1.本发明涉及换工件装置、工件搬运装置、加工装置以及环轴承的制造方法、机械的制造方法、车辆的制造方法。
背景技术:
2.在对环状的工件实施磨削等的加工装置中,使由工件搬运路搬运来的工件配置于加工位置,在加工位置实施预定的加工。然后,从加工位置取出加工后的工件并使之返回到工件搬运路,将工件送向后阶段的工序。作为这样的向加工位置搬运工件的机构,广泛地使用了换工件装置、装载装置(例如专利文献1~4)。
3.在专利文献1所记载的换工件装置中,能够分别保持被加工物及加工完成品的保持部设于回转臂的两端部,回转臂绕水平旋转轴间歇地旋转,由此从供排位置附近向加工位置附近搬运由一方的保持部保持的被加工物。并且,与此同时,从加工位置附近向供排位置附近搬运由另一方的保持部保持的加工完成品。
4.在专利文献2中记载有具备行星齿轮装置的装载装置,该行星齿轮装置具有自如进行行星运动的行星齿轮。由于行星齿轮进行行星运动,所以相对于自转中心偏心地设于行星齿轮且与旋转部件及载入部件连结的偏心连结部进行沿着摆线曲线的运动。由此,进行旋转部件的旋转以及载入部件的径向的动作,相对于固定的导向板进行工件的替换动作。
5.在专利文献3中记载了一种具备载入单元的装载装置,该载入单元在工件供给位置供给工件,在工件磨削位置对工件进行磨削加工,在工件排出位置向外部排出磨削加工结束后的工件。在该装载装置中,使工件保持机构在同一时机位于各位置。
6.在专利文献4中记载了一种装载装置,该装载装置具有:能够旋转的支架,其具有相互向相反方向延伸的工件支撑臂;以及工件按压臂,其与支架同轴地旋转。在该装载装置中,利用支架的一方的工件支撑臂和工件按压臂来夹持由固定的导向板支撑并加工后的工件,之后,支架和工件按压臂一起旋转,从而取出加工后的工件。
7.现有技术文献
8.专利文献
9.专利文献1:日本专利第5322123号公报
10.专利文献2:日本专利第3926583号公报
11.专利文献3:日本专利第6312473号公报
12.专利文献4:日本特开平3
‑
196936号公报
技术实现要素:
13.发明所要解决的课题
14.然而,在大量生产的工件的加工装置中,从提高生产率的要求出发,需要缩短替换
工件所需的装载时间。
15.但是,在连续进行工件搬出动作、工件固定分配动作以及工件搬入动作等多个动作的上述的换工件装置、装载装置中,装载时间的缩短存在限度。并且,在加工内容的变更、换产调整时,必须变更装载装置的构造、构件的配置等,缺乏通用性。而且,必须与要加工的工件的形状匹配地更换多个构件,换产调整的作业需要较长的时间。
16.根据这样的情况,作为设为立式磨床用的装载装置,也有将由滚珠丝杠和伺服马达进行的直行动作转换成沿着凸轮形状的槽的路径的移动、从而高速地进行工件的替换动作的装载装置。但是,即使是该装载装置,由于是使工件沿槽形状移动的构造,所以工件的移动方向也受到限制。因此,工件形状的变更等换产调整的作业依然繁杂。
17.本发明的目的在于提供能够高速地进行工件的替换、能够提高通用性且能够抑制换产调整的劳力和时间的换工件装置、工件搬运装置、加工装置以及环轴承的制造方法、机械的制造方法、车辆的制造方法。
18.用于解决课题的方案
19.本发明由下述结构构成。
20.(1)一种换工件装置,在环状的工件的替换位置与加工上述工件的加工位置之间替换上述工件,具备:
21.装载部件,其被支撑为以旋转轴为中心旋转自如,在至少两个部位的径向外缘部设有保持上述工件的工件保持部;
22.装载部件支撑机构,其将上述装载部件支撑为在上述旋转轴的轴向垂直面内移动自如;
23.旋转驱动部,其驱动上述装载部件使之绕上述旋转轴旋转;以及
24.位移驱动部,其驱动上述装载部件支撑机构,使上述装载部件向工件设置状态和工件退避状态位移,上述工件设置状态是上述工件保持部分别配置于上述替换位置和上述加工位置的状态,上述工件退避状态是上述工件保持部配置为远离上述替换位置及上述加工位置的状态,
25.在上述加工位置配置有支撑上述工件的外周的导向板,
26.在上述装载部件支撑机构使上述装载部件从上述工件设置状态成为上述工件退避状态、并再次返回到上述工件设置状态为止的期间,
27.上述位移驱动部和上述旋转驱动部按照使上述装载部件不与上述导向板干涉的轨迹,进行使配置于上述加工位置的上述工件保持部配置于上述替换位置的动作、以及使配置于上述替换位置的上述工件保持部配置于上述加工位置的动作。
28.(2)一种工件搬运装置,具备:
29.(1)的换工件装置;以及
30.工件搬运部,其搬运上述工件,并具有连续供给加工前的工件的工件供给位置和载置加工后的上述工件的工件接收位置,
31.上述取放机构具有交替地进行装载动作和卸载动作的功能,
32.在上述装载动作中,将加工前的上述工件从上述工件供给位置转移给配置于上述装载部件的上述替换位置的上述工件保持部,
33.在上述卸载动作中,将保持于上述装载部件的上述替换位置的上述工件保持部的
加工完毕的工件转移到上述工件接收位置。
34.(3)一种加工装置,具备(1)所述的换工件装置,并对上述工件进行加工。
35.(4)一种环轴承的制造方法,使用(3)所述的加工装置来制造环轴承。
36.(5)一种机械的制造方法,使用(3)所述的加工装置来制造机械。
37.(6)一种车辆的制造方法,使用(3)所述的加工装置来制造车辆。
38.发明的效果如下。
39.根据本发明,能够高速地进行工件的替换,能够提高通用性,而且能够抑制换产调整的劳力和时间。
附图说明
40.图1是滚动轴承的局部剖视立体图。
41.图2是具备第一结构例的换工件装置的工件搬运装置的立体图。
42.图3是表示图2所示的换工件装置的iii
‑
iii截面的剖视图。
43.图4是换工件装置的俯视图。
44.图5的(a)及(b)是说明取放机构所进行的装载动作的简要俯视图。
45.图6的(a)~(e)是说明换工件装置所进行的工件替换动作的简要俯视图。
46.图7的(a)及(b)是说明取放机构所进行的卸载动作的简要俯视图。
47.图8的(a)~(c)是说明对工件进行加工的加工例子以及工件的退避方向的在加工位置处的俯视图。
48.图9是说明具备双轴一体型马达的第二结构例的、沿着马达的轴线方向的简要剖视图。
49.图10是第三结构例的换工件装置的俯视图。
50.图11是第四结构例的换工件装置的俯视图。
51.图12是使用了具备作为环状的工件的外圈及内圈的轴承的马达的简要剖视图。
具体实施方式
52.以下,参照附图对本发明的实施方式进行详细说明。此处,以将滚动轴承的外圈作为工件的情况为一例进行说明,但并不限定于此。
53.<工件>
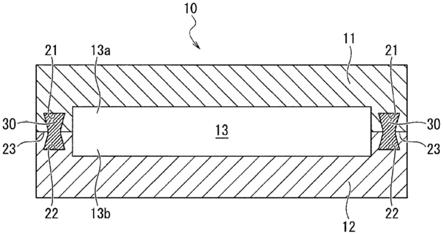
54.图1是滚动轴承的局部剖视立体图。
55.滚动轴承(以下简单地记载为“轴承”)100具备内圈11、外圈13、设置在内圈11与外圈13之间的多个滚动体15、以及将滚动体15保持为滚动自如的保持器17。内圈11是在外周面具有滚动体15的轨道槽(引导面)11a的钢材等金属制的圆环状体。外圈13是在内周面具有滚动体15的轨道槽(引导面)13a的钢材等金属制的圆环状体。
56.<工件搬运装置>
57.[第一结构例]
[0058]
图2是具备第一结构例的换工件装置的工件搬运装置的立体图。图3是表示图2所示的换工件装置的iii
‑
iii截面的剖视图。此处示例的工件w是图1所示的圆环状体的外圈13。
[0059]
如图2所示,本结构例的换工件装置200与搬运工件w的工件搬运部300、将工件w移送到加工位置的取放机构400一起构成工件搬运装置500。工件搬运装置500利用取放机构400将由工件搬运部300从上道工序供给的加工前的工件w移送到立式的加工装置(省略图示)的加工位置p1,将由加工装置进行了加工的加工后的工件w从加工装置排出并返回到工件搬运部300,由工件搬运部300向下道工序搬运。
[0060]
(换工件装置)
[0061]
如图3所示,换工件装置200具备装载部件21、装载部件支撑机构23、旋转驱动部25以及位移驱动部27。
[0062]
如图4所示,装载部件21形成为细长的板状,其中间部由旋转轴31在铅垂方向上支撑,并以该旋转轴31为中心旋转自如。在装载部件21且在径向外缘部的两个部位设有保持工件w的工件保持部33。具体而言,工件保持部33分别设于装载部件21的长度方向的一端部和另一端部的在径向上离旋转轴31等距离的位置。工件保持部33配置于由加工装置对工件w进行加工的加工位置p1和移交工件w来替换的替换位置p2。上述一对工件保持部33通过装载部件21的绕旋转轴31的反转(180
°
旋转)而彼此的位置替换。
[0063]
工件保持部33具有直径比工件w稍大的孔部,从工件保持部33的上方(图3的上方、图4的纸面垂直方向近前)侧拿出放入工件w。在装载部件21的下方设有工作台35。在工作台35形成有供旋转轴31插通的由圆弧状的长孔构成的开口部37(参照图4)。该开口部37形成为以装载部件支撑机构23的下述的回转部43的摆动驱动轴51的中心轴为中心的圆弧状。工件保持部33内的工件w在其下部与工作台35接触的状态下外周面被工件保持部33的内周面保持。若装载部件21绕旋转轴31旋转,则工件w以收纳在工件保持部33内的状态在工作台35的上表面滑动并移动。
[0064]
装载部件支撑机构23利用旋转轴31来支撑装载部件21。并且,装载部件支撑机构23将装载部件21支撑为在旋转轴31的轴向垂直面内移动自如。
[0065]
装载部件支撑机构23具有臂41和回转部43。由对置的一对部件呈箱状地形成的臂41在前端部支撑装载部件21的旋转轴31。回转部43将臂41的与旋转轴31侧相反的一侧的基端部支撑为摆动自如。
[0066]
在臂41的前端部,由与从动带轮47成为一体的轴支撑部45支撑旋转轴31。旋转轴31具有头部和轴部,轴部贯通工作台35的开口部37,且固定于臂41侧的轴支撑部45,头部固定于装载部件21的中间部。从动带轮47收纳在臂41内。
[0067]
如图3所示,回转部43具有形成为筒状的摆动驱动轴51。摆动驱动轴51经由轴承59以能够旋转的方式由设于架台55的支撑筒部57支撑。摆动驱动轴51的上端部与臂41的基端部连结,摆动驱动轴51与臂41构成为一体。由此,臂41的基端部由回转部43支撑为摆动自如。
[0068]
这样,装载部件支撑机构23使设于臂41的前端部的旋转轴31绕回转部43的摆动驱动轴51的轴进行圆弧移动,从而使由旋转轴31支撑的装载部件21在旋转轴31的轴向垂直面内移动。此外,在立式的情况下,使装载部件21在水平面内移动,但旋转轴31的轴向不一定限定于铅垂方向,也可以从铅垂方向倾斜。
[0069]
旋转驱动部25具有旋转驱动轴61、旋转传递部件63以及旋转用马达65。旋转驱动轴61插通到回转部43的摆动驱动轴51的内部,与摆动驱动轴51同轴地配置。旋转驱动轴61
的上下端的附近部分通过轴承67以能够旋转的方式由摆动驱动轴51支撑。在旋转驱动轴61的上端部固定有驱动带轮69。该驱动带轮69收纳在臂41内。旋转传递部件63例如由环状的带构成,挂绕在装载部件21的旋转轴31的从动带轮47与旋转驱动轴61的驱动带轮69之间。旋转用马达65由伺服马达构成,配置于旋转驱动轴61的下方。旋转驱动轴61与旋转用马达65的驱动轴71连结。旋转驱动轴61由旋转用马达65驱动而旋转。旋转传递部件63将旋转驱动轴61的旋转传递到装载部件21的旋转轴31。由此,装载部件21与旋转轴31一体地被驱动而旋转。
[0070]
位移驱动部27具有摆动用马达75、驱动齿轮77以及从动齿轮79。摆动用马达75由外置的伺服马达构成,驱动齿轮77固定于摆动用马达75的驱动轴81。从动齿轮79固定于构成回转部43的摆动驱动轴51的下端部。驱动齿轮77与从动齿轮79相互啮合,将摆动用马达75的旋转传递到摆动驱动轴51。由此,支撑于摆动驱动轴51的臂41通过摆动用马达75的驱动而摆动。此外,作为摆动用马达75,也可以设为内装构造而内置在位移驱动部27的箱体内(未图示)。并且,作为向摆动驱动轴51传递摆动用马达75的旋转力的传递方式,不限定于利用齿轮的传递方式,也可以是利用带的传递方式等其它方式。
[0071]
这样,在换工件装置200中,驱动摆动驱动轴51的摆动用马达75和驱动旋转驱动轴61的旋转用马达65设为能够分别独立地驱动。
[0072]
图4是换工件装置的俯视图。
[0073]
图3所示的位移驱动部27利用摆动用马达75使摆动驱动轴51旋转来使臂41摆动,从而使装载部件21在工件设置状态s1与工件退避状态s2之间位移。在工件设置状态s1下,工件保持部33由装载部件支撑机构23分别配置于替换位置p2和加工位置p1,在工件退避状态s2下,工件保持部33配置为远离替换位置p2及加工位置p1。
[0074]
在将装载部件21设为工件设置状态s1的情况下,在配置一方的工件保持部33的加工位置p1配置有多个导向板91。如图2所示,上述导向板91固定在加工装置的支撑台93上。支撑台93配置于工作台35的下方,固定于支撑台93的导向板91对配置于加工位置p1的工件w的外周进行支撑。
[0075]
加工装置例如具备砂轮等加工工具,该加工工具设为能够沿支撑台93的上表面的面内方向移动(切入),而且能够沿垂直方向上下移动(进给)。加工工具通过相对于配置于加工位置p1的工件w相对移动来对工件w进行加工。
[0076]
在上述结构的换工件装置200中,在装载部件支撑机构23使装载部件21从工件设置状态s1成为工件退避状态s2、并再次返回到工件设置状态s1为止的期间,位移驱动部27和旋转驱动部25进行由以下说明的送出动作和送入动作构成的工件替换动作,替换加工位置p1的工件w。
[0077]
在送出动作中,位移驱动部27和旋转驱动部25按照使装载部件21不与导向板91干涉的轨迹,使配置于加工位置p1的工件保持部33配置于替换位置p2。并且,在送入动作中,位移驱动部27和旋转驱动部25使配置于替换位置p2的工件保持部33配置于加工位置p1。
[0078]
同时进行该送出动作及送入动作,在相对于加工位置p1替换一次工件w时使旋转轴31进行圆弧移动(摆动)的旋转量α比装载部件21的绕旋转轴31的旋转量β(β=180
°
)少。
[0079]
(工件搬运部)
[0080]
如图2所示,工件搬运部300例如由传送带等构成,搬运工件w。工件搬运部300具有
连续供给加工前的工件w的工件供给位置p3和载置加工后的工件w的工件接收位置p4。朝向工件供给位置p3(朝向图2的箭头a方向)搬运从上道工序供给的加工前的工件w。并且,朝向下道工序(朝向图2的箭头b方向)搬运载置于工件接收位置p4的加工后的工件w。工件搬运部300不限定于一条传送带,也可以是多条传送带,只要具有向工件供给位置p3供给工件w并从工件接收位置p4向后阶段搬运工件w的功能即可。
[0081]
(取放机构)
[0082]
取放机构400具备支柱101、拾取支撑体103以及把持机构105。拾取支撑体103被支撑为能够以支柱101为中心摆动及升降。把持机构105支撑于拾取支撑体103的前端。把持机构105具有一对卡盘107,上述卡盘107分别具备向下方延伸的把持销109。把持机构105通过使具备把持销109的卡盘107在水平面内向相互接近或分离的方向移动,来进行工件w的把持和把持解除。
[0083]
该取放机构400在使一对把持销109接近的状态下,使拾取支撑体103下降而将把持销109插入到环状的工件w内。然后,通过使卡盘107相互分离,来在工件w内由一对把持销109从内周侧把持工件w。并且,通过使拾取支撑体103上升,来向上抬起由卡盘107把持的工件w。然后,通过使拾取支撑体103摆动,来使所把持的工件w水平移动。在将工件w配置于移动目的地时,由拾取支撑体103使工件w移动到移动目的地,之后使拾取支撑体103下降而使把持机构105的卡盘107接近。由此,解除把持销109对工件w的把持,将工件w载置于移动目的地。之后,使拾取支撑体103上升而将把持销109从工件w拔出。
[0084]
进行上述的工件移动的取放机构400具有交替地进行工件w的装载动作及卸载动作的功能。
[0085]
装载动作是对配置于工件搬运部300的工件供给位置p3的加工前的工件w进行把持、将其转移并供给到配置于替换位置p2的装载部件21的工件保持部33的供给动作。并且,卸载动作是对配置于替换位置p2的装载部件21的工件保持部33所保持的加工完毕的工件w进行把持、将其转移并排出到工件搬运部300的工件接收位置p4的排出动作。由于该取放机构400所进行的装载动作及卸载动作在加工装置所进行的工件w的加工中进行,所以不会在非加工时间成为等待搬运状态等对生产节拍时间造成影响。
[0086]
<工件搬运装置的动作>
[0087]
接下来,对具备上述换工件装置200的工件搬运装置500的具体动作进行说明。
[0088]
图5的(a)及(b)是说明取放机构400所进行的装载动作的简要俯视图。图6的(a)~(e)是说明换工件装置200所进行的工件替换动作的简要俯视图,图6的(a)示出工件设置状态s1,图6的(c)示出工件退避状态s2。图7的(a)及(b)是说明取放机构400所进行的卸载动作的简要俯视图。
[0089]
(装载动作)
[0090]
如图5的(a)所示,若向工件搬运部300的工件供给位置p3搬运加工前的工件w,则由取放机构400的卡盘107对配置于工件供给位置p3的加工前的工件w进行把持。之后,如图5的(b)所示,拾取支撑体103朝向替换位置p2(朝向图5的(b)的箭头c方向)摆动,将加工前的工件w转移给配置于替换位置p2的装载部件21的工件保持部33。
[0091]
(工件替换动作)
[0092]
如图6的(a)所示,若加工前的工件w被转移给替换位置p2的工件保持部33,并且对
加工位置p1的工件保持部22的工件w进行的加工结束,则开始进行由换工件装置200所进行的送出动作及送入动作构成的工件替换动作。
[0093]
在送出动作中,首先,驱动图3所示的位移驱动部27的摆动用马达75及旋转驱动部25的旋转用马达65。于是,如图6的(b)所示,臂41从工件设置状态s1的位置朝向工件退避状态s2(朝向图6的(b)的箭头d方向)摆动,并且装载部件21向与臂41相同的方向(图6的(b)的箭头e方向)旋转(亦参照图4)。由此,工件设置状态s1的装载部件21一边以图3所示的摆动驱动轴51的轴线l1为中心摆动,一边以旋转轴31的轴线l2为中心旋转。于是,配置于加工位置p1的装载部件21的工件保持部33从加工位置p1脱离,从而由该工件保持部33保持的工件w向远离导向板91的方向移动。之后,如图6的(c)所示,装载部件21成为工件退避状态s2(亦参照图4),从送出动作转变成送入动作。
[0094]
在送入动作中,一边继续由图3所示的旋转驱动部25的旋转用马达65进行的装载部件21的向箭头e方向的旋转,一边使位移驱动部27的摆动用马达75的驱动反转。由此,如图6的(d)所示,臂41朝向工件设置状态s1的位置(朝向图6的(d)的箭头f方向)摆动。于是,保持有加工后的工件w的工件保持部33朝向替换位置p2移动,并且保持有加工前的工件w的工件保持部33朝向加工位置p1移动。此时,为了避免工件w与导向板91的干涉,由未图示的控制装置进行控制,以便在臂41到达工件设置状态s1的位置之前,先使装载部件21从图6的(d)状态起进一步向e方向旋转,之后使臂41到达工件设置状态s1的位置。然后,如图6的(e)所示,若装载部件21成为工件设置状态s1(亦参照图4),则保持有加工完毕的工件w的工件保持部33配置于替换位置p2,并且保持有加工前的工件w的工件保持部33配置于加工位置p1。此时,加工前的工件w在不与导向板91干涉的状态下逐渐地配置于加工位置p1。
[0095]
(卸载动作)
[0096]
如图7的(a)所示,若保持有加工完毕的工件w的装载部件21的工件保持部33配置于替换位置p2,则由工件保持部33保持的加工后的工件w被取放机构400的卡盘107把持。之后,如图7的(b)所示,拾取支撑体103朝向工件接收位置p4(朝向图7的(b)的箭头g方向)摆动,将加工完毕的工件w载置于工件搬运部300的工件接收位置p4。
[0097]
此处,说明在加工位置p1处对工件w进行加工的加工例子以及工件w的退避方向。
[0098]
图8是说明对工件进行加工的加工例子以及工件的退避方向的在加工位置处的俯视图。
[0099]
(内径研磨)
[0100]
如图8的(a)所示,在对工件w的内周面进行研磨的情况下,被驱动而旋转且具有轴截面呈圆形的砂轮的加工工具t配置于加工位置p1,并向由一对导向板91支撑的工件w的内侧进入。并且,通过使加工工具t与工件w的内周面抵接,来进行工件w的内周面的研磨加工。在该加工例子的情况下,若在加工后加工工具t沿轴向(图8的(a)的进深方向)移动,则因工件替换动作的送出动作,工件w向远离各个导向板91的方向(图8的(a)的箭头h1方向)移动。
[0101]
(外径研磨)
[0102]
如图8的(b)所示,在对工件w的外周面进行研磨的情况下,被驱动而旋转且具有轴截面呈圆形的砂轮的加工工具t接近加工位置p1而配置于由一对导向板91支撑的工件w的外侧。然后,通过使加工工具t与工件w的外周面抵接,来进行工件w的外周面的研磨加工。同样,在该加工例子的情况下,若在加工后加工工具t退避,则因工件替换动作的送出动作,工
件w向远离各个导向板91的方向(图8的(b)的箭头h2方向)移动。
[0103]
(其它加工)
[0104]
如图8的(c)所示,在其它各种加工的情况下,工件w也因工件替换动作的送出动作而向远离各个导向板91的方向(图8的(c)中箭头h3方向)移动。
[0105]
这样,工件w从加工位置p1脱离的脱离方向h1、h2、h3按照根据工件w的加工部位、加工工序而不同的导向板91的位置等来适当变更。
[0106]
以上,如上所述,根据本结构,在装载部件支撑机构23使装载部件21从工件设置状态s1成为工件退避状态s2、并再次返回到工件设置状态s1为止的期间,位移驱动部27和旋转驱动部25按照使装载部件21不与导向板91干涉的轨迹,同时进行加工位置p1与替换位置p2之间的工件w的替换。因此,与分别进行装载部件21的移动和旋转的情况相比,能够高速地进行工件w的替换动作,从而能够提高生产率。而且,由于使装载部件21移动的机构全部是旋转机构,所以能够用o形圈等简单地密封滑动部。其结果,能够可靠地防止粉尘、异物进入到滑动面,提高相对于使用环境的自由度。
[0107]
并且,仅变更驱动换工件装置200的各部分的驱动程序,就能够调整由位移驱动部27进行的装载部件支撑机构23的移动以及由旋转驱动部25进行的装载部件21的旋转的时机等。也就是说,能够按照根据工件w的加工部位、加工工序而不同的导向板91的位置等,来将工件w的替换动作时的动作调整为各种路径。因此,即使导向板91的位置等根据工件w的种类、加工内容等而变更,也几乎不需要变更工件搬运装置的构造、各部分的构件的配置,能够简单且迅速地完成调整作业。这样,能够大幅度地提高工件搬运装置的通用性。
[0108]
例如,在现有的盒式装载机等装载装置中,需要进行进槽、出槽的更换或调整、向加工位置搬入及搬出工件的引导板的更换、固定分配限位器的更换等各种构件的更换,换产调整需要大量的劳力和时间。相对于此,在本结构的换工件装置200中,仅更换具有保持工件w的工件保持部33的装载部件21,就能够简单且迅速地应对加工对象的工件w的变更,能够顺畅地进行换产调整的作业。
[0109]
[第二结构例]
[0110]
在上述的第一结构例的换工件装置中,分别独立地设有旋转驱动部25的旋转用马达65和位移驱动部27的摆动用马达75,但作为旋转驱动部25及位移驱动部27的马达,也可以使用双轴一体型马达。
[0111]
图9是说明具备双轴一体型马达的第二结构例的、沿着马达的轴线方向的简要剖视图。
[0112]
如图9所示,双轴一体型马达600具有圆筒状的基座110、在基座110的内周侧构成的内轴转子111、以及在基座110的外周侧构成的外轴转子113。该双轴一体型马达600的旋转用马达65具有内轴转子111,摆动用马达75具有外轴转子113。
[0113]
内轴转子111具有:设于基座110的内侧的转子磁轭121;沿转子磁轭121的外周面呈环状地配置的多个磁铁123;以及设于基座110的内周面的芯部125。转子磁轭121在基座110的上端部由滚动轴承127支撑为能够旋转,且在该转子磁轭121的上端部连结旋转驱动轴61。芯部125由铁心125a和卷绕于铁心125a的线圈125b构成。
[0114]
外轴转子113具有:设于基座110的外侧的转子磁轭131;沿转子磁轭131的内周面呈环状地配置的多个磁铁133;以及设于基座110的外周面的芯部135。转子磁轭131在基座
110的上端部由滚动轴承137支撑为能够旋转,且在该转子磁轭121的上端部连结摆动驱动轴51。芯部135由铁心135a和卷绕于铁心135a的线圈135b构成。
[0115]
将该内轴转子111的转子磁轭121与图3所示的旋转驱动轴61连结,且将外轴转子113的转子磁轭131与图3所示的摆动驱动轴51连结。
[0116]
并且,内轴转子111通过向芯部125的线圈125b的电力供给,驱动转子磁轭121使之相对于基座110旋转。并且,外轴转子113通过向芯部135的线圈135b的电力供给,驱动转子磁轭131使之相对于基座110旋转。通过使外轴转子113的转子磁轭131旋转,来使旋转驱动轴61旋转,该旋转传递到旋转轴31,从而使装载部件21旋转。
[0117]
并且,外轴转子113通过向芯部135的线圈135b的电力供给,驱动转子磁轭131使之相对于基座110旋转。通过使外轴转子113的转子磁轭131旋转,来使摆动驱动轴51旋转,使臂41摆动,从而使装载部件21移动。
[0118]
如本结构所述,若使用双轴一体型马达600作为旋转驱动部25及位移驱动部27的驱动用的马达,则能够实现装置的小型化。
[0119]
[第三结构例]
[0120]
接下来,对换工件装置200的第三结构例进行说明。
[0121]
此外,对与上述结构的换工件装置200相同的构成部分标注同一符号并省略说明。
[0122]
图10是第三结构例的换工件装置的俯视图。
[0123]
如图10所示,在本结构的换工件装置200a中,装载部件支撑机构23a具备第一直动台141和第二直动台143。第一直动台141具有滑块141a和移动轨道141b,第二直动台143具有滑块143a和移动轨道143b。
[0124]
第一直动台141的滑块141a支撑装载部件21的旋转轴31。第一直动台141通过使滑块141a沿移动轨道141b移动,来使装载部件21沿x方向移动。第二直动台143的滑块143a一体地支撑第一直动台141的移动轨道141ba。第二直动台143通过使滑块143a沿移动轨道143b移动,来使装载部件21沿y方向移动。
[0125]
由此,在本结构的换工件装置200a中,能够使装载部件21在旋转轴31的轴向垂直面内(水平面内)独立地沿x方向和y方向移动。因而,能够抑制移动方向的制约而高效地实现使装载部件21在工件设置状态s1与工件退避状态s2之间移动的工件替换动作。
[0126]
因此,根据本结构的换工件装置200a,能够利用第一直动台141和第二直动台143使滑块141a所搭载的装载部件21的旋转轴31在水平面内向任意方向自如地移动,能够使装载部件21按照任意轨迹移动而不限定于圆弧轨迹。因而,能够使装载部件21避免与导向板91等周围部件的干涉,而高效地向工件设置状态s1及工件退避状态s2位移。
[0127]
[第四结构例]
[0128]
图11是第四结构例的换工件装置的俯视图。
[0129]
如图11所示,本结构的换工件装置200b具备在俯视时大致呈三角形的装载部件21a,其中心由旋转轴31支撑而旋转。该装载部件21a在作为旋转的径向外缘部的三个部位的角部设有工件保持部33。
[0130]
在本结构的换工件装置200b中,在一个工件保持部33配置于加工位置p1的状态下,其它两个工件保持部33分别配置于不同的替换位置p2a、p2b。因此,当在加工位置p1对工件w进行加工的过程中,取放机构400能够通过装载动作向一方的替换位置p2a的工件保
持部33供给加工前的工件w,并且通过卸载动作从另一方的替换位置p2b的工件保持部33排出加工后的工件w。这样,能够同时实施装载动作和卸载动作,从而例如在工件w的加工时间比依次实施上述的装载动作和卸载动作的工件替换的合计时间短的情况下,能够抑制在非加工时间成为等待搬运状态,能够缩短生产节拍时间。由此,能够提高作业效率而提高生产率。
[0131]
以上说明的各结构例的换工件装置例如能够应用于对图12所示的支撑马达700的旋转轴163的轴承100a、100b等的内圈11a、11b、外圈13a、13b等环状的工件进行移动、搬运的工件搬运装置、具备该工件搬运装置的工件加工装置、以及制造环轴承的环轴承制造装置等。
[0132]
此处例示的马达700是无刷马达,具有圆筒形的中心壳体165和封堵该中心壳体165的一方的开口端部的大致圆板状的前壳体167。在中心壳体165的内侧,沿其轴心经由配置于前壳体167及中心壳体165的底部的轴承100a、100b支撑有旋转自如的旋转轴163。在旋转轴163的周围设有马达驱动用的转子169,在中心壳体165的内周面固定有定子171。
[0133]
上述结构的马达700通常搭载于机械、车辆,驱动由轴承100a、100b支撑的旋转轴163使之旋转。
[0134]
除此之外,还能够在对具有旋转部的机械、各种制造装置例如滚珠丝杠装置等丝杠装置以及促动器(直动引导轴承与滚珠丝杠的组合、xy工作台等)等直动装置的旋转支撑部、或者转向柱、万向接头、中间齿轮、齿轮齿条机构、电动助力转向装置以及蜗轮减速器等转向操纵装置的旋转支撑部、还有汽车、摩托车、铁路等车辆的旋转支撑部等环状的工件进行移动、搬运或者加工时应用。这样,若在相对旋转的部位应用环状的构成部件(工件),则能够在上述的各装置中适当地使用,通过使用各装置来制造构成部件,能够提高生产率以及产品品质。
[0135]
这样,本发明并不限定于上述的实施方式,将实施方式的各结构相互组合的实施方式、本领域技术人员基于说明书的记载以及公知技术进行变更、应用的实施方式也是本发明所预定的,包括在要求保护的范围内。
[0136]
对上述的加工装置是立式结构的情况进行了说明,但也能够是卧式结构。立式的加工装置与卧式的情况相比,工具驱动用马达在上下方向上的配置自由度更高,能够实现装置整体的小型化,因此优选。并且,由于使工件水平移动到加工装置的加工位置来进行替换,所以与使工件上下移动来进行替换的卧式的换工件装置相比,难以受到重力的影响,工件的移动路径的设计自由度更高。
[0137]
如上所述,在本说明书中公开了以下事项。
[0138]
(1)一种换工件装置,在环状的工件的替换位置与加工上述工件的加工位置之间替换上述工件,具备:
[0139]
装载部件,其被支撑为以旋转轴为中心旋转自如,在至少两个部位的径向外缘部设有保持上述工件的工件保持部;
[0140]
装载部件支撑机构,其将上述装载部件支撑为在上述旋转轴的轴向垂直面内移动自如;
[0141]
旋转驱动部,其驱动上述装载部件使之绕上述旋转轴旋转;以及
[0142]
位移驱动部,其驱动上述装载部件支撑机构,使上述装载部件向工件设置状态和
工件退避状态位移,上述工件设置状态是上述工件保持部分别配置于上述替换位置和上述加工位置的状态,上述工件退避状态是上述工件保持部配置为远离上述替换位置及上述加工位置的状态,
[0143]
在上述加工位置配置有支撑上述工件的外周的导向板,
[0144]
在上述装载部件支撑机构使上述装载部件从上述工件设置状态成为上述工件退避状态、并再次返回到上述工件设置状态为止的期间,
[0145]
上述位移驱动部和上述旋转驱动部按照使上述装载部件不与上述导向板干涉的轨迹,进行使配置于上述加工位置的上述工件保持部配置于上述替换位置的动作、以及使配置于上述替换位置的上述工件保持部配置于上述加工位置的动作。
[0146]
根据该换工件装置,在装载部件支撑机构使装载部件从工件设置状态成为工件退避状态、并再次返回到工件设置状态为止的期间,位移驱动部和旋转驱动部按照使装载部件不与导向板干涉的轨迹,同时进行加工位置与替换位置之间的工件的替换。
[0147]
因此,能够高速地进行工件的替换动作,提高生产率。并且,不需要根据导向板的位置等来变更装置的构造、构件的配置,能够提高通用性。而且,仅通过更换具有工件保持部的装载部件、变更驱动程序,就能够简单且迅速地应对工件、加工内容的变更,能够大幅度地抑制换产调整所需的劳力和时间。
[0148]
(2)根据(1)所述的换工件装置,
[0149]
在上述装载部件的长度方向的一端部和另一端部,且在径向上离上述旋转轴等距离的位置分别设有上述工件保持部,
[0150]
一对上述工件保持部通过绕上述旋转轴的反转来替换彼此的位置。
[0151]
根据该换工件装置,通过以使工件保持部的位置反转的方式使装载部件旋转,能够在加工位置与替换位置之间简单地替换工件保持部。
[0152]
(3)根据(1)或(2)所述的换工件装置,
[0153]
上述装载部件支撑机构使上述旋转轴进行圆弧移动。
[0154]
根据该换工件装置,通过装载部件支撑机构使支撑装载部件的旋转轴进行圆弧移动,从而能够使装载部件简单且准确地向工件设置状态及工件退避状态位移。
[0155]
(4)根据(3)所述的换工件装置,
[0156]
上述装载部件支撑机构具备:
[0157]
臂,其在前端部支撑上述装载部件的上述旋转轴;以及
[0158]
回转部,其将上述臂的基端部支撑为摆动自如。
[0159]
根据该换工件装置,通过使由回转部支撑的臂摆动,能够使由臂的前端部支撑的装载部件简单且准确地向工件设置状态及工件退避状态位移。
[0160]
(5)根据(3)或(4)所述的换工件装置,
[0161]
在替换一次上述工件时使上述旋转轴进行圆弧移动的旋转量比上述装载部件绕上述旋转轴的旋转量少。
[0162]
根据该换工件装置,通过在工件的替换动作时,将使旋转轴进行圆弧移动的旋转量设为比装载部件绕旋转轴的旋转量少,从而旋转轴的圆弧驱动成为必要最小限度的旋转量,能够加快工件的替换速度。并且,能够将马达等驱动源分别选定为最佳的驱动源。
[0163]
(6)根据(4)所述的换工件装置,
[0164]
在上述回转部,同轴地配置有使上述臂摆动的摆动驱动轴和驱动上述装载部件的上述旋转轴的旋转驱动轴,
[0165]
在上述臂,配置有从上述旋转驱动轴向上述装载部件的上述旋转轴传递旋转的旋转传递部件。
[0166]
根据该换工件装置,通过同轴地配置使臂摆动的摆动驱动轴和驱动装载部件的旋转轴的旋转驱动轴,能够实现装置的小型化。并且,通过在臂设置从旋转驱动轴向装载部件的旋转轴传递旋转的旋转传递部件,能够实现装载部件支撑机构的构造的简化以及小型化。而且,与在臂的前端设置用于使旋转轴旋转的马达等的情况相比,能够通过臂的轻量化来实现移动的高速化。另外,不需要在臂设置朝向驱动源的供电线、编码器电缆等电线,能够简化构造而降低成本,并且能够消除由电线的疲劳、磨损等引起的断线的不良情况而提高可靠性。
[0167]
(7)根据(6)所述的换工件装置,
[0168]
驱动上述摆动驱动轴的摆动用马达和驱动上述旋转驱动轴的旋转用马达设为能够分别独立地驱动。
[0169]
根据该换工件装置,通过分别独立地控制摆动用马达及旋转用马达,能够分别独立地控制臂的摆动以及装载部件的旋转。因此,能够细微地调整工件的替换动作,从而能够顺畅地应对防止导向板的位置等的干涉。
[0170]
(8)根据(7)所述的换工件装置,
[0171]
上述摆动用马达和上述旋转用马达由双轴一体型马达构成,该双轴一体型马达具有分别设为能够旋转且旋转方向配置为相同的内轴转子和外轴转子,
[0172]
上述摆动用马达和上述旋转用马达中的一方驱动上述内轴转子,另一方驱动上述外轴转子。
[0173]
根据该换工件装置,通过使用双轴一体型马达作为驱动摆动驱动轴的摆动用马达以及驱动旋转驱动轴的旋转用马达,能够实现装置的小型化,而且通过动力传递部件等的构造的简化,能够实现低成本化。
[0174]
(9)根据(1)~(3)任一项中所述的换工件装置,
[0175]
上述装载部件支撑机构具备:
[0176]
滑块,其支撑上述装载部件的上述旋转轴;以及
[0177]
直动台,其将上述滑块支撑为在上述旋转轴的轴向垂直面内直动自如。
[0178]
根据该换工件装置,通过由直动台使滑块在旋转轴的轴向垂直面内移动,能够使装载部件简单且准确地向工件设置状态及工件退避状态位移。
[0179]
(10)根据(1)~(9)任一项中所述的换工件装置,
[0180]
上述装载部件支撑机构使被支撑为上述旋转轴成为铅垂方向的上述装载部件在水平面内移动。
[0181]
根据该换工件装置,通过用于立式的加工装置,与卧式的情况相比,工具驱动用马达在上下方向上的配置自由度更高,能够实现装置整体的小型化。并且,由于使工件水平移动到加工装置的加工位置来进行替换,所以与使工件上下移动来进行替换的卧式的换工件装置相比,难以受到重力的影响,工件的移动路径的设计自由度更高。
[0182]
(11)根据(1)~(10)任一项中所述的换工件装置,
[0183]
还具备取放机构,该取放机构向配置于上述装载部件的上述替换位置的上述工件保持部供给加工前的工件,并排出加工后的工件。
[0184]
根据该换工件装置,通过具备取放机构,能够迅速地进行替换位置的加工前的工件的供给以及加工后的工件的排出。并且,通过在工件的加工中进行该工件的替换动作,不会对生产节拍时间造成影响。
[0185]
(12)一种工件搬运装置,具备:
[0186]
(11)的换工件装置;以及
[0187]
工件搬运部,其搬运上述工件,并具有连续供给加工前的工件的工件供给位置和载置加工后的上述工件的工件接收位置,
[0188]
上述取放机构具有交替地进行装载动作和卸载动作的功能,
[0189]
在上述装载动作中,将加工前的上述工件从上述工件供给位置转移给配置于上述装载部件的上述替换位置的上述工件保持部,
[0190]
在上述卸载动作中,将保持于上述装载部件的上述替换位置的上述工件保持部的加工完毕的工件转移到上述工件接收位置。
[0191]
根据该工件搬运装置,通过由取放机构交替地进行装载动作和卸载动作,来自动地进行加工前工件从工件供给位置向替换位置的转移以及加工完毕工件从替换位置向工件接收位置的转移。由此,能够顺畅地实施工件搬运部与换工件装置之间的工件的移交。并且,仅变更工件搬运部中的工件供给位置、工件接收位置处的工件的定位构件等,就能够相对于工件的变更简单地进行换产调整。
[0192]
(13)一种加工装置,具备(1)~(11)任一项中所述的换工件装置,并对上述工件进行加工。
[0193]
根据该加工装置,能够高速地向加工位置替换环状的工件,从而能够提高对工件的加工效率,提高生产率。
[0194]
(14)一种环轴承的制造方法,使用(13)所述的加工装置来制造环轴承。
[0195]
(15)一种机械的制造方法,使用(13)所述的加工装置来制造机械。
[0196]
(16)一种车辆的制造方法,使用(13)所述的加工装置来制造车辆。
[0197]
根据该环轴承、机械、车辆的制造方法,能够简单且迅速地进行向加工位置替换各轴承构件的替换动作,从而能够提高生产率。
[0198]
此外,本技术基于2019年3月12日提交的日本专利申请(日本特愿2019
‑
44821),其内容在本技术中作为参照来引用。
[0199]
符号的说明
[0200]
21—装载部件,23—装载部件支撑机构,25—旋转驱动部,27—位移驱动部,31—旋转轴,33—工件保持部,41—臂,43—回转部,51—摆动驱动轴,61—旋转驱动轴,63—旋转传递部件,65—旋转用马达,75—摆动用马达,91—导向板,111—内轴转子,113—外轴转子,141—第一直动台,141a—滑块,141b—移动轨道,143—第二直动台,143a—滑块,143b—移动轨道,200、200a、200b—换工件装置,300—工件搬运部,400—取放机构,500—工件搬运装置,600—双轴一体型马达,p1—加工位置,p2—替换位置,p3—工件供给位置,p4—工件接收位置,s1—工件设置状态,s2—工件退避状态,w—工件,α、β—旋转量。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。