、大伸缩杆52、小伸缩杆53、吊环15和支撑板54,缆线支架31为柱体状,齿轮盖32安装在缆线支架31的右侧板上;缆线盘33固定在缆线支架31中间,缆线盘33的转轴通过螺钉与缆线支架31的左、右侧板固定连接,转轴右端穿出右侧板,缆线盘33上缠绕有缆线;丝杆34水平固定在缆线支架31前端,丝杆34两端分别与缆线支架31的左、右侧板连接,且右端穿过右侧板;定位杆36位于丝杆34上方,与丝杆34平行,定位杆36两端分别于缆线支架31的左、右侧板连接;定位器上部套装在定位杆36上,中部套装在丝杆34上;两根理线滑轮37水平设置在丝杆34下方,两根理线滑轮37相互平行,理线滑轮37的两端分别与缆线支架31的左、右侧板连接;缆线盘33上的缆线从理线器35下部穿过,航空插头38固定在缆线前端头上;电机39固定在缆线支架31的下底板19上,电机39的动力输出轴穿过缆线支架31右侧板,电机39的电源线从缆线盘33的转轴内穿出缆线支架31,光纤40一端从缆线盘33的转轴中穿入;支撑板54水平固定在缆线支架31后部,分别与缆线支架31的左、右侧板及后侧板焊接固定,供电器41、驱动器42和线座子43均固定在支撑板54上;缆线支架31尾部设置有按钮44;齿轮组设置在缆线支架31右侧板外部,包括齿轮i 45、齿轮ii 46和齿轮iii 47,齿轮i 45安装在丝杆34右端,齿轮ii 46为双联齿轮安装在缆线盘33转轴的右端,齿轮iii 47安装在电机39的动力输出轴上,齿轮i 45、齿轮ii 46以及齿轮ii 46、齿轮iii 47分别通过链条48连接实现联动,电机39通过动力输出轴带动齿轮iii 47转动;固定杆49呈中空的矩形状,水平焊接在缆线支架31前端下部,与丝杆34平行,滑杆50穿在固定杆49内部;两根支撑杆51分别焊接在缆线支架31尾端下部两侧;两根大伸缩杆52分别安装在滑杆50两端,两根小伸缩杆53分别安装在两根支撑杆51的外端;四个吊环15分别焊接在缆线支架31顶部四个角上。
28.操控箱4上设置显示屏55、插口56、usb接口57、网络接口58、里程表59、摇杆60和按键61,显示屏55安装在操控箱4侧壁上,显示屏55绕连接点转动,操控箱4下部分别设有插口56、usb接口57、网络接口58、里程表59、摇杆60和按键61,操控箱4侧面设有接缆口和电源线。
29.传动部件7包括行走履带62、履带支架63、张紧轮64、驱动轮65、承重轮66和电机减速器,履带支架63固定在壳体5外侧壁下部,电机减速器安装在壳体5,驱动轮65设置在壳体5后端外部两侧,三个张紧轮64从前至后等距固定在壳体5中部,三个承重轮66从前至后等距固定在壳体5下部,驱动轮65与电机39减速器连接,行走履带62覆盖在驱动轮65、张紧轮64与承重轮66上,驱动轮65带动行走履带62转动,以实现机器人行走,承重轮66提供支撑力,张紧轮64则调整行走履带62的张紧程度。
30.机器人本体1外结构采用在框架上蒙皮方式,其材料为内部框架采用7系列铝合金,蒙皮采用5系列铝合金,整个车体为防水结构,可完全进入水中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。