1.本技术涉及医学教育领域,尤其涉及一种用于触诊训练的仿真机构及具有该仿真机构的触诊训练模型。
背景技术:
2.肝脏触诊检查是用于检查肝脏是否正常的一项辅助检查方法,主要用于了解肝脏下缘的位置和肝脏的质地、边缘、表面及搏动等,是医生常用的检查手法,医学院学生都应该掌握的一项技能。目前,市场上相关的模拟教学产品,大都是由一种硬质材料模拟肝脏,模拟的症状有限,无法满足教学的需求。
技术实现要素:
3.为了解决上述问题,本技术提供了一种用于触诊训练的仿真机构,包括:
4.底板,用于所述仿真机构的支撑;
5.支撑架,与所述底板连接;
6.旋转电机,固定设置于所述支撑架上,且在所述旋转电机的旋转轴上连接模拟肝;
7.其中:所述模拟肝,设置为具有至少两种硬质的肝模块。
8.进一步的,还包括水平机构,驱动所述支撑架在所述底板上水平移动。
9.进一步的,所述水平机构包括一步进电机,通过丝杠与所述支撑架固定连接,使所述支撑架沿所述丝杠轴向移动。
10.进一步的,所述水平机构包括一导轨,固定设置于所述底板上,通过滑块与所述支撑架滑动连接。
11.进一步的,还包括定位机构,用于确定所述模拟肝的旋转角度、位置。
12.进一步的,所述定位机构包括光耦合器、光挡片。
13.进一步的,还包括至少一个压力传感器。
14.进一步的,还包括至少一个液囊,设置于所述模拟肝与所述至少一个压力传感器之间。
15.进一步的,还包括导电滑环。
16.本技术还提供了一种触诊训练模型,包括前述任一项所述的用于触诊训练的仿真机构。
17.本技术的有益效果是:模拟肝设置为具有至少两种硬质的肝模块,通过旋转电机可以实现不同硬质肝模块的切换;水平机构驱动模拟肝及旋转电机等结构在底板上水平移动,实现了控制模拟肝在仿真人体上的部位;定位机构能够准确的将特定硬质的肝模块旋转至触诊部位,并进行初始位置的标定;压力传感器及液囊,提高了压力检测的受力面积和精度;导电滑环避免了连接电子器件的电线因长时间旋转可能造成断开或扭结。
附图说明
18.图1是本技术实施例用于触诊训练的仿真机构的结构示意图。
19.图2是本技术实施例模拟肝的结构示意图。
20.图3是本技术实施例水平机构的结构示意图。
21.图4是本技术实施例模拟肝与液囊的结构示意图。
22.图5是本技术又一实施例触诊训练模型中仿真机构的结构示意图。
具体实施方式
23.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术的附图,对本技术中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例,基于本技术的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有的其他实施例,均属于本技术的保护范围。
24.本技术提供了一种用于触诊训练的仿真机构,目的是为医学生提供触诊训练,在同一仿真机构上可以切换不同肝脏状态的模拟,从而提供不同的肝脏病症的模拟,操作简单便捷,效果逼真。
25.如图1所示,仿真机构10包括底板11、支撑架12、旋转电机13、模拟肝14,其中,底板11用于整个仿真机构10的支撑,支撑架12固定连接在底板11上,并固定旋转电机13,在旋转电机13旋转轴的顶部连接模拟肝14。其中,如图2(a)所示,模拟肝14由两个不同硬质的肝模块141、肝模块142组成,当旋转电机13被驱动旋转时带动模拟肝14进行旋转后,如图2(b)所示,肝模块141、肝模块142发生位置的切换,即体表触摸的软硬度的位置发生了切换,可以通过设置肝模块141、肝模块142的软硬度等来模拟肝的正常和或非正常临床表现,如,肝脏触感柔软,可被用于表现正常状态;中等硬,可被用于表现肝炎、脂肪肝及肝淤血时;高质硬,可被用于表现肝硬化、肝癌;囊性感,可被用于表现肝脓肿或囊肿有液体时。一些实施例中,模拟肝14可以设置至少两个不同硬质的肝模块,通过调整旋转的角度使体表触感位置对应的肝模块进行替换或移动。
26.一些实施例中,支撑架12可在水平机构15的驱动下,在底板11上水平移动,实现控制模拟肝在仿真人体上的部位,从而模拟肝脏下缘的位置、边缘,可用来模拟肝下移、肝肿大的变化。具体的,如图3所示,水平机构15包括一步进电机151,固定在底板11上,通过丝杠152与支撑架12固定连接,使支撑架12沿丝杠152轴向移动。为了降低支撑架12与底板11的移动摩擦,一些实施例中,还包括一导轨153,固定设置于底板11上,支撑架12与导轨153通过滑块154滑动连接。
27.在旋转电机13的驱动下,模拟肝14发生旋转,为了确保旋转角度的准确,保证相应的肝模块旋转至指定的位置,便于初始位置的标定,因此,在一些实施例中,仿真机构10还包括定位机构。一些实施例中,定位机构包括光耦合器和光挡片,光耦合器设置为两个,分别与模拟肝连接且同心旋转,光挡片设置为与支撑架固定连接,当光耦合器旋转至光挡片位置时,光信号被隔离,则,表示旋转至指定位置,起到定位的作用。当模拟肝14具有多个不同硬质的肝模块时,也可以根据旋转的角度适当调节光耦合器和/或光挡片的个数、位置等。
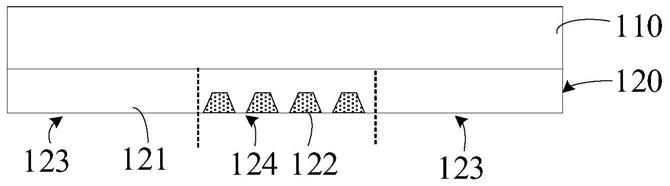
28.一些实施例中,为了监测触诊操作,获取操作数据,在模拟肝14的触诊部位设置压
力传感器,可以是在每个肝模块的相应位置均设置压力传感器。一些实施例中,采用液压传感器,并在液压传感器与肝模块之间设置液囊,不仅增大了检测面积,也提高了检测的精度,这里所说的液囊是容纳液体的囊,优选液体为石蜡。具体的,如图4所示,模拟肝14由正常肝模块143(可以理解为是正常软质材料的肝模块)、病状肝模块144(可以理解为是硬质材料的肝模块)组成,并分别在两个肝模块的下方均设置液囊1431、1441,和液压传感器,分别用于当正常肝模块143、病状肝模块144经旋转后分别处于触诊位置时的压力检测。一些实施例中,液囊、液压传感器还可以设置用于检测位于肝模块下方胆囊触诊时的压力检测,如图4中虚线所示。
29.由于整个模拟肝14与旋转电机13及传感器、光耦合器等结构的高度集成,长时间的旋转有可能造成连通的导线发生断开或扭结,降低了机构的稳定性,因此,一些实施例中,设置了导电滑环。
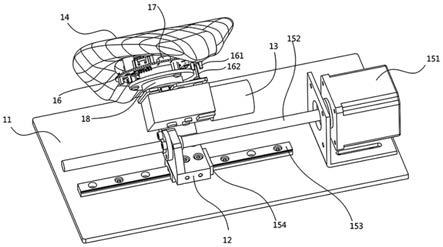
30.本技术实施例还提供了一种具有该仿真机构的触诊训练模型,可以为半身人体模型,外表为具有真实触感的硅胶材料制成,内部具有人体解剖结构及该仿真机构。如图5所示,仿真机构10包括底板11、支撑架12、旋转电机13、模拟肝14,水平机构、定位机构,其中:
31.模拟肝14由软硬两个肝模块组成,旋转电机13的旋转轴顶部连接模拟肝14,旋转电机13带动模拟肝14发生旋转,使触诊部位的模拟肝14能够进行两种硬质的肝模块的切换,以模拟不同的肝病变状态;
32.支撑架12为具有侧面的斜角部件,底部与滑块154固定连接,侧面与丝杠152固定连接,斜角面固定旋转电机13;
33.水平机构包括固定连接在底板11上的步进电机151、与步进电机151传动连接的丝杠152、固定连接在底板11上的导轨153、滑块154,步进电机151驱动支撑架12带动模拟肝14沿丝杠152轴向移动,使模拟肝14相对于人体模型发生水平位移,使触诊操作者能够触摸到的模拟肝14的大小发生变化。如,当沿轴向位移过大时,表示可触摸到的模拟肝14的边缘过大,此时,可以模拟肝脏的肿大、或肝下移等症状;
34.模拟肝14连接一固定板16,本实施例中,固定板16为电路板,与模拟肝14同心旋转,在固定板16上固定设置两个光耦合器161,光挡片162固定于支撑架12上;固定板16上设置四个压力传感器17,分别对应两个肝模块对应的肝部位和胆囊位置,在压力传感器17与模拟肝14之间分别设置液囊,可参考图4所示;
35.在模拟肝14与旋转电机13之间设置一导电滑环18,其外环与模拟肝14固定连接同心旋转,通过导电滑环18避免了导线缠绕问题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。