1.本发明涉及有源噪声控制技术领域,具体为一种基于灰狼算法的主动噪声控制方法及系统。
背景技术:
2.随着工业化的不断发展,噪声污染逐渐成为影响人们生活的一个重要问题,而针对噪声问题处理,目前主要可分为两大类:主动降噪和被动降噪。被动降噪对于低频噪声的处理能力较弱,而主动降噪由于采用相消性干涉的手段能有效地抑制低频噪音。
3.随着对各种问题的理论和技术解决方案的日益复杂,anc的趋势是走向更广泛的算法,以抑制复杂的噪声模式,包括解决三维空间和时变信号等。
4.grey wolf optimizer是mirjalili等在2014年提出的一种新的算法。该算法的灵感来自于灰狼的社会行为,灰狼被认为是顶级掠食者,它们生活在一个群体中,大小为5
‑
12只狼。根据捕猎策略,灰狼分为四类:α、β、γ和ω,共同合作完成猎物的捕捉。α狼是狼群的首领。它适用于领导阶层的狩猎策略,是由于群体狩猎策略而引起的一种有趣的算法。
5.anc的滤波器参数的优化是实现较好的降噪性能的关键,目前市场上也已经有众多关于anc解决方案的研究成果,但是存在求解精度差以及求解速度低的问题,目前尚未有将灰狼算法应用于anc领域的相关研究。
技术实现要素:
6.本发明提供了一种基于灰狼算法的主动噪声控制方法及系统,将灰狼算法与主动降噪相结合,能够提高主动降噪的求解精度和收敛速度,进而实现较好的降噪性能。
7.为了解决上述技术问题,本申请提供如下技术方案:
8.一种基于灰狼算法的主动噪声控制方法,包括以下步骤:
9.s100:建立有源噪声控制系统的灰狼算法模型;
10.s200:迭代计算得到α狼的位置,将计算结果作为优化后的滤波器系数;
11.所述s100包括:
12.s110:初始化灰狼种群的个体位置,作为滤波器系数向量;
13.s120:根据主动噪声控制系统确定适应度函数的表达式;
14.s130:计算所有初始化的灰狼个体的适应度,并找到适应度前三的灰狼分别作为α、β和γ;
15.所述s200包括:
16.s210:根据灰狼群体的围猎行为更新灰狼的位置;
17.s220:计算所有灰狼的适应度,并按照适应度的高低对其进行排序;
18.s230:选择适应度前q只狼在其邻域内进行竞争游走;
19.s240:更新α、β和γ狼的适应度和位置;
20.s250:当满足迭代收敛条件后,将α狼的位置作为最优滤波器系数向量。
21.进一步,所述s210包括:
22.s211:灰狼的位置根据种群中的α、β和γ狼的位置来进行更新,按照下式计算α、β和γ狼与种群中其他个体的距离:
23.d
α
=|c1*x
α
‑
x|
24.d
β
=|c2*x
β
‑
x|
25.d
γ
=|c3*x
γ
‑
x|
26.其中,x
α
、x
β
和x
γ
分别表示α、β和γ狼的位置,x表示当前灰狼个体的位置;c1、c2和c3是位置系数向量,c1、c2和c3内的每个元素值均为0到2之间的随机数;d
α
、d
β
和d
γ
分别表示α、β和γ狼与种群中其他个体的距离;
27.s212:分别由α、β和γ狼的信息反馈,按照下式更新灰狼的初步位置x1、x2和x3:
28.x1=x
α
‑
a1*d
α
29.x2=x
β
‑
a2*d
β
30.x3=x
γ
‑
a3*d
γ
31.其中,a1、a2和a3是距离系数向量;
32.s213:按下式取平均值更新灰狼在第t 1次迭代的位置x(t 1):
[0033][0034]
进一步,所述a1、a2和a3的表达式如下:
[0035]
a
i
=2*a*r
‑
a
[0036]
其中,r为与距离系数向量同维度的向量,其元素为0到1之间的随机数,a为收敛因子,其值随着迭代次数的增大逐渐从2线性减小到0。
[0037]
进一步,所述s230包括:q只灰狼中的第i只灰狼的第d维分量x
id
按照下式进行竞争游走:
[0038]
x
id
=x
id
rand*(δ)
[0039]
其中,δ为x
id
的领域范围,rand为0到1之间的随机数。
[0040]
进一步,所述s240包括:灰狼位置向量计算出的误差均方值越小,灰狼的适应度越高,α、β和γ狼进行更新时,需要将当前迭代下适应度最高的三头灰狼与α、β和γ狼进行适应度排序,最后选取适应度最高的三头狼分别为新的α、β和γ狼。
[0041]
进一步,所述s250包括:当循环不满足迭代要求时,重复步骤s210、s220和s230。
[0042]
进一步,所述s210中需要进行位置更新的灰狼为种群中除α、β和γ狼以外的所有灰狼群体ω。
[0043]
进一步,所述s212包括:判断距离系数向量的绝对值是否大于1,若距离系数向量a的绝对值大于1,则算法处于搜索猎物模式;若距离系数向量a的绝对值小于1,算法处于攻击猎物模式。
[0044]
进一步,本申请还公开了一种基于灰狼算法的主动噪声控制系统,使用了上述的一种基于灰狼算法的主动噪声控制方法。
[0045]
本发明技术方案的有益效果为:
[0046]
本发明技术方案中,将灰狼算法与主动降噪相结合,具有结构简单、需要调节的参数少,容易实现等特点。通过能够自适应调整的收敛因子和信息反馈机制以及创新性的竞
争游走策略,可以使算法能够在局部寻优与全局搜索之间实现平衡,因此很好地提高了主动降噪的求解精度和收敛速度,实现较好的降噪性能。
附图说明
[0047]
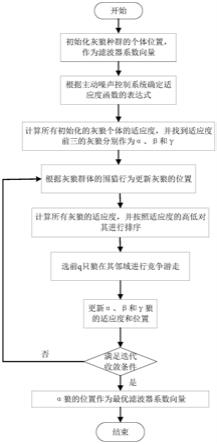
图1为本发明中一种基于灰狼算法的主动噪声控制方法及系统实施例中的算法流程图;
[0048]
图2为本发明中一种基于灰狼算法的主动噪声控制方法及系统实施例中前馈主动噪声控制系统图;
[0049]
图3为本发明中一种基于灰狼算法的主动噪声控制方法及系统实施例中反馈主动噪声控制系统图。
具体实施方式
[0050]
下面通过具体实施方式进一步详细说明:
[0051]
本实施例的一种基于灰狼算法的主动噪声控制系统使用了一种基于灰狼算法的主动噪声控制方法,该基于改进灰狼算法的主动噪声控制系统包括前馈降噪部分和反馈降噪部分,如图2所示,噪声声源产生的噪声信号为x(n),一路经过初级通道p(z),另一路经过次级通道g(z)和前馈滤波器w(z)。通过本实施例的改进灰狼算法(gwo)控制w(z)的值,使得输出的误差信号e(n)尽可能地接近0,也即使得两个信号叠加产生相消性干涉,从而实现前馈降噪。
[0052]
如图3所示,噪声声源产生的噪声信号为x(n)经过初级通道p(z),与另一路信号叠加得到误差信号e(n)。同时,误差信号通过反馈并经过次级通道g(z)和前馈滤波器w(z),与经过初级通道p(z)后的噪声信号叠加,通过本实施例的改进灰狼算法(gwo)控制w(z)的值,使得输出的误差信号e(n)尽可能地接近0,也即使得两个信号叠加产生相消性干涉,从而实现反馈降噪。
[0053]
如图1所示,本实施例所述的一种基于灰狼算法的主动噪声控制方法,包括以下步骤:
[0054]
s100:建立有源噪声控制系统的灰狼算法模型;
[0055]
s200:迭代计算得到α狼的位置,将计算结果作为优化后的滤波器系数;
[0056]
具体的,s100包括:
[0057]
s101:基于主动降噪原理建立有源噪声控制系统;具体包括:
[0058]
s101
‑
1:建立前馈主动噪声控制系统,包括初级通道响应p(z)、次级通道响应g(z)以及滤波器响应w(z),噪声信号x(n)分别经过初级通道和加上滤波器的次级通道后合成误差信号e(n),作为灰狼算法gwo的适应度函数。初级通道响应p(z)表示从噪声声源到人耳(戴着耳机的时候)的声学传递方程,次级通道响应g(z)指的是从耳机喇叭到人耳的声学传递方程。
[0059]
s101
‑
2:建立反馈主动噪声控制系统,包括初级通道响应p(z)、次级通道响应g(z)以及滤波器响应w(z),合成的误差信号e(n)作为灰狼算法gwo的适应度函数的同时,也作为反馈信号,其经过加上滤波器的次级通道后,与经过初级通道的噪声信号合成新的误差信号。
[0060]
s102:根据有源噪声控制系统的传递函数及误差信号均方值确定灰狼算法的适应度函数表达式;误差信号均方值为:
[0061][0062]
其中,n表示采样点的个数,e
k
(n)表示第k个采样点的误差均方值。
[0063]
s110:初始化灰狼种群的个体位置,作为滤波器系数向量;
[0064]
s120:根据主动噪声控制系统确定适应度函数的表达式;其中误差信号在频域的表示为:
[0065]
e(z)=x(z)p(z)
‑
g(z)w(z),ff
[0066][0067]
其中,x(z)为噪声信号在频域的表示。
[0068]
s130:计算所有初始化的灰狼个体的适应度,并找到适应度前三的灰狼分别作为α、β和γ;
[0069]
所述s200包括:
[0070]
s210:根据灰狼群体的围猎行为更新灰狼的位置;
[0071]
s220:计算所有灰狼的适应度,并按照适应度的高低对其进行排序;
[0072]
s230:选择适应度前q只狼在其邻域内进行竞争游走;本实施例中,q的值为30。
[0073]
s240:更新α、β和γ狼的适应度和位置;
[0074]
s250:当满足迭代收敛条件后,将α狼的位置作为最优滤波器系数向量;当循环不满足迭代要求时,重复步骤s210、s220和s230。
[0075]
s210需要进行位置更新的灰狼为种群中除α、β和γ狼以外的所有灰狼群体ω。s210具体包括:
[0076]
s211:灰狼的位置根据种群中的α、β和γ狼的位置来进行更新,按照下式计算α、β和γ狼与种群中其他个体的距离:
[0077]
d
α
=|c1*x
α
‑
x|
[0078]
d
β
=|c2*x
β
‑
x|
[0079]
d
γ
=|c3*x
γ
‑
x|
[0080]
其中,x
α
、x
β
和x
γ
分别表示α、β和γ狼的位置,x表示当前灰狼个体的位置;c1、c2和c3是位置系数向量,c1、c2和c3内的每个元素值均为0到2之间的随机数;d
α
、d
β
和d
γ
分别表示α、β和γ狼与种群中其他个体的距离;
[0081]
s212:分别由α、β和γ狼的信息反馈,按照下式更新灰狼的初步位置x1、x2和x3:
[0082]
x1=x
α
‑
a1*d
α
[0083]
x2=x
β
‑
a2*d
β
[0084]
x3=x
γ
‑
a3*d
γ
[0085]
其中,a1、a2和a3是距离系数向量;a1、a2和a3的通用表达式如下:
[0086]
a
i
=2*a*r
‑
a
[0087]
其中,r为与距离系数向量同维度的向量,其元素为0到1之间的随机数,a为收敛因
子,其值随着迭代次数的增大逐渐从2线性减小到0。
[0088]
s213:按下式取平均值更新灰狼在第t 1次迭代的位置x(t 1):
[0089][0090]
具体的,在本实施例中,s230包括:30只灰狼中的第i只灰狼的第d维分量x
id
按照下式进行竞争游走:
[0091]
x
id
=x
id
rand*(δ)
[0092]
其中,δ为x
id
的领域范围,rand为0到1之间的随机数。
[0093]
s240包括:灰狼位置向量计算出的误差均方值越小,灰狼的适应度越高,α、β和γ狼进行更新时,需要将当前迭代下适应度最高的三头灰狼与α、β和γ狼进行适应度排序,最后选取适应度最高的三头狼分别为新的α、β和γ狼。
[0094]
s212包括:判断距离系数向量的绝对值是否大于1,若距离系数向量a的绝对值大于1,则算法处于搜索猎物模式;若距离系数向量a的绝对值小于1,算法处于攻击猎物模式。通过距离向量绝对值调整模式,即保证了算法的全局寻优能力,又保证了算法的快速收敛。
[0095]
以上的仅是本发明的实施例,该发明不限于此实施案例涉及的领域,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

