1.本发明涉及信号分析领域技术领域,具体为一种基于多维离散信号分析的模拟驾驶评判方法。
背景技术:
2.将时间不连续但幅值仍连续的信号称为离散信号,由于离散信号的幅值仍然连续,因此离散信号仍然属于模拟信号。
3.离散信号是在连续信号上采样得到的信号,与连续信号的自变量是连续的不同,离散信号是一个序列,即其自变量是“离散”的,这个序列的每一个值都可以被看作是连续信号的一个采样。
4.由于离散信号只是采样的序列,并不能从中获得采样率,因此采样率必须另外存储,以时间为自变量的离散信号为离散时间信号。
5.离散信号并不等同于数字信号,数字信号不仅是离散的,而且是经过量化的,即,不仅其自变量是离散的,其值也是离散的,因此离散信号的精度可以是无限的。
6.而数字信号的精度是有限的,而有着无限精度,亦即在值上连续的离散信号又叫抽样信号,所以离散信号包括了数字信号和抽样信号。
7.多维处理意味着产生多功能信号波形并且以适当的方式顺序的发射和接收,这种信号是编码的。
8.此外,处理器应处理属于多个域的数据(矢量处理方式),目前还没有一种适于处理这种多个域的编码波形的设计及其相应的矢量代处理结构的统一的理论。
9.模拟驾驶又称汽车驾驶仿真,或汽车虚拟驾驶,模拟驾驶让体验者在一个虚拟的驾驶环境中,使其感受接近真实效果的视觉、听觉和体感的汽车驾驶体验,驾驶模拟效果逼真、节能、安全、经济,不受时间、气候、场地的限制,驾驶训练效率高、培训周期短等优势,在新车型开发和驾驶培训方面应用十分广泛。
10.基于单向视频交互的模拟驾驶训练课程,我们需要一种能够判断学员训练效果的评判算法,此算法能够匹配评判学员在驾驶模拟器上的实时传感器操作数据与预先录入到本地的传感器离散信号数据,得出一个匹配度相似度。
11.从而得出一个可供展示的评判结果,有利于学员进行视频模拟驾驶训练时,判断自身的训练情况,给出学员应当改进或改正的问题。
12.现有的人在学习汽车驾驶的时候,或多或少都会有一些操作不当的习惯问题,需要解决。
技术实现要素:
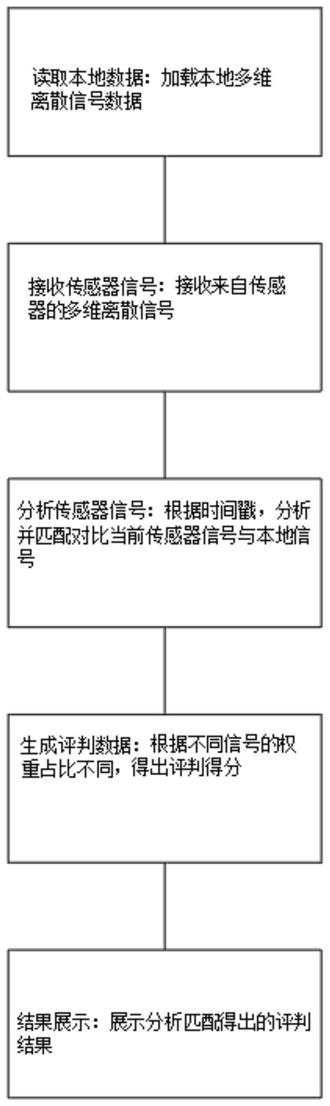
13.鉴于现有技术中所存在的问题,本发明公开了一种基于多维离散信号分析的模拟驾驶评判方法,采用的技术方案是,包括以下步骤:步骤1:读取本地数据,加载本地多维离散信号数据,通过本地储存的多维离散信
号数据,便于操作人员,在进行相应操作的时候,以本地离散数据为准,防止出现操作失误;步骤2:接收传感器信号,接收来自传感器的多维离散信号,接收传感器信号接收到的不同数据,本记录当前数据发生的时间戳;步骤3:分析传感器信号,根据时间戳,分析并匹配比对当前传感器信号与本地信号,通过分析传感器信号,分析不同时间戳的信号,并将其与本地数据进行相对应的比较;步骤4:生成评判数据,根据不同信号的权重占比不同,得出评判得分,通过不同信号的权重占比不同,使其在模拟驾驶的时候区分出不同信号的重要性占比;步骤5:结果展示,展示分析匹配得出的评判结果,通过将评判结果展示出来,以便于当前的驾驶人员得知自己的不足处,以便于后续的驾驶人员,注意易错点。
14.作为本发明的一种优选技术方案,所述步骤1中,通过本地数据是预先通过一系列操作保存在模拟器电脑本地的json格式文件,程序根据名称加载对应的json数据文件,通过电脑本地的json格式文件和名称对应的json数据文件相对应,以便于后续模拟驾驶的使用。
15.作为本发明的一种优选技术方案,所述步骤2中,通过程序接收来自模拟器传感器的多维离散信号,形如以下标量:的多维离散信号,形如以下标量:其中f
n
(t)代表不同的传感器信号数据,n表示维度,t表示视频当前播放的时间戳,目前模拟器传感器发出的离散信号值仅包括0或1,即f
n
(t)∈{0,1},通过接收传感器接收到不同时间段接收到的多维离散信号,以便于接收传感器记录。
16.作为本发明的一种优选技术方案,所述步骤3中,程序实时接收来自模拟器的离散信号,当检测到不同的离散信号f
n
(t
i
)与上一刻的值f
n
(t
i
‑
1)对比发生变化时,将当前接收到的传感器离散信号f
n
(t
i
)与预存在本地的离散信号数据进行分析对比,这里设一个时间偏差值δt,根据当前视频时间戳t
i
,遍历本地离散信号数据,在t
i
‑
δt到t
i
δt范围内检索需要匹配的离散信号数据f
n
(t
k
),f
n
(t
k
‑
1),λλ,f
n
(t
k
j),其中k>t
i
‑
δt,k j<t
i
δt,组成评判数据组,当评判数据组内,存在数据信号值与当前信号值相同的情况,则匹配比对通过,这里设立一个时间偏差范围的目的是,允许学员在训练的操作过程中,有一些时间偏差上的容忍度,数据录入时的时间戳是绝对的,但是在实际操作训练时,一定会存在一些毫秒级上的时间误差,这是能够允许容忍的,目前传感器的离散信号有两种:bool值类型的信号和int值类型的信号,通过程序接收到模拟器的离散信号,并且此刻的离散信号与上一刻的离散信号出现变化时,与本地的离散信号做出比较,以便于进行分析对比。
17.作为本发明的一种优选技术方案,所述bool值类型的信号包括电源、点火、左转灯、右转灯、近光灯、远光灯、交换远近灯、安全带、手刹、应急灯、喇叭、雨刮器,通过bool值的信号包括电源、点火、左转灯、右转灯、近光灯、远光灯、交换远近灯、安全带、手刹、应急灯、喇叭、雨刮器,以便于操作人员在在模拟时,根据不同的模拟环境,启动不同的信号以应对,使其在真正的驾驶环境中可以快速做出反应。
18.作为本发明的一种优选技术方案,所述int值类型的信号包括车辆档位一档、二档、三档、四挡、五档、六档。
19.作为本发明的一种优选技术方案,所述步骤4中,在每个分析过程中,每次离散信号的匹配结果存在两种状态匹配通过与匹配不通过,当匹配通过时,根据不同信号的权重ω1,ω2,ω3,ω4,λλ,ω
n
计算得分,并结合总接收信号数据数量得到总匹配度,更进一步
可根据学员的操作习惯,结合通用误操作记录库进行大数据分析,判断出学员在哪一方面更加不足,给出学员应当着重改进或必须改正的问题,通过不同信号的权重占比不同,以实现不同信号的重要程度。
20.作为本发明的一种优选技术方案,所述步骤5中,程序展示分析匹配得到的评判结果,并上传相应结果数据到后台服务器,通过评判结果使操作人员方便得知,自己在进行模拟驾驶的时候,都在什么时间段,启动了那个信号,并结合本地的多维数据,生成相应的报告,以便于之后的操作过程中,侧重练习,及时规范操作。
21.本发明的有益效果:本发明通过单向视频交互的模拟训练课程,学员在训练的时候,可以通过本地数据内的多为离散信号数据,在做出相应的操作反应的时候,通过接收来自传感器的多维离散信号,并根据学员在不同时间段做出的相应信号反应,来与本地数据进行匹配,并根据bool值信号和int值信号不同的权重占比,已对其进行评分,并展示该学员的操作结果,以得知该学员的侧重点和需要加强训练的薄弱点,从而得出一个可供展示的评判结果,有利于学员进行视频模拟驾驶训练时,判断自身的训练情况,给出学员应当改进或改正的问题。
22.进一步的,通过分为bool值信号和int信号,以便于区分不同信号的权重占比,以便于划分不同信号的重要程度。
附图说明
23.图1为本发明结构示意图;
24.图2为本发明结构示意图之图二;
25.图3为本发明结构示意图之图三;
26.图4为本发明结构示意图之图四;
27.图5为本发明结构示意图之图五;
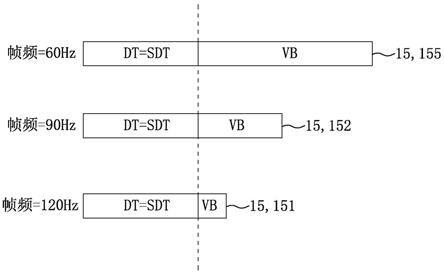
28.图6为本发明某一信号在不同时间轴时的信号值。
具体实施方式
29.实施例1
30.如图1至图6所示,本发明公开了一种基于多维离散信号分析的模拟驾驶评判方法,采用的技术方案是,包括以下步骤:步骤1:读取本地数据,加载本地多维离散信号数据,便于操作人员,在进行相应操作的时候,以本地离散数据为准,有一个参考系数,防止出现操作失误;步骤2:接收传感器信号,接收来自传感器的多维离散信号,接收传感器信号接收到的不同数据,本记录当前数据发生的时间戳;步骤3:分析传感器信号,根据时间戳,分析并匹配比对当前传感器信号与本地信号,通过记录多维离散信号的不同时间点,以便于得知不同信号的使用次数和在什么样的模拟情况下使用;步骤4:生成评判数据,根据不同信号的权重占比不同,得出评判得分,通过不同信号的权重占比不同,使其在模拟驾驶的时候区分出不同信号的重要性占比;步骤5:结果展示,展示分析匹配得出的评判结果,通过将评判结果展示出来,以便
于当前的驾驶人员得知自己的不足处,以便于后续的驾驶人员,注意易错点。
31.作为本发明的一种优选技术方案,所述步骤1中,通过本地数据是预先通过一系列操作保存在模拟器电脑本地的json格式文件,程序根据名称加载对应的json数据文件,通过电脑本地的json格式文件和名称对应的json数据文件相对应,以便于后续模拟驾驶的使用。
32.作为本发明的一种优选技术方案,所述步骤2中,通过程序接收来自模拟器传感器的多维离散信号,形如以下标量:的多维离散信号,形如以下标量:其中f
n
(t)代表不同的传感器信号数据,n表示维度,t表示视频当前播放的时间戳,目前模拟器传感器发出的离散信号值仅包括0或1,即f
n
(t)∈{0,1},多为离散信号即表示为多种并列不同的信号。
33.作为本发明的一种优选技术方案,所述步骤3中,程序实时接收来自模拟器的离散信号,当检测到不同的离散信号f
n
(t
i
)与上一刻的值f
n
(t
i
‑
1)对比发生变化时,将当前接收到的传感器离散信号f
n
(t
i
)与预存在本地的离散信号数据进行分析对比,这里设一个时间偏差值δt,根据当前视频时间戳t
i
,遍历本地离散信号数据,在t
i
‑
δt到t
i
δt范围内检索需要匹配的离散信号数据f
n
(t
k
),f
n
(t
k
‑
1),λλ,f
n
(t
k
j),其中k>t
i
‑
δt,k j<t
i
δt,组成评判数据组,当评判数据组内,存在数据信号值与当前信号值相同的情况,则匹配比对通过,这里设立一个时间偏差范围的目的是,允许学员在训练的操作过程中,有一些时间偏差上的容忍度。数据录入时的时间戳是绝对的,但是在实际操作训练时,一定会存在一些毫秒级上的时间误差,这是能够允许容忍的,通过允许毫秒级的时间误差,使其更加的贴紧现实中的驾驶环境,目前传感器的离散信号有两种:bool值类型的信号和int值类型的信号,通过信号分为两种,以便做出区分,并将两种不同的信号设置相应的权重占比,以确保模拟驾驶的真实性。
34.作为本发明的一种优选技术方案,所述bool值类型的信号包括电源、点火、左转灯、右转灯、近光灯、远光灯、交换远近灯、安全带、手刹、应急灯、喇叭、雨刮器,通过bool值的信号包括电源、点火、左转灯、右转灯、近光灯、远光灯、交换远近灯、安全带、手刹、应急灯、喇叭、雨刮器,以便于操作人员在在模拟时,根据不同的模拟环境,启动不同的信号以应对,使其在真正的驾驶环境中可以快速做出反应。
35.作为本发明的一种优选技术方案,所述int值类型的信号包括车辆档位一档、二档、三档、四挡、五档、六档,通过int值类型的信号包括一档、二档、三档、四挡、五档、六档,便于操作人员在模拟驾驶的时候,根据不同情况做出相应的操作,便于后续熟练操作。
36.作为本发明的一种优选技术方案,所述步骤4中,在每个分析过程中,每次离散信号的匹配结果存在两种状态匹配通过与匹配不通过,当匹配通过时,根据不同信号的权重ω1,ω2,ω3,ω4,λλ,ω
n
计算得分,并结合总接收信号数据数量得到总匹配度,更进一步可根据学员的操作习惯,结合通用误操作记录库进行大数据分析,判断出学员在哪一方面更加不足,给出学员应当着重改进或必须改正的问题。
37.作为本发明的一种优选技术方案,所述步骤5中,程序展示分析匹配得到的评判结果,并上传相应结果数据到后台服务器,通过评判结果使操作人员方便得知,自己在进行模拟驾驶的时候,都在什么时间段,启动了那个信号,并结合本地的多维数据,生成相应的报告,以便于之后的操作过程中,侧重练习,及时规范操作。
38.本发明涉及的电路连接为本领域技术人员采用的惯用手段,可通过有限次试验得到技术启示,属于公知常识。
39.本文中未详细说明的部件为现有技术。
40.上述虽然对本发明的具体实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。