1.本实用新型涉及玻璃制品及晶硅体、五金、陶瓷周边抛光领域,特别涉及一种扫光机及全自动上下料装置。
背景技术:
2.现有扫光机均为人工上下料,存在着以下不足:1、治具上的产品均由人工上下料,效率不高,一人只能兼顾少量机器,增加人力成本;2、人工上下料无法保证准确性与稳定性,不利于产品成品良率,不符合2025工业4.0战略需求和提高机械自动化程度的要求。
技术实现要素:
3.本实用新型提供一种扫光机及自动上下料装置,解决现有扫光机需要人工上下料,效率低,自动化程度低,成本高,扫光效果不稳定的问题。
4.为了实现上述目的,本实用新型提供以下技术方案:
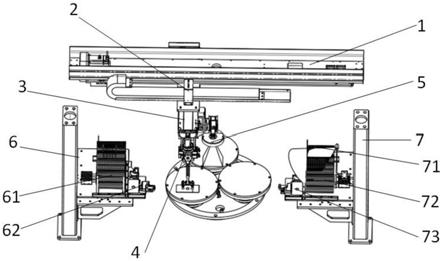
5.一种自动上下料装置,包括:y轴模组2、z轴模组3、机械手模组4、视觉定位模组5和用于与扫光机连接的x轴模组1;
6.所述y轴模组2可滑动的设置在所述x轴模组1上;
7.所述z轴模组3可滑动的设置在所述y轴模组2上,所述机械手模组4 可滑动的设置在所述z轴模组3上;
8.所述视觉定位模组5分别与所述x轴模组1、所述y轴模组2、所述z轴模组3和所述机械手模组4电连接。
9.优选的,所述机械手模组4包括机械手旋转装置41、转轴42、摆臂旋转装置43和摆动臂44;
10.所述机械手旋转装置41可滑动的设置在所述z轴模组3上;
11.所述机械手旋转装置41通过所述转轴42与摆臂旋转装置43传动连接,所述摆动臂44与所述摆臂旋转装置43转动连接。
12.优选的,所述视觉定位模组5分别与所述机械手旋转装置41和摆臂旋转装置43连接。
13.优选的,还包括吸盘45,所述吸盘45与所述摆动臂44固定连接。
14.优选的,还包括上料装置6和下料装置7,所述上料装置6包括第一载具板61和第一定位区62,所述下料装置7包括第二载具板71、第二定位区72 和喷水器73;
15.所述第一载具板61用于与所述扫光机连接,所述第一定位区62设置在所述第一载具板61上,所述第二载具板71用于与所述扫光机固定连接,所述喷水器73设置在所述第二载具板71一侧,所述第二定位区72设置在所述第二载具板71上。
16.一种扫光机,包括上述任一所述的自动上下料装置。
17.通过实施以上技术方案,具有以下技术效果:本实用新型提供的扫光机及自动上下料装置,通过机械手模组、视觉定位模组替代人工上料,实现在扫光过程中的自动上下
料,自动化程度高、成本低,扫光效果稳定,提升企业生产效率。
附图说明
18.图1为本实用新型提供的扫光机及自动上下料装置结构示意图;
19.图2为本实用新型提供的扫光机及自动上下料装置机械手模组结构示意图。
具体实施方式
20.为了更好的理解本实用新型的技术方案,下面结合附图1
‑
2详细描述本实用新型提供的实施例。
21.实施例一:一种自动上下料装置,包括:x轴模组1、y轴模组2、z轴模组3、机械手模组4和视觉定位模组5,所述视觉定位模组5上设有用于控制所述x轴模组1、所述y轴模组2、所述z轴模组3和所述机械手模组4 运动的逻辑控制器,如plc、控制芯片等,所述x轴模组1用于与扫光机固定连接,所述y轴模组2能够沿着所述x轴模组1进行滑动,所述z轴模组3能够沿着所述y轴模组2滑动,所述机械手模组4能够沿着所述z轴模组3 滑动,在进扫光的过程中,所述视觉定位模组5能够自动识别用来放置待加工工件的治具的位置,并生成第一位置信号,将所述第一位置信号传递至所述x轴模组1、y轴模组2、所述z轴模组3和所述机械手模组4,并控制所述x轴模组1、所述y轴模组2、所述z轴模组3和所述机械手模组4的运动,所述机械手模组4从所述上料装置6中,吸附需要进行加工的工件,并将所述工件进行定位,对位完成后,通过所述机械手模组4将所述工件吸取,并放置在治具中;
22.当加工完成后,所述视觉定位模组5识别加工完成后的工件所在的治具,生成第二位置信号,并将所述第二位置信号传输至所述x轴模组1、所述y 轴模组2、所述z轴模组3和所述机械手模组4,并控制所述x轴模组1、所述y轴模组2、所述z轴模组3和所述机械手模组4,所述机械手模组4从所述治具中,取出已经加工完成的工件,定位后放置在所述下料装置7中,完成全自动扫光,效率高,减少人力成本,能够保证扫光的准确性与稳定性,提升扫光的品良率。
23.在实施例一的基础上,在实施例二中,更具体的,所述机械手模组4包括机械手旋转装置41、转轴42、摆臂旋转装置43和摆动臂44,所述机械手旋转装置41可滑动的设置在所述z轴模组3上,能够沿着所述z轴模组3上下滑动,所述机械手旋转装置41通过所述转轴42与摆臂旋转装置43传动连接,在所述机械手旋转装置41的作用下,带动所述摆臂旋转装置43多角度水平旋转,所述摆动臂44与所述摆臂旋转装置43转动连接,在所述摆臂旋转装置43的作用下,所述摆动臂44能够进行竖直方向的大角度转动,从而在所述机械手旋转装置41和所述摆臂旋转装置43的作用下,实现所述摆动臂44的水平和竖直方向的角度变化。
24.在实施例二的基础上,在实施例三中,更具体的,所述视觉定位模组5 分别与所述机械手旋转装置41和摆臂旋转装置43连接,所述视觉定位模组5 生成所述第一位置信号和所述第二位置信号后,会控制所述机械手旋转装置 41和所述摆臂旋转装置43的转动角度,从而控制所述摆动臂44的转动角度,进行使与所述摆动臂44连接的所述吸盘45能够与需要加工的工件处于合适的角度,便于所述吸盘45吸附所述工件。
25.在实施例三的基础上,在实施例四中,进一步的,还包括上料装置6和下料装置7,所述上料装置6包括第一载具板61和第一定位区62,所述下料装置7包括第二载具板71、第
二定位区72和喷水器73,扫光操作时,将需要扫光的工件放置在所述第一载具板61上,通过两个一次定位气缸(图中未显示)对所述第一载具板61上的工件进行定位,当所述视觉定位模组5检测到治具中需要更换新的工件时,控制所述机械手模组4将所述工件从所述第一载具板61处取出,放置到所述第一定位区62处,通过两个二次定位气缸 (图中未显示)进行二次定位,所述机械手模组4将二次定位后的工件放置到治具上,对工件进行扫光,当扫光结束后,所述机械手模组4将加工好后的工件,放置在所述第二定位区72处进行放料的首次定位,定位后,再通过所述机械手模组4将首次定位后的工件放置在所述第二载具板71处进行再次定位,在所述第二载具板71一侧放置有述喷水器73,所述喷水器3喷洒水珠到加工完成后的工件上,对工件进行清洗,放置抛光粉尘粘附在工件上。
26.一种扫光机,包括上述任一实施例所述的自动上下料装置,在所述自动上下料装置中视觉定位模组5的作用下,对需要进行加工的工件进行识别、定位,并控制所述机械手模组4的运动,对需要加工的工件进行吸附,实现上下料过程的全自动工作。
27.以上对本实用新型实施例所提供的一种扫光机及自动上下料装置进行了详细介绍,对于本领域的一般技术人员,依据本实用新型实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。