1.本实用新型涉及望远镜支架领域,更具体地说涉及一种用于宏基站勘察的望远镜支架。
背景技术:
2.目前在宏基站上勘察,需要工作人员需要手持望远镜进行观测,弊端是人员手拿望远镜观测时望远镜容易抖动,不易观测。
技术实现要素:
3.本实用新型克服了现有技术中的不足,提供了一种用于宏基站勘察的望远镜支架。
4.一种用于宏基站勘察的望远镜支架,包括望远镜夹持装置、前后转向装置、角度转向装置和升降装置,所述望远镜夹持装置、所述转向装置、所述角度转向装置、所述升降装置从上至下依次设置,所述望远镜夹持装置与所述转向装置、所述角度转向装置、所述升降装置通过连接杆相连,所述望远镜夹持装置包括架体、左挡臂和右挡臂,所述左挡臂的端部从所述架体的侧壁上穿出,所述左挡臂的端部设有第一挡块,所述第一挡块与所述架体之间的所述左挡臂上设有弹簧,所述左挡臂的尾端设有把手,所述右挡臂的端部设有第二挡块,所述右挡臂的尾部与所述架体相固定。
5.由上述任一方案优选地是,所述连接杆上的从上至下依次设有前后旋转装置和角度转向装置。
6.由上述任一方案优选地是,所述前后旋转装置包括旋转底座、旋转块和转动轴,所述旋转块的一端穿设固定在所述转动轴上,所述旋转块的另一端与所述架体的底部固定连接,所述转动轴从所述旋转底座的底部穿设出,所述转动轴延伸出所述旋转底座的两端与螺母通过螺纹连接。
7.由上述任一方案优选地是,所述角度转向装置为转盘。
8.由上述任一方案优选地是,所述升降装置包括沿竖直方向伸缩的伸缩机构及驱动所述伸缩机构伸缩运动的伸缩机构驱动装置。
9.由上述任一方案优选地是,所述升降装置包括沿竖直方向伸缩的伸缩机构及驱动所述伸缩机构伸缩运动的伸缩机构驱动装置。
10.由上述任一方案优选地是,所述伸缩机构驱动装置包括由丝杠、滑块和电机,所述丝杠上设有所述滑块,所述丝杠通过联轴器与所述电机相连,所述滑块与交叉转动结构相连。
11.由上述任一方案优选地是,所述伸缩机构包括顶板、底板和多个交叉转动结构,通过相邻的所述交叉转动结构通过转轴实现首尾相连,每个所述交叉转动结构由两个连杆中间枢接组成,所述底板的上表面和所述顶板的下表面上均设有连接块和所述伸缩机构驱动装置,最末端的所述交叉转动结构的两个连杆的其中一个连杆与所述连接块通过连接轴转
动相连,另一个连杆与所述滑块相连,所述顶板的上表面与所述连接杆焊接。
12.本实用新型的有益效果为:
13.夹持机构通过左挡臂和右挡臂将望远镜夹持住,左挡臂上设有弹簧装置使左挡臂可以根据望远镜的尺寸更好地进行调整;
14.可以实现多角度可调整式的旋转;
15.升降装置通过设置伸缩机构,动态时可实现长跨度、自动化且稳定地升降;
16.采用本方案的望远镜支架进行观测,以代替传统手持望远镜在铁塔上的观测方式,观测较稳定,观测效率高。
附图说明
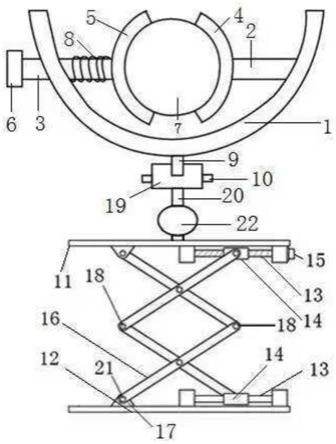
17.图1是本实用新型结构示意图;
18.图中:
19.1、架体;2、右挡臂;3、左挡臂;4、第二挡块;5、第一挡块;6、把手;
20.7、望远镜;8、弹簧;9、旋转块;10、转动轴;11、顶板;12、底板;13、丝杠;
21.14、滑块;15、电机;16、连杆;17、连接块;18、转轴;19、旋转底座;
22.20、连接杆;21、连接轴;22、转盘。
具体实施方式
23.下面通过具体的实施例对本实用新型的技术方案作进一步的说明。
24.实施例1
25.如图1所示一种用于宏基站勘察的望远镜支架,包括望远镜夹持装置、前后转向装置、角度转向装置和升降装置,所述望远镜夹持装置、所述转向装置、所述角度转向装置、所述升降装置从上至下依次设置,所述望远镜夹持装置与所述转向装置、所述角度转向装置、所述升降装置通过连接杆20相连,所述望远镜夹持装置包括架体1、左挡臂3和右挡臂2,左挡臂3的端部从架体1的侧壁上穿出,左挡臂3的端部设有第一挡块5,第一挡块5与架体1之间的左挡臂3上设有弹簧8,所述左挡臂的尾端设有把手6,右挡臂2的端部设有第二挡块4,右挡臂2的尾部与架体1相固定。
26.实施例2
27.如图1所示一种用于宏基站勘察的望远镜支架,包括望远镜夹持装置、前后转向装置、角度转向装置和升降装置,所述望远镜夹持装置、所述转向装置、所述角度转向装置、所述升降装置从上至下依次设置,所述望远镜夹持装置与所述转向装置、所述角度转向装置、所述升降装置通过连接杆20相连,所述望远镜夹持装置包括架体1、左挡臂 3和右挡臂2,左挡臂3的端部从架体1的侧壁上穿出,左挡臂3的端部设有第一挡块5,第一挡块5与架体1之间的左挡臂3上设有弹簧8,所述左挡臂的尾端设有把手6,右挡臂2的端部设有第二挡块4,右挡臂2的尾部与架体1相固定。
28.连接杆20上的从上至下依次设有前后旋转装置和角度转向装置。
29.实施例3
30.如图1所示一种用于宏基站勘察的望远镜支架,包括望远镜夹持装置、前后转向装置、角度转向装置和升降装置,所述望远镜夹持装置、所述转向装置、所述角度转向装置、所
述升降装置从上至下依次设置,所述望远镜夹持装置与所述转向装置、所述角度转向装置、所述升降装置通过连接杆20相连,所述望远镜夹持装置包括架体1、左挡臂 3和右挡臂2,左挡臂3的端部从架体1的侧壁上穿出,左挡臂3的端部设有第一挡块5,第一挡块5与架体1之间的左挡臂3上设有弹簧8,所述左挡臂的尾端设有把手6,右挡臂2的端部设有第二挡块4,右挡臂2的尾部与架体1相固定。
31.连接杆20上的从上至下依次设有前后旋转装置和角度转向装置。
32.所述前后旋转装置包括旋转底座19、旋转块9和转动轴10,旋转块9的一端穿设固定在转动轴10上,旋转块9的另一端与架体1的底部固定连接,转动轴10从旋转底座 19的底部穿设出,转动轴10延伸出旋转底座19的两端与螺母通过螺纹连接;所述角度转向装置为转盘22。
33.所述升降装置包括沿竖直方向伸缩的伸缩机构及驱动所述伸缩机构伸缩运动的伸缩机构驱动装置;所述升降装置包括沿竖直方向伸缩的伸缩机构及驱动所述伸缩机构伸缩运动的伸缩机构驱动装置。所述伸缩机构驱动装置包括由丝杠13、滑块14和电机15,丝杠13上设有滑块14,丝杠通13过联轴器与电机15相连,滑块14与交叉转动结构相连。所述伸缩机构包括顶板11、底板12和多个交叉转动结构,通过相邻的所述交叉转动结构通过转轴18实现首尾相连,每个所述交叉转动结构由两个连杆中间枢接组成,底板 12的上表面和顶板11的下表面上均设有连接块17和所述伸缩机构驱动装置,最末端的所述交叉转动结构的两个连杆16的其中一个连杆16与连接块17通过连接轴21转动相连,另一个连杆16与滑块14相连,顶板11的上表面与连接杆20焊接。
34.工作时:
35.拉动把手6使左挡臂3拉出,弹簧8压缩,将望远镜7放入第一挡块5和第二挡块4 之间,松开把手6此时弹簧8复位给左挡臂3一个推力,左挡臂3与右挡臂2夹持住望远镜7,拧开螺母转动架体1在转动轴10的带动下调节其前后的俯仰角度,调节好位置后将螺母拧紧固定转动轴10不转动,通过转盘22调节角度位置,通过所述升降装置调节好高度,然后进行勘察。
36.调节高度具体过程:电机15的起动和停止,以此控制升降装置的升降,电机15启动时,所述伸缩机构做伸出运动,此时高度降低;电机15反转时,所述伸缩机构做收缩运动,此时高度升高;电机15停止时,所述伸缩机构静止并保持结构的稳定性,调整好高度后,进行观测。
37.以上对本实用新型的三个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
