1.本发明涉及一种头戴式显示设备,且特别是涉及一种可提升眼球追踪准确度的头戴式显示设备。
背景技术:
2.随着电子科技的进步,可提供高维度显示能力的头戴式显示装置成为一种新的趋势。头戴式显示装置可提供虚拟现实、扩增实境以及混合实境等多种视觉体验,在多种领域的应用上,都有革命性的贡献。
3.在头戴式显示装置的技术领域中,针对使用者的眼球状态进行追踪,是一个重要的课题。在现有技术领域中,可通过发光二极管投射光束至眼球上,并通过眼球上反射的光点,来执行眼球的追踪动作。
4.基于每个使用者头型的不相同,当配戴头戴式显示装置时,使用者的眼球与头戴式显示装置的成像透镜间的距离可能有所不同。在这样的情况下,当使用者的眼球过度靠近头戴式显示装置的成像透镜时,作为眼球追踪的发光二极管所投射的光束,可能只能有效的照射到眼球的部分范围。如此一来,在部分范围未能有效被光束照射到的情况下,所进行的眼球追踪动作的准确度可能大打折扣,降低头戴式显示装置的使用效能。
技术实现要素:
5.本发明是针对一种可提升眼球追踪的准确度的头戴式显示设备。
6.根据本发明的实施例,头戴式显示设备包括管体、第一光束产生器、第二光束产生器、影像提取器以及控制器。第一光束产生器设置在管体外,投射多个第一光束至目标区的第一范围。第二光束产生器设置在管体内,投射第二光束至目标区的第二范围。影像提取器提取目标区上的影像以产生影像信息。控制器接收影像信息,并依据影像信息以进行眼球追踪动作。其中第二范围为目标区的中心范围,第一范围为目标区的周围范围。
7.基于上述,本发明的头戴式显示设备通过分别设置在管体外以及内的不同的光束产生器,并用于投射光束至目标区的周围范围以及中心范围。在当目标区过度接近管体时,第二光束产生器可通过投射第二光束至目标区的中心范围以补足目标区的中心范围所产生的光点的亮度,可提升眼球追踪的准确度。
附图说明
8.包含附图以便进一步理解本发明,且附图并入本说明书中并构成本说明书的一部分。附图说明本发明的实施例,并与描述一起用于解释本发明的原理。
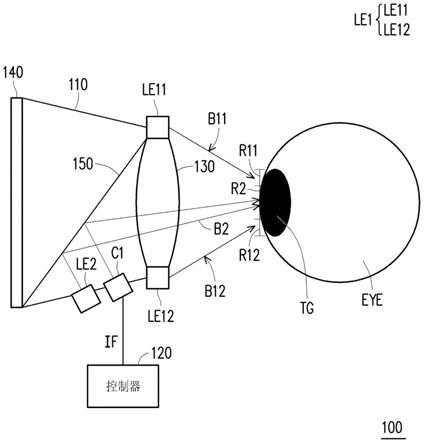
9.图1为本发明一实施例的头戴式显示装置的侧视示意图;
10.图2为本发明实施例的头戴式显示装置的示意图;
11.图3a至图3d为本发明实施例的补光动作的示意图;
12.图4为本发明实施例的头戴式显示装置的补光动作的流程图;
13.图5为本发明一实施例的影像信息的示意图;
14.图6为本发明实施例的头戴式显示装置的眼球追踪功能的流程图;
15.图7为眼球的角膜的曲率以及眼球与透镜间的距离的计算方法的示意图。
16.附图标号说明
17.100、200:头戴式显示设备;
18.110:管体;
19.120:控制器;
20.130、230:透镜;
21.140:显示面板;
22.150:反射镜;
23.a1、a2、cl1~cl3:连线;
24.a3:切线;
25.b11、b12、b2:光束;
26.c:光心;
27.c1:影像提取器;
28.d
l
、d
s
、d
c
、d1~d4:距离;
29.eye:眼球;
30.i1、i3:子亮度;
31.i2:平均亮度;
32.if、if1~if4:影像信息;
33.l
11
*、l
12
*、l2*:光点影像;
34.l
11’、l
12’、l2’
:位置;
35.le1、le11、le12、le2:光束产生器;
36.o:球心;
37.pa:屏幕;
38.r:曲率半径;
39.r11、r12、r1:周围范围;
40.r2:中心范围;
41.ra11、ra12:子范围;
42.s410~s460、s610~s660:步骤;
43.tg:目标区。
具体实施方式
44.现将详细地参考本发明的示范性实施例,示范性实施例的实例说明于附图中。只要有可能,相同组件符号在附图和描述中用来表示相同或相似部分。
45.请参照图1,图1为本发明一实施例的头戴式显示装置的侧视示意图。头戴式显示装置100包括管体110、光束产生器le1、le2、影像提取器c1、控制器120、透镜130以及显示面板140。在本实施例中,透镜130设置在管体110邻近于目标区tg的第一侧边。管体110远离目标区tg的第二侧边上则设置显示面板140。上述的第一侧边与第二侧边相对。
46.在另一方面,光束产生器le1包括两个部分的光束产生器le11、le12。光束产生器le1的各个部分的光束产生器le11、le12可包括一个或多个发光二极管,在本实施例中,上述的发光二极管可以为红外线发光二极管。光束产生器le11、le12分别设置在透镜130的上边缘以及下边缘,并分别投射光束b11、b12至目标区tg的周围范围r11、r12。
47.此外,光束产生器le2设置在管体110的内部,并用以投射光束b2。在本实施例中,管体110中设置反射镜150。通过反射镜150,光束产生器le2可使光束b2经反射以投射至目标区tg的中心范围r2。光束产生器le2包括一个或多个发光二极管,并可为红外线发光二极管。反射镜150则可为红外线反射镜。
48.影像提取器c1可以为红外线照相机。影像提取器c1设置在管体110内,并通过反射镜150以提取目标区tg的影像信息。影像提取器c1耦接至控制器120,并用以将影像信息if传送至控制器120。控制器120则可针对影像信息if进行分析。在当用户的眼球eye位在目标区tg上时,控制器120可依据影像信息if来进行眼球eye的追踪动作。
49.在本实施例中,控制器120可以为具运算能力的处理器。或者,控制器120可以是通过硬件描述语言(hardware description language,hdl)或是其他任意本领域具通常知识者所熟知的数字电路的设计方式来进行设计,并通过现场可编程逻辑门数组(field programmable gate array,fpga)、复杂可编程逻辑装置(complex programmable logic device,cpld)或是特殊应用集成电路(application-specific integrated circuit,asic)的方式来实现的硬件电路。
50.关于本发明实施例的头戴式显示装置的动作细节,请参照图2为本发明实施例的头戴式显示装置的示意图,以及图3a至图3d为本发明实施例的补光动作的示意图。在图2中,头戴式显示装置200中的影像提取器可针对目标区上的眼球eye进行影像提取动作,在理想状态下,可获得如图3a中的影像信息if1。
51.在当使用者的眼球eye过于贴近头戴式显示装置200的透镜230时,设置在透镜230边缘的光束产生器le11、le12所投射的光束所涵盖的范围,将无法有效的涵盖到眼球eye所在的目标区的中央范围r2。此时,头戴式显示装置200中的影像提取器针对目标区上的眼球eye进行影像提取动作,可获得如图3b的影像信息if2。在影像信息if2中,可以明显看到使用者眼球eye的部分因为亮度过低,而产生难以识别眼球eye上的光点的现象。
52.在本发明实施例中,头戴式显示装置200可通过启动设置在管体内的光束产生器,以投射光束b2,并通过光束b2以针对目标区的中央范围r2进行补光的动作。在当光束b2被产生后,头戴式显示装置200可提取到影像信息if3,其中影像信息if3中的眼球eye部位的亮度已被提高。
53.附带一提的,在影像信息if3中,眼球eye上可能具有因透镜230而产生的杂散光。
54.接着,在图3d中,头戴式显示装置200的控制器可针对影像信息if3执行消除杂散光的动作,并用于获得影像信息if4。进一步的,控制器可通过影像信息if4中眼球上的光点,来判断出眼球eye的位置。
55.以下请同步参照图1以及图4,其中图4为本发明实施例的头戴式显示装置的补光动作的流程图。其中,在步骤s410中,补光设定开始。在此时,头戴式显示装置100中,设置在管体110内用以投射光束b2至目标区tg的中心范围r2的光束产生器le2未被启动,而仅启动投射光束b11、b12至目标区tg的外围范围r11、r12的光束产生器le11、le12。接着,在步骤
s420中,针对影像信息分成三个区域,并计算影像信息中的光强度。细节上请同步参照图1、图4以及图5,其中图5为本发明一实施例的影像信息的示意图。在图5中,控制器120可依据影像信息if的位置,可以影像信息if为中心范围r2以及包括两个子范围ra11、ra12的周围范围r1。其中,中心范围r2在子范围ra11、ra12之间。而在步骤s420中,控制器120可针对中心范围r2的平均光强度进行计算,以获得平均亮度i2,并分别针对子范围ra11、ra12的平均光强度进行计算,以分别获得子亮度i1以及i3。进一步,控制器120可计算平均亮度i2的两倍与子亮度i1以及i3的总和的比值(=(2
×
i2)/(i1 i3)),并依据判断上述的比值有无小于一预设的临界值,来决定是否启动补光的动作(步骤s430)。
56.在步骤s430中,当上述的比值小于预设的临界值时,控制器120可启动补光的动作,并启动设置在管体110内的光束产生器le2,来投射补光用的光束b2至目标区tg的中心范围r2,接着执行步骤s440。相对的,若上述的比值不小于预设的临界值时,则无需启动补光动作,并可结束补光设定(步骤s460)。本实施例的预设的临界值可以为80%。
57.在步骤s440,影像提取器c1可重新针对目标区tg进行影像提取动作,控制器120再依据新的影像信息计算中心范围r2的平均亮度与子范围ra11、ra12的平均亮度的比值。接着,在步骤s450中,控制器120则依据更新后的比值的大小,来执行补光用的光束的亮度调整动作(步骤s450)。在本发明一实施例中,当上述更新后的比值小于80%,表示补光用的光束的亮度需调高。在另一方面,当上述更新后的比值大于120%,表示补光用的光束的亮度需调低。对应于上述,控制器120可通过发送命令,以驱使光束产生器le2以调整光束b2的光强度(亮度)。
58.上述依据80%以及120%来与比值相比较的动作中,80%以及120%的数值仅只是说明用的范例,并非用来限缩本发明范畴。本领域具通常知识者可以依据实际的需求来设定比值的比较依据,没有特定的限制。
59.以下请同步参照图1以及图6,其中图6为本发明实施例的头戴式显示装置的眼球追踪功能的流程图。在步骤s610中,启动眼球追踪功能。接着,在步骤s620中,头戴式显示装置100可先开启作为补光动作,设置在管体110内的光束产生器(发光二极管led)le2,并关闭设置在管体110外,用来照明的光束产生器(发光二极管led)le11、le12。接着,在步骤s630中,使影像提取器c1提取目标区tg中的眼球eye的影像信息。控制器120可依据中心范围被点亮的影像信息,来计算出瞳孔信息(瞳孔的位置以及大小)。
60.在步骤s640中,头戴式显示装置100使设置在管体110内的光束产生器(发光二极管led)le2被关闭,且使设置在管体110外用来照明的光束产生器(发光二极管led)le11、le12被启动。并在步骤s650中,通过提取眼球eye的影像信息,以获得眼球eye上的光点信息,并计算眼睛的位置以及视线方向。
61.步骤s660中判断眼球追踪动作是否结束,若眼球追踪动作未结束,重新执行步骤s620。步骤s660的判断动作可依据头戴式显示装置100的眼球追踪需求是否已经结束,并在当头戴式显示装置100不需要进行用户的眼球位置进行追踪时,结束此流程。
62.进一步来说明,本发明的头戴式显示装置还可依据所提取的影像信息,来计算用户的眼球的角膜的曲率,以及眼球与透镜间的距离。
63.请参照图7为的眼球的角膜的曲率以及眼球与透镜间的距离的计算方法的示意图。在图7中,影像提取器中影像提取器的光心c与屏幕pa间具有距离d
s
,设置在管体外的光
束产生器le11、le12的连线a1与光心c间具有最短的距离d
c
,而设置在管体内的光束产生器le2与连接线a1间则具有最短的距离d
l
。其中,光束产生器le2不与光束产生器le11、le12共平面,因此距离d
l
不等于0。屏幕pa上可产生影像信息,影像信息中具有光点影像l
11
*、l
12
*以及l2*。光点影像l
11
*、l
12
*以及l2*分别对应光束产生器le11、le12以及光束产生器le2所提供的光束在眼球eye上所产生的光点。上述的距离d
s
、d
c
以及d
l
都是已知且固定的参数。
64.在另一方面,眼球eye的角膜是球形并具有曲率半径r以及球心o。眼球eye与光束产生器le11、le12的连线a1间具有最短的距离d1(等于眼球eye球面切线a3与连线a1间的距离)。并且,光束产生器le11、le12、le2提供的光束,可分别在眼球eye中不同的位置l
11’、l
12’以及l2’
上成像,其中位置l
11’、l
12’与位置l2’
不共平面。另外,位置l
11’、l
12’的连线a2以及切线a3间具有最短的距离d2,位置l2’
以及切线a3间则具有最短的距离d4,而切线a3与光束产生器le2间则具有最短的距离d3。上述的距离d1~d4皆为可变动的参数。
65.本发明实施例可通过成像公式法来计算出角膜的曲率半径r以及距离d1。首先,设定一个假定平面,此假定平面与连线a1平行,并与一z轴相垂直。接着,在图7上定位出连线a2。依据光心c与光点影像l
11
*产生第一连线cl1,光心c与光点影像产生第二连线cl2,并用于计算出第一连线cl1与连线a2的交点(位置l
11’),以及第二连线cl2与连线a2的交点(位置l
12’)。球心o是位置le11与位置l
11’的连线和位置le12与位置l
12’的连线这两条线的交点。
66.球心o至连线a2间的最短距离可等于曲率半径r减去距离d2。而连线a1与a2间的最短距离则等于距离d1 d2。再依据成像公式可获得数学式:1/d1 1/d2=2/r。针对上述的关系进行解联立方程式,可以计算出距离d1、d2以及曲率半径r。
67.再依据光心c与光点影像l2*产生第三连线cl3,并计算出球心o与光束产生器le2间的连线与第三连线cl3间的交点,可以获得位置l2’
。其中,距离d3=距离d
l
距离d1,且依据成像公式1/d3 1/d4=2/r,可以解出距离d4。
68.基于上述的连线a2在计算的初始时是假定的,而未必是设置在正确的位置上,因此需要执行进一步的验证动作。在此,依据位置l2’
以及球心o产生一向量,并使此向量与z轴进行内积运算,并将运算的结果减去(曲率半径r-距离d4)来产生一误差值。再当误差值不等于0或大于一容忍值时,可通过调整连线a2的位置,并重新执行前述运算以解出新的距离d1~d4以及曲率半径r,直到误差值等于0或小于容忍值。
69.如此一来,本发明实施例的头戴式显示装置可有效计算出眼球的角膜的曲率,以及眼球与透镜间的距离,提升眼球追踪动作的效率。
70.上述利用成像公式法来计算出眼球的角膜的曲率以及眼球与透镜间的距离仅只是说明用的范例,不用以限缩本发明的范畴。本发明实施例的头戴式显示装置也可应用其他的计算方式,来获得眼球的角膜的曲率以及眼球与透镜间的距离。
71.综上所述,本发明通过在头戴式显示器的壳体内外,分别设置不同的光束产生器,并在执行眼球追踪动作时,使光束产生器分别投射光束至目标区的外围范围以及中心范围。如此一来,目标区中的所有范围都可以具有足够高的亮度,可以有效执行眼球的追踪动作。
72.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进
行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
