1.本发明涉及一种介质搬送装置及使用其的介质处理装置。
背景技术:
2.以往,作为此种介质搬送装置,已知有专利文献1至专利文献3中记载的装置。
3.在专利文献1中公开有一种图像形成装置,在一对辊上张紧架设具有弹性的二次转印带,利用调整元件对其中一辊相对于另一辊的倾斜角度进行调整,来调整纸张的搬送方向,由此能够调整图像平行度。
4.在专利文献2中公开有一种图像形成装置,包括图像平行度调整机构,所述图像平行度调整机构通过使弹性转印辊在轴向两端的咬入量存在差异而使弹性转印辊产生扭曲,从而调整图像在与记录材的搬送方向正交的宽度方向上的平行度。
5.在专利文献3中公开有一种图像形成装置,在二次转印搬送带产生带行走(belt walk)的情况下,以驱动辊的旋转轴为中心而使剥离辊的外侧端部摇动,由此对二次转印搬送带赋予由扭转所致的施加力,从而使二次转印搬送带向与带行走相反的一侧摇动。
6.[现有技术文献]
[0007]
[专利文献]
[0008]
[专利文献1]日本专利特开2006-267704号公报(用以实施发明的最优方式,图3)
[0009]
[专利文献2]日本专利特开2006-276294号公报(用以实施发明的最优方式,图1)
[0010]
[专利文献3]日本专利特开2007-11107号公报(用以实施发明的最优方式,图2)
技术实现要素:
[0011]
[发明所要解决的问题]
[0012]
本发明所欲解决的技术性问题在于,在利用搬送带搬送转移有图像的介质的形态中,兼顾转移至介质上的图像的平行度调整及介质的斜行调整。
[0013]
[解决问题的技术手段]
[0014]
技术方案1所述的发明是一种介质搬送装置,包括:搬送带,与保持有图像的图像保持元件相向设置,对介质进行搬送,且所述搬送带能够循环移动;第一张紧架设辊,张紧架设所述搬送带的一部分并与所述图像保持元件相向配置,在所述图像保持元件与所述搬送带之间夹持所述介质并加以搬送,且使被所述图像保持元件保持的图像转移至所述介质上;第二张紧架设辊,张紧架设所述搬送带中的自基于所述第一张紧架设辊的张紧架设部位至位于所述介质的搬送方向下游侧的部位;接触调整元件,以所述第一张紧架设辊的轴向其中一端为支点而使另一端摇动,从而调整所述图像保持元件与所述搬送带之间的接触区域的长边方向上的所述图像保持元件与所述搬送带的接触状态;及姿势调整元件,将所述第一张紧架设辊的中心与所述第二张紧架设辊的中心的距离保持为一定,以所述第二张紧架设辊的轴向其中一端为支点而使另一端摇动,从而调整所述第二张紧架设辊相对于所述第一张紧架设辊的姿势。
[0015]
技术方案2所述的发明是根据技术方案1所述的介质搬送装置,所述接触调整元件包括位移机构,所述位移机构使所述第一张紧架设辊的所述轴向另一端朝向相向的所述图像保持元件侧摇动。
[0016]
技术方案3所述的发明是根据技术方案2所述的介质搬送装置,所述位移机构经由偏心旋转构件而使保持构件直线性进退,所述保持构件将所述第一张紧架设辊的所述轴向另一端保持为能够旋转。
[0017]
技术方案4所述的发明是根据技术方案1所述的介质搬送装置,所述姿势调整元件包括:位置约束机构,设置于所述第一张紧架设辊与所述第二张紧架设辊的两端部,容许两者的旋转动作并将两者的轴间距离保持为一定;及位移机构,以所述第一张紧架设辊的所述轴向另一端为支点而使所述第二张紧架设辊的所述轴向另一端摇动。
[0018]
技术方案5所述的发明是根据技术方案4所述的介质搬送装置,所述位置约束机构包括:限制辊,设置于所述第一张紧架设辊的两端及所述第二张紧架设辊的两端,每个所述限制辊与所述第一张紧架设辊及所述第二张紧架设辊同轴地设置;间隔调整辊,介隔存在于所述限制辊间并接触配置;及保持框,每个所述保持框将两个所述限制辊及一个所述间隔调整辊保持为各轴心能够旋转,且将所述限制辊及所述间隔调整辊的轴心保持为在一直线上并列。
[0019]
技术方案6所述的发明是根据技术方案4所述的介质搬送装置,所述位移机构使所述第二张紧架设辊的轴向另一端在和连结所述第一张紧架设辊与所述第二张紧架设辊的轴中心的基准线大致正交的方向上进退。
[0020]
技术方案7所述的发明是根据技术方案1至6中任一项所述的介质搬送装置,
[0021]
在较所述搬送带更靠所述介质的搬送方向下游侧包括对所述介质进行除电的除电元件,所述除电元件追随所述第二张紧架设辊的摇动而移动。
[0022]
技术方案8所述的发明是根据技术方案1至6中任一项所述的介质搬送装置,在较所述搬送带更靠所述介质的搬送方向下游侧包括对所述介质进行引导的引导元件,所述引导元件追随所述第二张紧架设辊的摇动而移动。
[0023]
技术方案9所述的发明是根据技术方案1至6中任一项所述的介质搬送装置,所述第二张紧架设辊经由高电阻体而接地,对于所述高电阻体的连接部追随所述第二张紧架设辊的摇动而移动。
[0024]
技术方案10所述的发明是根据技术方案7至9中任一项所述的介质搬送装置,所述搬送带、第一张紧架设辊及第二张紧架设辊搭载于能够相对于固定框架摇动的摇动框架上,并在所述摇动框架上设置有所述除电元件、所述引导元件或对于所述高电阻体的连接部。
[0025]
技术方案11所述的发明是根据技术方案1所述的介质搬送装置,包括清扫元件,所述清扫元件在所述搬送带中的被所述第一张紧架设辊张紧架设的部位对所述搬送带进行清扫,所述清扫元件追随所述第一张紧架设辊的摇动而移动。
[0026]
技术方案12所述的发明是根据技术方案11所述的介质搬送装置,所述清扫元件的清扫框体以预先决定的支点为中心追随所述第一张紧架设辊的摇动而移动。
[0027]
技术方案13所述的发明是一种介质处理装置,包括:图像保持元件,对图像进行保持;根据技术方案1至12中任一项所述的介质搬送装置,与所述图像保持元件相向配置,将
被所述图像保持元件保持的图像转移并加以搬送。
[0028]
技术方案14所述的发明是根据技术方案13所述的介质处理装置,包括接离元件,所述接离元件使所述介质搬送装置相对于所述图像保持元件接触/分离。
[0029]
技术方案15所述的发明是根据技术方案13所述的介质处理装置,其特征在于,所述图像保持元件具有第二接触调整元件,所述第二接触调整元件以比通过所述介质搬送装置的所述接触调整元件的调整量粗的调整量对所述接触区域中的所述图像保持元件与所述搬送带的接触状态进行调整。
[0030]
技术方案16所述的发明是根据技术方案15所述的介质处理装置,所述介质搬送装置配置于较所述图像保持元件更靠下方处,并设置为能够相对于介质处理装置框体拉出。
[0031]
技术方案17所述的发明是根据技术方案15所述的介质处理装置,隔着所述接触区域相向的所述介质搬送装置侧的相向构成构件与所述图像保持元件侧的相向构成构件相比为低硬度。
[0032]
[发明的效果]
[0033]
根据技术方案1所述的发明,可在利用搬送带搬送转移有图像的介质的形态中,兼顾转移至介质上的图像的平行度调整及介质的斜行调整。
[0034]
根据技术方案2所述的发明,可容易实现接触调整元件。
[0035]
根据技术方案3所述的发明,可对图像保持元件与搬送带之间的接触状态进行阶段性微调整。
[0036]
根据技术方案4所述的发明,可容易实现姿势调整元件。
[0037]
根据技术方案5所述的发明,当构筑作为姿势调整元件的一要素的位置约束机构时,可容易兼顾第一张紧架设辊及第二张紧架设辊的一定的轴间距离以及两者的旋转动作性。
[0038]
根据技术方案6所述的发明,当构筑作为姿势调整元件的一要素的位移机构时,可保持各张紧架设辊的轴间距离,并且容易调整第二张紧架设辊的姿势。
[0039]
根据技术方案7所述的发明,即便第二张紧架设辊摇动,也可保持搬送带与除电元件的相对位置关系。
[0040]
根据技术方案8所述的发明,即便第二张紧架设辊摇动,也可保持搬送带与引导元件的相对位置关系。
[0041]
根据技术方案9所述的发明,即便第二张紧架设辊摇动,也可保持第二张紧架设辊与对于高电阻体的连接部的相对位置关系。
[0042]
根据技术方案10所述的发明,可容易提供如下结构:即便第二张紧架设辊摇动,也保持除电元件、引导元件或对于高电阻体的连接部与第二张紧架设辊的相对位置关系的结构。
[0043]
根据技术方案11所述的发明,即便第一张紧架设辊摇动,也可保持搬送带与清扫元件的相对位置关系。
[0044]
根据技术方案12所述的发明,可容易提供如下结构:即便第一张紧架设辊摇动,也保持搬动带与清扫元件的相对位置关系的结构。
[0045]
根据技术方案13所述的发明,可构筑包括介质搬送装置的介质处理装置,所述介质搬送装置能够在利用搬送带搬送转移有图像的介质的形态中,兼顾转移至介质上的图像
的平行度调整及介质的斜行调整。
[0046]
根据技术方案14所述的发明,可视需要而使图像保持元件与介质搬送装置接触/分离。
[0047]
根据技术方案15所述的发明,与不具有第二接触调整元件的形态相比,当使用种类不同的介质时,可大幅切换图像保持元件与介质搬送装置之间的接触区域的接触状态。
[0048]
根据技术方案16所述的发明,当对介质搬送装置与图像保持元件之间的接触区域的接触状态进行调整时,通过将位于较图像保持元件更靠下方的介质搬送装置拉出,可简单地实施基于接触调整元件的细致的调整作业。
[0049]
根据技术方案17所述的发明,当对介质搬送装置与图像保持元件之间的接触区域的接触状态进行调整时,相对于与图像保持元件相比硬度条件低的介质搬送装置,可实施基于接触调整元件的细致的调整作业。
附图说明
[0050]
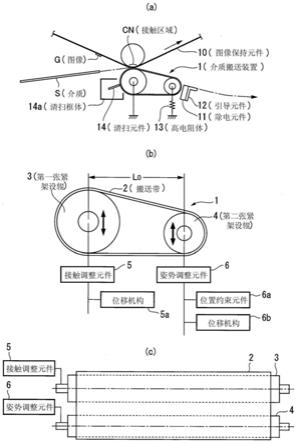
图1的(a)是表示应用本发明的包括介质搬送装置的介质处理装置的实施方式的概要的说明图,图1的(b)是表示图1的(a)所示的介质搬送装置的主要部分的说明图,图1的(c)是表示接触调整元件、姿势调整元件的设置例的说明图。
[0051]
图2是表示作为实施方式的介质处理装置的一例的图像形成装置的整体结构的说明图。
[0052]
图3是示意性表示实施方式的二次转印装置周围的结构要素的说明图。
[0053]
图4是表示实施方式的二次转印装置周围的结构的说明图。
[0054]
图5是表示实施方式中所使用的夹持压切换机构的详细内容的说明图。
[0055]
图6是表示实施方式中所使用的二次转印装置的带转印模块的结构例的立体说明图。
[0056]
图7是表示图6所示的带转印模块的摇动部件(parts)的立体说明图。
[0057]
图8是表示图6所示的带转印模块的固定部件的立体说明图。
[0058]
图9是表示图7所示的摇动部件中的转印带单元与清洁单元的关系的立体说明图。
[0059]
图10是表示图7所示的摇动部件中的转印带单元的结构例的说明图。
[0060]
图11的(a)是表示转印带单元的位置约束机构的一例的说明图,图11的(b)是示意性表示基于转印带单元的位置约束机构的约束状态的说明图,图11的(c)是表示作为转印带单元的第二张紧架设辊的剥离辊的行为的说明图。
[0061]
图12是表示实施方式中所使用的缩回(retract)机构的动作例(1)的说明图。
[0062]
图13是表示所述缩回机构的动作例(2)的说明图。
[0063]
图14是表示实施方式中所使用的夹持压调整机构及姿势调整机构的动作例(1)的说明图。
[0064]
图15是表示所述夹持压调整机构及姿势调整机构的动作例(2)的说明图。
[0065]
图16是表示实施方式的二次转印装置位于设置位置时的、转印带单元与周边零件的相对位置关系的说明图。
[0066]
图17是表示所述二次转印装置退避至缩回位置时的、转印带单元与周边零件的相对位置关系的说明图。
[0067]
图18是表示所述二次转印装置位于设置位置时的、转印带单元的周边零件的行为的说明图。
[0068]
图19是表示所述二次转印装置退避至缩回位置时的、转印带单元的周边零件的行为的说明图。
[0069]
图20的(a)是表示介质为压花纸(embossed paper)等特殊介质的条件下的二次转印区域的夹持压的选定状态的说明图,图20的(b)是表示介质为通常介质的条件下的二次转印区域的夹持压的切换状态的说明图。
[0070]
图21的(a)是示意性表示夹持压调整机构的动作例的说明图,图21的(b)是表示基于夹持压调整机构的夹持压的调整方法的说明图。
[0071]
图22的(a)是示意性表示转印带单元的结构例的说明图,图22的(b)是表示基于姿势调整机构的姿势调整时的行为的说明图,图22的(c)是表示比较方式1的二次转印装置中所使用的转印带单元的姿势调整时的行为的说明图,图22的(d)是表示基于比较方式1的姿势调整机构的姿势调整时的转印带的张紧架设状态的说明图。
[0072]
图23是表示比较方式2的二次转印区域中的夹持压调整机构的结构例的说明图。
[0073]
[符号的说明]
[0074]
1:介质搬送装置
[0075]
2:搬送带
[0076]
3:第一张紧架设辊
[0077]
4:第二张紧架设辊
[0078]
5:接触调整元件
[0079]
5a:位移机构
[0080]
6:姿势调整元件
[0081]
6a:位置约束机构
[0082]
6b:位移机构
[0083]
10:图像保持元件
[0084]
11:除电元件
[0085]
12:引导元件
[0086]
13:高电阻体
[0087]
14:清扫元件
[0088]
14a:清扫框体
[0089]
s:介质
[0090]
g:图像
[0091]
cn:接触区域
[0092]
l
o
:轴间距离
具体实施方式
[0093]
实施方式的概要
[0094]
图1的(a)是表示应用本发明的介质处理装置的实施方式的概要的说明图。
[0095]
在所述图中,介质处理装置包括:图像保持元件10,对图像g进行保持;及介质搬送
装置1,与图像保持元件10相向配置,将被图像保持元件10保持的图像g转移至介质s上并对介质s加以搬送。
[0096]
此处,如图1的(a)~图1的(c)所示,介质搬送装置1包括:搬送带2,与保持有图像g的图像保持元件10相向设置,对介质s进行搬送,且所述搬送带2具有弹性并能够循环移动;第一张紧架设辊3,张紧架设搬送带2的一部分并与图像保持元件10相向配置,在图像保持元件10与搬送带2之间夹持介质s并加以搬送,且使被图像保持元件10保持的图像转移至介质s上;第二张紧架设辊4,张紧架设搬送带2中的自基于第一张紧架设辊3的张紧架设部位至位于介质s的搬送方向下游侧的部位;接触调整元件5,以第一张紧架设辊3的轴向其中一端为支点而使另一端摇动,从而调整图像保持元件10与搬送带2之间的接触区域cn的沿着长边方向的接触状态;及姿势调整元件6,将第一张紧架设辊3与第二张紧架设辊4的轴间距离l
o
保持为一定,以第二张紧架设辊4的轴向其中一端为支点而使另一端摇动,从而调整第二张紧架设辊4相对于第一张紧架设辊3的姿势。
[0097]
在此种技术性手段中,介质搬送装置1广泛包括将被图像保持元件10保持的图像g转移至介质s上并对介质s加以搬送的装置。
[0098]
而且,关于图像g的转移方式,并不限于静电转印而广泛包括与介质接触来转移的方式。另外,图像保持元件10若为对转移至介质s之前的图像进行保持的元件,则并不限于感光体、介电体、中间转印体而广泛包括。
[0099]
进而,就追随由接触调整元件5或姿势调整元件6引起的张紧架设辊3、4的摇动而变形的方面而言,搬送带2主要优选为具有弹性的带构件,但也包括如下形态:搬送带2不具有弹性而使第一张紧架设辊3、第二张紧架设辊4具备弹性。
[0100]
进而,搬送带2并不限于仅利用第一张紧架设辊3、第二张紧架设辊4进行张紧架设的形态,也包括使用其他的张紧架设辊的形态。
[0101]
另外,第一张紧架设辊3大多用作通常驱动辊,但并不限于此,也可将另一张紧架设辊作为驱动辊。
[0102]
另外,第一张紧架设辊3除在与图像保持元件10之间夹持介质s并加以搬送以外,还需要具备使被图像保持元件10保持的图像g转移的功能(例如,转印电场形成用的电极功能)。
[0103]
进而,就容易自搬送带2剥离介质s的观点而言,第二张紧架设辊4优选为使用直径小于第一张紧架设辊3的辊。
[0104]
另外,接触调整元件5对图像保持元件10与搬动带2之间的接触区域cn的沿着长边方向的接触状态、具体而言为搬送带2的咬入量进行调整,例如,可设为大致均等地调整为在接触区域cn中的接触压力不产生偏差。
[0105]
进而,姿势调整元件6能够在有效利用了基于接触调整元件5的调整的状态下对搬送带的斜行进行调整。
[0106]
其次,对本实施方式的介质搬送装置的具代表性的形态或优选形态进行说明。
[0107]
首先,作为接触调整元件5的具代表性的形态,可列举如下形态:如图1的(b)所示,包括使第一张紧架设辊3的轴向另一端朝向相向的图像保持元件10侧摇动的位移机构5a。
[0108]
在本例中,作为接触调整元件5的优选形态,可列举如下形态:位移机构5a经由偏心旋转构件而使保持构件直线性进退,所述保持构件将第一张紧架设辊3的轴向另一端保
持为能够旋转。本例为使用偏心旋转构件(凸轮构件)作为位移机构5a的形态,通过使偏心旋转构件的偏心量连续或阶段性变化而能够使第一张紧架设辊3的轴向另一端的位置连续或阶段性位移。
[0109]
另外,作为姿势调整元件6的具代表性的形态,可列举如下形态:包括位置约束机构6a及位移机构6b,所述位置约束机构6a设置于第一张紧架设辊3与第二张紧架设辊4的两端部,容许两者的旋转动作并将两者的轴间距离l
o
保持为一定,所述位移机构6b以第一张紧架设辊3的轴向另一端为支点而使第二张紧架设辊4的轴向另一端摇动。
[0110]
此处,作为姿势调整元件6的优选形态,可列举包括如下形态:每个位置约束机构6a具有两个限制辊,合计4个限制辊设置于第一张紧架设辊3的两端及第二张紧架设辊4的两端,与该些张紧架设辊同轴地设置;间隔调整辊合计有两个,每个间隔调整辊介隔存在于两个限制辊间并接触配置;及保持框合计有两个,每个保持框将两个限制辊及一个间隔调整辊保持为各轴心能够旋转,此时,将所述3个辊的轴心保持为在一直线上并列;或者位移机构6b使第二张紧架设辊4的轴向另一端在和连结第一张紧架设辊3与第二张紧架设辊4的轴中心的基准线大致正交的方向上进退的形态。
[0111]
另外,在介质搬送装置1包括周边零件的情况下,优选为保持与周边零件的相对位置关系。
[0112]
例如,作为包括除电元件11时的优选形态,可设为:在较搬送带2更靠介质s的搬送方向下游侧包括对介质s进行除静电的除电元件11,除电元件11追随第二张紧架设辊4的摇动而移动。本例为使除电元件11追随第二张紧架设辊4的摇动而移动的形态。
[0113]
另外,作为包括引导元件12时的优选形态,可设为:在较搬送带2更靠介质s的搬送方向下游侧包括对介质s进行引导的引导元件12,引导元件12追随第二张紧架设辊4的摇动而移动。本例为使引导元件12追随第二张紧架设辊4的摇动而移动的形态。
[0114]
进而,作为采用高电阻体接地方式时的优选形态,可设为:第二张紧架设辊4经由高电阻体13而接地,对于高电阻体13的连接部追随第二张紧架设辊4的摇动而移动。本例为使对于高电阻体13的连接部追随第二张紧架设辊4的摇动而移动的形态。
[0115]
此处,作为采用除电元件11、引导元件12及高电阻体接地方式时的结构例,可列举如下形态:搬送带2、第一张紧架设辊3及第二张紧架设辊4搭载于能够相对于未图示的固定框架摇动的未图示的摇动框架上,并在摇动框架上设置有除电元件11、引导元件12或对于高电阻体13的连接部。
[0116]
另外,作为包括清扫元件14时的优选形态,可设为:包括在搬送带2中的被第一张紧架设辊3张紧架设的部位对搬送带2进行清扫的清扫元件14,清扫元件14追随第一张紧架设辊3的摇动而移动。本例中,可列举如下形态:清扫元件14的清扫框体14a以预先决定的支点为中心追随第一张紧架设辊3的摇动而移动。
[0117]
进而,作为介质处理装置的优选形态,可列举包括使介质搬送装置1相对于图像保持元件10接触/分离的接离元件(图1的(a)~图1的(c)中未图示)的形态。接离元件例如当在图像保持元件10与介质搬送装置1之间产生介质堵塞(阻塞)时,使两者分离而能够对阻塞进行处理。
[0118]
另外,作为介质处理装置的另一优选形态,可列举如下形态:图像保持元件10具有第二接触调整元件(图1的(a)~图1的(c)中未图示),所述第二接触调整元件以粗于基于介
[0132]
另外,中间转印体30架设于多个(本实施方式中为三个)张紧架设辊31~张紧架设辊33,例如张紧架设辊31用作由驱动源(未图示)驱动的驱动辊,并利用所述驱动辊进行循环移动。进而,在张紧架设辊31、33间设置有用以将二次转印后的中间转印体30上的残留色粉去除的中间转印体清扫装置35。
[0133]
在本例中,作为中间转印体30,可适当选定,例如使用聚酰亚胺、聚酰胺酰亚胺等合成树脂制的带材,作为张紧架设辊31~张紧架设辊33,使用氨基甲酸酯橡胶等弹性材料。
[0134]
再者,如图2所示,中间转印体30及张紧架设辊31~张紧架设辊33被中间转印框架保持,并作为中间转印模块而一体化。
[0135]-二次转印装置(统一转印装置)-[0136]
进而,二次转印装置(统一转印装置)50也作为介质搬送装置发挥功能,如图2及图3所示,配置为使在多个(例如两个)张紧架设辊52、53上张紧架设有转印搬送带54的转印带单元51与中间转印体30的表面接触。特别是,本例中,转印带单元51被后述的缩回机构110(参照图6、图7)支撑为能够退避,且能够相对于中间转印体30接触/分离。
[0137]
此处,转印搬送带54为使用氨基甲酸酯橡胶等弹性材料的体积电阻8.5logω~10.0logω的半导电性的弹性带,将第一张紧架设辊52构成为转印辊55,将所述转印辊55介隔转印搬送带54而与中间转印体30在二次转印区域(统一转印区域)tr压接配置,并且将中间转印体30的张紧架设辊33用作构成转印辊的相向电极的相向辊56,自第一张紧架设辊52位置朝向第二张紧架设辊53位置形成介质s的搬送路径,并使第二张紧架设辊53作为剥离辊发挥功能。
[0138]
另外,本例中,第一张紧架设辊52(用作转印辊55)为在金属制轴的周围被覆弹性层而成的结构,所述弹性层是在发泡氨基甲酸酯橡胶等发泡原材料中调配碳黑等而成,另一方面,第二张紧架设辊53例如包括金属制辊。而且,本例中,转印带单元51的第一张紧架设辊52直接接地,第二张紧架设辊53经由高电阻体58(例如,500mω左右)而接地,从而防止对于转印搬送带54的带电。
[0139]
特别是,本例中,作为隔着二次转印区域tr的相向构成构件,选定转印搬送带54的硬度低于中间转印体30,且第一张紧架设辊52(转印辊55)的硬度低于相向辊56(张紧架设辊33)的构件。因此,本例中,隔着二次转印区域tr的转印带单元51侧的相向构成构件(本例中为转印搬送带54 第一张紧架设辊52)的硬度低于中间转印模块侧的相向构成构件(本例中为中间转印体30 相向辊56)。
[0140]
再者,本例中,第一张紧架设辊52、第二张紧架设辊53使用相同程度的直径尺寸的辊,若考虑到转印搬送带54的下游端处的介质s的剥离性,则可设为:使第二张紧架设辊53作为直径小于第一张紧架设辊52的剥离辊发挥功能。
[0141]
进而,针对相向辊56(本例中兼用张紧架设辊33),经由导电性的供电辊57而施加来自转印电源60的转印电压v
tr
,从而在转印辊55及相向辊56间形成规定的转印电场。
[0142]-定影装置-[0143]
如图2所示,定影装置70具有:加热定影辊71,接触地配置于介质的图像保持面侧,且所述加热定影辊71能够驱动旋转;及加压定影辊72,与所述加热定影辊71相向地压接配置,并追随加热定影辊71而旋转,并且使保持于介质s上的图像在两定影辊71、72间的转印区域通过,对所述图像进行加热加压定影。
[0144]-介质搬送系统-[0145]
进而,如图2及图3所示,介质搬送系统80具有多阶段(本例中为两阶段)介质供给容器81、82,使自介质供给容器81、82的任一者供给的介质s自在大致铅垂方向上延伸的铅垂搬送路83经过在大致水平方向上延伸的水平搬送路84而到达至二次转印区域tr,其后,使保持有经转印的图像的介质s经由搬送带85而到达至基于定影装置70的定影部位,并排出至设置于装置框体21的侧方的介质排出接受部86。
[0146]
而且,介质搬送系统80具有自水平搬送路84中的位于定影装置70的介质搬送方向下游侧的部分朝向下方分支的能够反转的分支搬送路87,使经所述分支搬送路87反转的介质s返回,并经过搬送路88而再次自铅垂搬送路83返回至水平搬送路84,在二次转印区域tr将图像转印至介质s的背面,并经过定影装置70而排出至介质排出接受部86。
[0147]
另外,在介质搬送系统80中除设置有对介质s的位置进行匹配而向二次转印区域tr供给的位置匹配辊90以外,还在各搬送路83、84、87、88中设置有适当数量的搬送辊91。
[0148]
进而,在装置框体21的与介质排出接受部86相反的一侧设置有能够朝向水平搬送路84供给手动介质的手动介质供给器95。
[0149]-转印带单元周围的结构例-[0150]
<带转印模块>
[0151]
在本例中,在转印带单元51中,如图6、图7及图9所示,在转印搬送带54中的与第一张紧架设辊52(转印辊55)对应的位置设置有清扫单元170。
[0152]
本例中,转印带单元51及清扫单元170作为能够相对于固定部件202摇动的摇动部件201发挥功能,且将摇动部件201及固定部件202这两者包含在内而称为带转印模块200。
[0153]
而且,本例中,带转印模块200以能够相对于装置框体21自前侧拉出的方式搭载,例如,在维护时,自装置框体21拉出而进行维护等。
[0154]
此处,图6中示出带转印模块200的整体结构,图7中示出摇动部件201,图8中示出固定部件202的外观。
[0155]
<摇动部件>
[0156]
在本例中,如图7、图9及图10所示,作为摇动部件201的转印带单元51具有将转印搬送带54等要素零件一体地保持的带单元框体510,所述带单元框体510被支撑为能够相对于固定部件202摇动。
[0157]
具体而言,将第一张紧架设辊52用作驱动辊,将第二张紧架设辊53用作从动辊。而且,第二张紧架设辊53被支撑为能够以第一张紧架设辊52的旋转轴52a为摇动支点而摇动。
[0158]
另外,如图7、图9及图10以及图16至图19所示,作为摇动部件201的清扫单元170具有收容转印搬送带54上的残留物的清扫单元框体171,在清扫单元框体171中介隔支撑托架(bracket)172而设置有清扫刮板173,清扫刮板173的前端部沿着与转印搬送带54的移动方向交叉的方向的宽度方向接触地配置。
[0159]
此处,图16、图17表示在带转印模块200的宽度方向近前侧切断清扫单元170的剖面,图16表示基于缩回机构110的缩回时,另外,图17表示基于缩回机构110的缩回解除时(接触时)。进而,图18、图19表示在宽度方向的大致中央部分切断带转印模块200的剖面,图18表示基于缩回机构110的缩回时,另外,图19表示基于缩回机构110的缩回解除时(接触时)。
[0160]
进而,清扫单元框体171被支撑为能够相对于固定部件202的固定框体210以固定轴175为摇动支点而摇动,所述固定轴175以与转印带单元51的第一张紧架设辊52的轴向平行地延伸的方式被固定,另外,清扫单元框体171的一部分被保持为能够相对于转印带单元51的第一张紧架设辊52的旋转轴52a的两端旋转。
[0161]
进而,在清扫单元框体171的支撑托架172与固定部件202的固定框体210之间设置有施力弹簧176,通过施力弹簧176的施加力而使清扫刮板173保持与转印搬送带54的接触状态。
[0162]
另外,符号177是设置于清扫单元框体171的长边方向大致中央处,且具有供固定轴175贯穿的贯穿孔并对固定轴175进行支撑的支撑固定器。因此,如图9所示,清扫单元框体171经转印带单元51的第一张紧架设辊52的旋转轴52a的两端位置、和支撑固定器177与固定轴175的接触部这三点位置约束。
[0163]
另外,作为搭载于摇动部件201的周边零件,有以下零件。
[0164]
关于摇动部件201,如图6及图7所示,在转印带单元51的转印搬送带54的搬送方向下游侧设置有作为除电元件的除电构件(例如,除电针)180或作为对介质进行引导搬送的引导元件的板状引导滑槽185,除电元件180、引导滑槽185一体地安装于转印带单元51的带单元框体510(参照图10)。
[0165]
另外,本例中,如图6及图14所示,第二张紧架设辊53被支撑为能够相对于带单元框体510旋转,由于采用了经由高电阻体58的接地方式,因此在带单元框体510设置有包含金属制板材的接点190作为与高电阻体58的连接部,在所述接点190接触地配置有第二张紧架设辊53的旋转轴53a。
[0166]
<固定部件>
[0167]
另外,如图6及图8所示,固定部件202具有固定框体210,所述固定框体210确保有能够搭载摇动部件201的收容接受部211,进而,为了使清扫单元170能够以预先决定的摇动支点为中心而摇动,在搭载有清扫单元170的区域以架桥跨越固定框体210的两侧壁的方式设置有固定轴175。
[0168]
另外,在固定框体210的两侧壁上部设置有通过插入中间转印框架34的定位孔(未图示)而将中间转印框架34定位的多个定位销214。
[0169]-设置于二次转印装置周围的各种机构-[0170]
在本实施方式中,如图3所示,在二次转印装置50周围设置有:缩回机构110,使二次转印装置50自二次转印区域tr缩回;夹持压切换机构120,根据介质s的种类来切换二次转印区域tr的夹持压(接触压)np;夹持压调整机构130,对二次转印区域tr的夹持压np进行微调整;及姿势调整机构150,对转印带单元51的姿势进行调整。
[0171]
另外,符号101为对介质s的种类进行判别的介质判别器,且有以判别用户所指定的介质的方式进行、或者利用未图示的检测器对收容于介质供给容器81、82的介质或搬送中的介质进行检测,并基于所得检测信号来判别介质s的种类的判别器。
[0172]
进而,控制装置100接收来自介质判别器101的判别信号,并向例如夹持压切换机构120发送控制信号。
[0173]
另外,控制装置100在检测到二次转印区域tr处的介质堵塞(阻塞)的情况下发送控制信号,以便能够进行基于缩回机构110的缩回动作。
[0174]
再者,本例中,关于夹持压调整机构130及姿势调整机构150,如后所述,用户手动或使用夹具来进行调整,因此不进行基于控制装置100的控制。
[0175]-缩回机构-[0176]
在本例中,如图6至图8所示,缩回机构110分别设置于带转印模块200的固定部件202的固定框体210的两侧壁外侧。
[0177]
在本例中,缩回机构110将具有分别在三方向上延伸的臂部112~臂部114的连杆臂(link arm)111支撑为能够以清扫单元170的固定轴175为摇动支点oa而摇动,通过将施力弹簧115钩挂于连杆臂111的三个臂部112~臂部114中的、自固定框体210的外侧观察时向下方侧延伸的第一臂部112,来对连杆臂111向逆时针方向(或顺时针方向)施力。而且,在朝向与施力弹簧115的施力方向相反的方向延伸的第二臂部113设置有包含例如旋转滚轴的凸轮从动件(cam follower)117,作为旋转偏心构件的缩回凸轮116的凸轮面116a被按抵于所述凸轮从动件117的下侧,进而,在连杆臂111中的向与缩回凸轮116隔着摇动支点oa相反的一侧延伸的第三臂部114,转印带单元51的第一张紧架设辊52(转印辊55)的旋转轴52a被支撑为能够旋转。
[0178]
再者,在本例中,缩回凸轮116的凸轮轴116b延伸至带转印模块200的后侧,在凸轮轴116b的后侧设置有后侧的缩回凸轮116,并且设置有作为驱动传递机构的一例的缩回齿轮118(参照图12),来自驱动源(未图示)的驱动力被传递至所述缩回齿轮118。
[0179]
如上所述,本例中,缩回机构110将转印带单元51的第一张紧架设辊52的旋转轴52a的两端支撑为能够缩回。
[0180]-夹持压切换机构-[0181]
本实施方式中,如图4及图5所示,夹持压切换机构120使二次转印装置50的相向辊56(相当于张紧架设辊33)的旋转轴56a位置位移。
[0182]
特别是,本例中,夹持压切换机构120作为与后述的夹持压调整机构130相比更粗调整二次转印区域tr的夹持压(接触压)np的第二夹持压调整机构(相当于第二接触调整元件)发挥功能。
[0183]
在本例中,以覆盖相向辊56的轴向两端及上方的方式设置有辊固定器560,相向辊56的旋转轴56a的两端经由轴承构件561而被辊固定器560的轴向两侧壁支撑为能够旋转,另外,轴承构件561被辊固定器560保持为能够相对于转印带单元51接触/分离。而且,在辊固定器560与轴承构件561之间设置有施力弹簧562,所述施力弹簧562对相向辊56向转印带单元51侧施力。
[0184]
在本例中,夹持压切换机构120将作为偏心旋转构件的切换凸轮121分别支撑于与相向辊56的旋转轴56a的两端同轴的位置,各切换凸轮121具有形成为切换凸轮121的外径沿着切换凸轮121的周向变化的凸轮面122。本例中,凸轮面122具有小径部122a与形成于相对于小径部122a在切换凸轮121的周向错开180度的位置的大径部122b,自小径部122a至大径部122b圆滑地相连。
[0185]
另外,来自驱动源(未图示)的驱动力经由驱动传递机构124而传递至各切换凸轮121,各切换凸轮121以规定量同步旋转。
[0186]
本例中,驱动源(未图示)设置于装置框体21的后侧(里侧),另外,驱动传递机构124设为:在辊固定器560的两侧壁将自后侧(里侧)朝向前侧(近前侧)延伸的传递轴125支
撑为能够旋转,在所述传递轴125的后侧(里侧)固定被驱动齿轮126,在所述传递轴125的前侧(近前侧)经由传递齿轮列127(本例中,使用三个传递齿轮)而使前侧(近前侧)的切换凸轮121旋转驱动。此处所述的传递齿轮列127具有与传递轴125同轴设置的传递齿轮127a、与切换凸轮121同轴设置的最终段的传递齿轮127c、及介隔存在于传递齿轮127a、127c间的中间传递齿轮127b。再者,作为驱动传递机构124,可设为将来自被驱动齿轮126的驱动力经由未图示的传递齿轮列而传递至设置于后侧(里侧)的切换凸轮121。
[0187]-夹持压调整机构-[0188]
在本例中,如图4至图6以及图14、图15所示,夹持压调整机构130分别设置于带转印模块200的前侧及后侧这两处。
[0189]
此处,对设置于带转印模块200的前侧的夹持压调整机构130进行说明,后侧的夹持压调整机构130与前侧的夹持压调整机构相同,因此省略其说明。
[0190]
在本例中,关于夹持压调整机构130,如图4、图6、图7、图14及图15所示,与转印带单元51的第一张紧架设辊52(转印辊55)的旋转轴52a的前侧的端部同轴地设置有微调整凸轮131,本例中,以显露于缩回机构110的连杆臂111的外侧面的方式配置。
[0191]
再者,图14及图15表示通过缩回机构110而将带转印模块200的摇动部件201配置于自中间转印体30缩回的位置的状态。
[0192]
在本例中,微调整凸轮131具有沿着微调整凸轮131的周向而微调整凸轮131的外径自最小径部向最大径部逐渐地变化的凸轮面132,所述凸轮面132与夹持压切换机构120的切换凸轮121的凸轮面122接触地配置。
[0193]
另外,在前侧微调整凸轮131的近前侧及后侧微调整凸轮131的里侧设置有角度位置限制用的位置限制环133。在本例中,位置限制环133沿着圆环状的环本体134的周向空开预先决定的间隔而形成有多个凹部135。此处,凹部135的数量可适当选定,例如,若凹部135为12个,则可将凹部135以30
°
的角度间隔形成。另外,各微调整凸轮131的外径的变化量可适当选定,可设为随着向周向前进凹部135的1个量而外径以外径变化量δd(例如50μm至100μm)为单位变大。
[0194]
另外,本例中,在缩回机构110的连杆臂111的外侧面中的位置限制环133的下方设置有作为停止元件的塞杆(stopper rod)136。塞杆136在前端部具有半球状的凸部136a,另外,以朝向位置限制环133的凹部135按压凸部136a的方式被按压弹簧137按压。在本例中,半球状的凸部136a以堵塞凹部135的入口部分的方式被按压,例如,当用户手动或使用夹具来使位置限制环133适当旋转时,随着位置限制环133的凹部135的移动,塞杆136在受到按压弹簧137的按压的状态下反复进行出没动作,从而能够使位置限制环133每隔凹部135的间隔具有格格的点击感地旋转。
[0195]
即,通过使位置限制环133移动规定角度、换言之为规定数量的凹部135的数量n,能够对作为微调整凸轮131的凸轮面132的外径变化量的n
×
δd进行微调整。
[0196]
再者,关于设置于后侧的夹持压调整机构130,也与前侧的夹持压调整机构大致同样地构成。
[0197]-姿势调整机构-[0198]
在本例中,如图4至图6、图10、图11的(a)~图11的(c)及图14、图15所示,姿势调整机构150设置为能够在带转印模块200的前侧进行调整。
[0199]
即,姿势调整机构150包括:位置约束机构151,设置于转印带单元51的第一张紧架设辊52与第二张紧架设辊53的两端部,容许两者的旋转动作并将两者的轴间距离保持为一定;及位移机构160,以第一张紧架设辊52的轴向另一端(本例中为旋转轴52a的前侧的端部)为支点而使第二张紧架设辊53的轴向另一端(前侧旋转轴53a)摇动。
[0200]
此处,如图9至图11的(a)所示,位置约束机构151包括:限制辊152、153,同轴地设置于第一张紧架设辊52及第二张紧架设辊53的两端;间隔调整辊154,介隔存在于限制辊152、153间并接触配置;及保持框155,将限制辊152、153及间隔调整辊154以各轴心呈直线状配置的方式保持为能够旋转。
[0201]
此时,如图11的(a)、图11的(b)所示,第一张紧架设辊52及第二张紧架设辊53的轴间距离在前侧(近前侧)、后侧(里侧)均为一定的尺寸lc。
[0202]
另外,如图6、图8、图14及图15所示,位移机构160设置于第二张紧架设辊53的旋转轴方向的前侧(近前侧)。
[0203]
本例中,位移机构160设置于带转印模块200的固定部件202的固定框体210的近前侧侧壁的外侧,并构成为使第二张紧架设辊53的轴向另一端在和连结第一张紧架设辊52与第二张紧架设辊53的轴中心的基准线s大致正交的方向w上进退。
[0204]
具体而言,如图14所示,位移机构160具有沿着与基准线s大致正交的方向w延伸的长条的位移调整板161。在所述位移调整板161,第二张紧架设辊53的旋转轴53a被支撑为能够旋转,在位移调整板161的上下两端部形成有大致u状或倒u字状的引导槽162、163。另一方面,在固定框体210的侧壁外侧,引导突起164、165与引导槽162、163相对应地突出形成,并卡合配置为能够沿着引导槽162、163滑动。
[0205]
另外,在位移调整板161的长边方向上形成有多个(本例中为两个)固定孔166。所述固定孔166沿着位移调整板161的移动方向呈长孔状形成,在固定孔166中插入螺钉等固定件167,从而固定于固定框体210。因此,若紧固固定件167,则固定件167的头与位移调整板161接触,将位移调整板161以无法移动的状态固定,若拧松固定件167,则位移调整板161成为能够沿着引导槽162、163移动的状态。
[0206]
进而,在位移调整板161中的下侧的引导槽163的上方形成有凸轮从动件孔168,所述凸轮从动件孔168呈在与位移调整板161的长边方向交叉的短边方向上延伸的长孔状形成,在所述凸轮从动件孔168内收容有位移调整凸轮169。所述位移调整凸轮169构成为相对于旋转轴169a而具有大致椭圆状的外形的偏心凸轮。所述位移调整凸轮169在解除了基于固定件167的固定状态的状态下,通过使用者手动或使用夹具来使旋转轴169a旋转而旋转,从而使凸轮从动件孔168向上方或下方移动。
[0207]
因此,本例中,位移调整板161在w方向上适当移动,因此如图11的(c)所示,被所述位移调整板161保持的第二张紧架设辊53的前侧的旋转轴53a的位置在w方向上向上方(u)或下方(d)位移。
[0208]
再者,图15中表示位移调整板161相对于图14所示的基准位置如箭头所示般向下方侧移动的状态。
[0209]
其次,对本实施方式的图像形成装置的运行进行说明。
[0210]-基于缩回机构的缩回动作-[0211]
在本实施方式中,缩回机构110设置于带转印模块200的两侧,分别同步运行。此
时,在使带转印模块200缩回的情况下,如图12及图13所示,可使缩回凸轮116在预先决定的方向上旋转,当在缩回凸轮116的凸轮面的外径增加的方向上旋转,并到达相当于缩回位置的最大外径时,连杆臂111的第二臂部113被向上方按压,伴随于此,第三臂部114向下方侧移动,转印带单元51的第一张紧架设辊52(转印辊55)的轴承部的位置自二次转印区域tr退避而到达预先决定的缩回位置(参照图12)。
[0212]
另外,在解除基于缩回机构110的缩回动作的情况下,当将缩回凸轮116的凸轮面116a的外径旋转至最小位置时,连杆臂111被施力弹簧115的施加力施力,第二臂部113向下方侧移动,伴随于此,转印带单元51的第一张紧架设辊52(转印辊55)的轴承部的位置到达与二次转印区域tr接触的接触位置(contact position)(参照图13)。
[0213]-基于夹持压切换机构的夹持压的切换-[0214]
在本实施方式中,所使用的介质s的种类很多,例如在使用如压花纸般表面具有粗凹凸的的介质sa的情况下,如图20的(a)所示,例如使用与普通纸之类的介质sb相同的二次转印条件(夹持压)时,有图像部难以转印至介质sa的表面所具有的凹部300的担忧。
[0215]
因此,本实施方式中,在使用压花纸之类的表面粗糙的介质sa的情况下,控制装置100基于来自介质判别器101的判别信号来识别介质sa,并将规定的控制信号发送至夹持压切换机构120。
[0216]
如此,夹持压切换机构120使切换凸轮121适当旋转,例如可设为使作为切换凸轮121的凸轮面122的小径部122a与夹持压调整机构130的微调整凸轮131的凸轮面132接触。
[0217]
在所述状态下,转印带单元51的第一张紧架设辊52(转印辊55)与相向辊56之间的夹持压np1变高,获得适于介质sa的二次转印条件。其结果,在介质sa的凹部300也二次转印有图像,从而能够将图像品质保持得良好。
[0218]
另一方面,在使用普通纸之类的介质sb的情况下,如图20的(b)所示,可设为通过控制装置100而使作为切换凸轮121的凸轮面122的大径部122b与夹持压调整机构130的微调整凸轮131的凸轮面132接触。
[0219]
在所述状态下,转印带单元51的第一张紧架设辊52(转印辊55)与相向辊56之间的夹持压np2设定得低,获得适于介质sb的二次转印条件。
[0220]-基于夹持压调整机构的微调整-[0221]
其次,对基于夹持压调整机构130的夹持压的微调整进行说明。
[0222]
在本例中,如图21的(a)所示,位于前侧的夹持压调整机构130可对转印带单元51的第一张紧架设辊52的旋转轴52a的前侧的位置进行微调整。
[0223]
此时,关于第一张紧架设辊52,由于以旋转轴52a的后侧的端部为支点而使旋转轴52a的前侧的端部摇动,因此如图21的(b)所示,例如在如二次转印区域tr处的夹持压由点线所示般,前侧与后侧相比变得过高,或者如由两点划线所示般,前侧与后侧相比变低的情况下,通过使第一张紧架设辊52的旋转轴52a的前侧的端部适当位移,能够将二次转印区域tr的夹持压调整为如由实线所示般大致均匀。
[0224]
再者,位于后侧的夹持压调整机构130与前侧大致同样地发挥作用,关于第一张紧架设辊52,可以旋转轴52a的前侧的端部为支点而使旋转轴52a的后侧的端部摇动,从而对转印带单元51的第一张紧架设辊52的旋转轴52a的后侧的位置进行微调整。
[0225]
特别是,本实施方式中,不仅转印带单元51的第一张紧架设辊52(作为转印辊55发
挥功能)由弹性材料构成,而且转印搬送带54也由弹性材料构成,因此与中间转印体30及相向辊56相比成为低硬度,相应地,在二次转印区域tr与中间转印体30及相向辊56相向的转印带单元51相对于夹持压np的变形量变大。因此,本例中,通过在转印带单元51侧附加夹持压调整机构130来对夹持压np进行微调整。
[0226]-基于姿势调整机构的姿势调整-[0227]
本实施方式中,关于姿势调整机构150,如图22的(a)、图22的(b)所示,转印带单元51的第一张紧架设辊52与第二张紧架设辊53之间的轴间距离在轴向两端均维持一定的尺寸lc,在所述状态下,使第二张紧架设辊53的前侧的旋转轴53a位置位移来调整第二张紧架设辊53的姿势。
[0228]
此时,转印搬送带54的宽度方向两端的速度为一定,另外,通过对第二张紧架设辊53的姿势进行调整而能够调整转印搬送带54的行走。
[0229]
比较方式1
[0230]
在所述方面,图22的(c)所示的比较方式1的姿势调整机构150'中,成为不使用实施方式的位置约束机构151且仅使用例如位移机构160的形态,因此如图22的(c)、图22的(d)所示,尝试对转印带单元51'的转印搬送带54'进行研究时,即便第一张紧架设辊52'与第二张紧架设辊53'之间的轴间距离在后侧为尺寸lc,但由于前侧为尺寸lc'(≠lc),因此转印搬送带54'的宽度方向两端部的周速度也成为v1≠v2而不同。因此,有转印搬送带51'容易蛇行的担忧。
[0231]-二次转印装置与周边零件的位置关系-[0232]
本实施方式中,如图6及图7所示,在转印带单元51的转印搬送带54的搬送方向下游侧设置有除电构件(例如,除电针)180或作为对介质进行引导搬送的引导元件的板状的引导滑槽185,即便转印带单元51的位置发生变化,除电构件180或引导滑槽185与转印带单元51的相对关系也不会改变,因此基于除电构件的除电作用以及基于引导滑槽185的介质的引导性能保持得良好。
[0233]
另外,第二张紧架设辊53与作为和高电阻体58的连接部的接点190接触地配置,即便转印带单元51的位置发生变化,第二张紧架设辊53与接点190的相对位置关系也保持得良好。
[0234]
进而,在转印带单元51附设有清扫单元170,即便转印带单元51的位置发生变化,由于清扫单元170追随转印带单元51而移动,因此两者的相对位置关系也保持得良好。
[0235]
比较方式2
[0236]
图23表示比较方式2的图像形成装置的一例。
[0237]
在所述图中,二次转印装置50'包括在第一张紧架设辊52'与第二张紧架设辊53'之间架设转印搬送带54'的形态的转印带单元51',本例中,包括:夹持压调整机构310,将中间转印体40的相向辊56'按压于转印带单元51'侧;及平行度调整机构320,将相向辊56'的平行度自与夹持压调整方向交叉的横方向调整。
[0238]
在本例中,针对转印带单元51'侧,不进行夹持压调整等,针对相向辊56',对夹持压与平行度进行调整。
[0239]
本例中,关于相向辊56',难以兼顾夹持压与平行度,另外,若相向辊56'的平行度调整不充分,则也会产生转印带单元51'的转印搬送带54'容易斜行的担忧。
[0240]
如上所述,可理解:与本实施方式相比,比较方式2的图像形成装置的夹持压、平行度调整容易变得不充分。
[0241]
变形方式
[0242]
本实施方式中,公开了包括夹持压切换机构120及夹持压调整机构130的形态,例如,针对预先决定了所使用的介质的种类的介质处理装置,当然可设为不使用夹持压切换机构120而仅使用夹持压调整机构130。
[0243]
另外,本实施方式中,成为如下形态:针对缩回机构110、夹持压切换机构120、夹持压调整机构130及姿势调整机构150,均使用旋转偏心构件(凸轮构件),但并不限定于此,也可设为代替旋转偏心构件而使用能够进退曲线移动的进退构件或致动器来进行位移。
[0244]
进而,本实施方式中,夹持压调整机构130分别设置于带转印模块200的前侧及后侧这两处,但考虑到调整的操作性,也可设为仅设置于带转印模块200的前侧(近前侧)。另外,关于姿势调整机构150,考虑到调整的操作性,公开了仅设置于带转印模块200的前侧(近前侧)的形态,但在想要能够在将带转印模块200搭载于装置框体21内前将转印带单元51的姿势预先调整的情况下,当然也可设为在带转印模块200的后侧(里侧)也附加姿势调整机构150。
[0245]
另外,本例中,夹持压调整机构130及姿势调整机构150是用户手动或使用夹具来调整的形态,但若采用使用驱动源或致动器来驱动夹持压调整机构130的微调整凸轮131或姿势调整机构150的位移调整凸轮169的方式,则也能够通过控制装置100来检查是否适于夹持压状态或搬送带的行走状态,从而进行自动调整。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
