1.本发明涉及一种土地治理领域,尤其涉及一种可适应多种格数的土地治理用土工格室铺设装置。
背景技术:
2.现有技术中,石漠化会造成植被结构简单化、生态系统简单化,现有装置对石漠化土地进行治理时,先在土地上方铺设土工布,然后将营养土铺设在土工布上方,再将营养土夯实,然后将土工格室铺设在营养土层上方,而土工布相对柔软,铺设过程中土工布会出现起皱现象,同时在将营养土夯实的过程中,营养土层边缘会向外侧延伸,使营养土层超出土工布,同时土地中含有尖锐的石块,夯实过程中尖锐石块会划破土工布,大大降低结构稳定性,此外,现有装置铺设土工格室时,只能将一种特定规格的土工格室充分展开,同时现有装置将土工格室展开后直接铺设至营养土层上方,在弹性的作用下土工格室出现回弹现象,导致部分格室变小,严重影响后续种植工序。
3.综上,需要研发一种可适应多种格数的土地治理用土工格室铺设装置,来克服上述问题。
技术实现要素:
4.为了克服现有装置对石漠化土地进行治理时,由于土工布相对柔软,导致铺设过程中土工布会出现起皱现象,同时在将营养土夯实的过程中,营养土层边缘会向外侧延伸,使营养土层超出土工布,同时土地中含有尖锐的石块,夯实过程中尖锐石块会划破土工布,大大降低结构稳定性,此外,现有装置铺设土工格室时,只能将一种特定规格的土工格室充分展开,同时现有装置将土工格室展开后直接铺设至营养土层上方,在弹性的作用下土工格室出现回弹现象,导致部分格室变小,严重影响后续种植工序的缺点,技术问题:提供一种可适应多种格数的土地治理用土工格室铺设装置。
5.技术方案如下:一种可适应多种格数的土地治理用土工格室铺设装置,包括有底架、控制屏、车轮、工具盒、第一固定架、第二固定架、第一支撑架、第一配重块、营养土铺设组件、夯实组件和土工格室铺设组件;底架与控制屏进行固接;底架与四组车轮进行固接;底架与工具盒进行固接;底架与第一固定架进行固接;底架与第二固定架进行固接;底架与第一支撑架进行固接;底架与可将土工布和营养土铺设至地面的营养土铺设组件进行固接;底架通过连接块与营养土铺设组件进行转动连接;底架与可将营养土夯实的夯实组件进行固接;底架与可将土工格室铺设在营养土层上方的土工格室铺设组件进行固接;第一支撑架与多组第一配重块相接触;营养土铺设组件与夯实组件进行固接;夯实组件与土工格室铺设组件进行固接。
6.作为优选,营养土铺设组件包括有第一电机、第一花键轴、第一滑块、第一电动滑轨、第一锥齿轮、第二锥齿轮、第一丝杆、第二滑块、第一导轨块、第一联动块、第二联动块、第二支撑架、第二电动推杆、第一限位块、第一电动推杆、第二限位块、第一限位框、第一限
位杆、第一弹簧、第一电动夹具、第二限位杆、第二弹簧和第二电动夹具;第一电机输出端与第一花键轴进行固接;第一电机与底架进行固接;第一花键轴的轴杆与第一滑块进行转动连接;第一花键轴的轴杆与第一锥齿轮进行固接;第一花键轴的轴套通过连接块与底架进行转动连接;第一花键轴的轴套与夯实组件进行固接;第一滑块与第一电动滑轨进行滑动连接;第一电动滑轨与底架进行固接;第一锥齿轮一侧设置有第二锥齿轮;第二锥齿轮内部与第一丝杆进行固接;第一丝杆外表面与第二滑块进行旋接;第一丝杆外表面与第一导轨块进行转动连接;第二滑块与第一导轨块进行滑动连接;第二滑块与第一联动块进行固接;第一导轨块与第二支撑架进行固接;第一联动块与第二联动块进行固接;第二联动块与第二电动推杆进行固接;第二联动块与第一限位块进行固接;第二联动块与第一限位框进行固接;第二支撑架与底架进行固接;第二电动推杆与第一限位块进行固接;第一限位块与第一限位框进行滑动连接;第一电动推杆与第二限位块进行固接;第二限位块与第一限位框进行滑动连接;第一限位框与两组第一限位杆进行固接;第一限位框与两组第一弹簧进行固接;第一限位框与两组第二限位杆进行固接;第一限位框与两组第二弹簧进行固接;两组第一限位杆均与第一电动夹具进行滑动连接;两组第一弹簧均与第一电动夹具进行固接;两组第二限位杆均与第二电动夹具进行滑动连接;两组第二弹簧均与第二电动夹具进行固接。
7.作为优选,夯实组件包括有第一传动轮、第二传动轮、第一传动杆、第三联动块、第一拨杆、第一滑槽块、第一推杆、第一滑套块、第一压板和第三支撑架;第一传动轮通过皮带与第二传动轮进行传动连接;第二传动轮内部与第一传动杆进行固接;第一传动杆与第三联动块进行固接;第一传动杆外表面与第三支撑架进行转动连接;第一传动杆外表面与第一花键轴进行固接;第一传动杆外表面与土工格室铺设组件进行固接;第三联动块与第一拨杆进行固接;第一拨杆与第一滑槽块进行传动连接;第一滑槽块与第一推杆进行固接;第一推杆与第一滑套块进行滑动连接;第一推杆与第一压板进行固接;第一滑套块与第三支撑架进行固接;第三支撑架与底架进行固接。
8.作为优选,土工格室铺设组件包括有第三传动轮、第四传动轮、第二花键轴、第三滑块、第二电动滑轨、第三锥齿轮、第四锥齿轮、第二丝杆、第四滑块、第二导轨块、第一联动架、第三导轨块、第四支撑架、第四导轨块、第三电动推杆、第四电动推杆、第五电动推杆、第六电动推杆、第一限位机构、第二限位机构、第五支撑架、第三限位块、第七电动推杆、第八电动推杆、第六支撑架、第四限位块、第九电动推杆、第十电动推杆、第七支撑架和第五限位块;第三传动轮通过皮带与第四传动轮进行传动连接;第三传动轮内部与第一传动杆进行固接;第四传动轮内部与第二花键轴进行固接;第二花键轴的轴套与第四支撑架进行转动连接;第二花键轴的轴杆与第三滑块进行转动连接;第二花键轴的轴杆与第三锥齿轮进行固接;第三滑块与第二电动滑轨进行滑动连接;第二电动滑轨与第四支撑架进行固接;第三锥齿轮一侧设置有第四锥齿轮;第四锥齿轮内部与第二丝杆进行固接;第二丝杆外表面与第四滑块进行旋接;第二丝杆外表面与第二导轨块进行固接;第四滑块与第二导轨块进行滑动连接;第四滑块与第一联动架进行固接;第四滑块与第四支撑架进行固接;第一联动架与第三导轨块进行固接;第一联动架与第四导轨块进行固接;第三导轨块通过连接块与第三电动推杆进行固接;第三导轨块通过连接块与第四电动推杆进行固接;第三导轨块与第一限位机构进行滑动连接;第三导轨块与第二限位机构进行滑动连接;第四支撑架与底架
进行固接;第四导轨块通过连接块与第五电动推杆进行固接;第四导轨块通过连接块与第六电动推杆进行固接;第四导轨块与第一限位机构进行滑动连接;第四导轨块与第二限位机构进行滑动连接;第三电动推杆与第一限位机构进行固接;第四电动推杆与第二限位机构进行固接;第五电动推杆与第一限位机构进行固接;第六电动推杆与第二限位机构进行固接;第六电动推杆上方设置有第五支撑架;第五支撑架与多组第三限位块进行固接;第五支撑架与第七电动推杆进行固接;第五支撑架与第八电动推杆进行固接;第五支撑架与第九电动推杆进行固接;第五支撑架与第十电动推杆进行固接;第五支撑架与底架进行固接;第七电动推杆与第六支撑架进行固接;第八电动推杆与第六支撑架进行固接;第六支撑架与多组第四限位块进行固接;第九电动推杆与第七支撑架进行固接;第十电动推杆与第七支撑架进行固接;第七支撑架与多组第五限位块进行固接。
9.作为优选,第一限位机构包括有第一滑杆、第二联动架、第十一电动推杆、第一联动杆、第三限位杆、第四限位杆、第三电动滑轨和第五滑块;第一滑杆与两组第二联动架进行固接;第一滑杆与第四限位杆进行固接;两组第二联动架分别与两组第十一电动推杆进行固接;两组第十一电动推杆均与第一联动杆进行固接;第一联动杆与多组第三限位杆进行固接;多组第三限位杆均与第一滑杆进行滑动连接;第四限位杆与第三电动滑轨进行固接;第三电动滑轨与第五滑块进行滑动连接;第四限位杆、第三电动滑轨和第五滑块均等距设置有多组。
10.作为优选,第二电动推杆和第一电动推杆均设置有两组。
11.作为优选,第二限位块和第一限位框下表面均设置有多组钢针。
12.作为优选,第七电动推杆、第八电动推杆、第六支撑架、第九电动推杆、第十电动推杆和第七支撑架均设置有六组。
13.作为优选,多组第三限位块、多组第四限位块和多组第五限位块从俯视观测形成网格间隙。
14.有益效果为:一、为解决现有装置对石漠化土地进行治理时,由于土工布相对柔软,导致铺设过程中土工布会出现起皱现象,同时在将营养土夯实的过程中,营养土层边缘会向外侧延伸,使营养土层超出土工布,同时土地中含有尖锐的石块,夯实过程中尖锐石块会划破土工布,大大降低结构稳定性,此外,现有装置铺设土工格室时,只能将一种特定规格的土工格室充分展开,同时现有装置将土工格室展开后直接铺设至营养土层上方,在弹性的作用下土工格室出现回弹现象,导致部分格室变小,严重影响后续种植工序的问题;二、设计了营养土铺设组件,夯实组件和土工格室铺设组件;准备工作时,将装置放置于平整地面,通过缆绳将第一固定架和第二固定架连接外置动力装置,在四组车轮的配合下,外资动力装置可拉动本装置移动,第一支撑架上的多组第一配重块可使装置运动过程中保持平稳,工具盒可收纳工人使用的工具,然后装置运动至待铺设土工格室的土地旁,接通电源,操控底架上的控制屏控制装置开始运作,然后人工将土工布固定至营养土铺设组件中,然后将适量营养土倒入至土工布上方,此过程中,营养土铺设组件使土工布保持平整,并使土工布四周向上弯折九十度,将营养土包覆,提高稳定性,然后营养土将地面上层土壤中的尖锐石块去除,再将土工布和营养土一同运输至地面,避免石头划破土工布,然后装置移动一定距离,使夯实组件位于营养土上方,然后夯实组件将营养土夯实,此时土工布的边缘在弹力作用下复位,即土工布周围均超过营养土层,可提高稳定性,然后人工将土
工格室固定在土工格室铺设组件中,装置移动一定距离,使土工格室铺设组件位于营养土上方,然后土工格室铺设组件根据土工格室的纵向格数对其进行拉直限位,使土工格室充分展开,并使每个格室呈现正方形,然后土工格室铺设组件根据土工格室的纵向格数对其进行定型操作,将格室的四个直角处规整,避免将土工格室铺设后出现回弹现象,然后土工格室铺设组件将土工格室铺设在营养土上方;三、本发明使用时实现了自动使土工布四周均超出营养土,同时避免营养土层下方土工布起皱,同时避免土工布被尖锐石块划破,大大提高稳定性,还实现了自动将不同规格的土工格室充分展开,同时自动将格室的四个直角处压平,避免将土工格室铺设后出现回弹现象。
附图说明
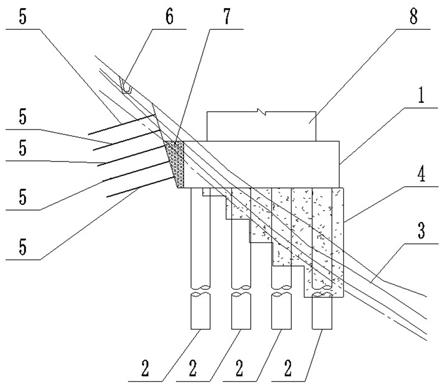
15.图1为本发明的第一种立体结构示意图;图2为本发明的第二种立体结构示意图;图3为本发明的侧视图;图4为本发明营养土铺设组件的立体结构示意图;图5为本发明营养土铺设组件部分结构的立体结构示意图;图6为本发明营养土铺设组件部分结构的俯视图;图7为本发明夯实组件的立体结构示意图;图8为本发明土工格室铺设组件的立体结构示意图;图9为本发明土工格室铺设组件的第一种部分立体结构示意图;图10为本发明土工格室铺设组件部分结构的俯视图;图11为本发明土工格室铺设组件的第二种部分立体结构示意图;图12为本发明土工格室铺设组件的第三种部分立体结构示意图;图13为本发明土工格室铺设组件部分结构的仰视图;图14为本发明第一限位机构的立体结构示意图;图15为本发明第一限位机构部分结构的立体结构示意图。
16.图中零部件名称及序号:1_底架,2_控制屏,3_车轮,4_工具盒,5_第一固定架,6_第二固定架,7_第一支撑架,8_第一配重块,201_第一电机,202_第一花键轴,203_第一滑块,204_第一电动滑轨,205_第一锥齿轮,206_第二锥齿轮,207_第一丝杆,208_第二滑块,209_第一导轨块,2010_第一联动块,2011_第二联动块,2012_第二支撑架,2013_第二电动推杆,2014_第一限位块,2015_第一电动推杆,2016_第二限位块,2017_第一限位框,2018_第一限位杆,2019_第一弹簧,2020_第一电动夹具,2021_第二限位杆,2022_第二弹簧,2023_第二电动夹具,301_第一传动轮,302_第二传动轮,303_第一传动杆,304_第三联动块,305_第一拨杆,306_第一滑槽块,307_第一推杆,308_第一滑套块,309_第一压板,3010_第三支撑架,401_第三传动轮,402_第四传动轮,403_第二花键轴,404_第三滑块,405_第二电动滑轨,406_第三锥齿轮,407_第四锥齿轮,408_第二丝杆,409_第四滑块,4010_第二导轨块,4011_第一联动架,4012_第三导轨块,4013_第四支撑架,4014_第四导轨块,4015_第三电动推杆,4016_第四电动推杆,4017_第五电动推杆,4018_第六电动推杆,4020_第二限位机构,4021_第五支撑架,4022_第三限位块,4023_第七电动推杆,4024_第八电动推杆,
4025_第六支撑架,4026_第四限位块,4027_第九电动推杆,4028_第十电动推杆,4029_第七支撑架,4030_第五限位块,401901_第一滑杆,401902_第二联动架,401903_第十一电动推杆,401904_第一联动杆,401905_第三限位杆,401906_第四限位杆,401907_第三电动滑轨,401908_第五滑块。
具体实施方式
17.下面结合附图详细说明本发明的优选技术方案。
18.实施例一种可适应多种格数的土地治理用土工格室铺设装置,如图1
‑
3所示,包括有底架1、控制屏2、车轮3、工具盒4、第一固定架5、第二固定架6、第一支撑架7、第一配重块8、营养土铺设组件、夯实组件和土工格室铺设组件;底架1与控制屏2进行固接;底架1与四组车轮3进行固接;底架1与工具盒4进行固接;底架1与第一固定架5进行固接;底架1与第二固定架6进行固接;底架1与第一支撑架7进行固接;底架1与可将土工布和营养土铺设至地面的营养土铺设组件进行固接;底架1通过连接块与营养土铺设组件进行转动连接;底架1与可将营养土夯实的夯实组件进行固接;底架1与可将土工格室铺设在营养土层上方的土工格室铺设组件进行固接;第一支撑架7与多组第一配重块8相接触;营养土铺设组件与夯实组件进行固接;夯实组件与土工格室铺设组件进行固接。
19.工作原理:准备工作时,将装置放置于平整地面,通过缆绳将第一固定架5和第二固定架6连接外置动力装置,在四组车轮3的配合下,外资动力装置可拉动本装置移动,第一支撑架7上的多组第一配重块8可使装置运动过程中保持平稳,工具盒4可收纳工人使用的工具,然后装置运动至待铺设土工格室的土地旁,接通电源,操控底架1上的控制屏2控制装置开始运作,然后人工将土工布固定至营养土铺设组件中,然后将适量营养土倒入至土工布上方,此过程中,营养土铺设组件使土工布保持平整,并使土工布四周向上弯折九十度,将营养土包覆,提高稳定性,然后营养土铺设组件将地面上层土壤中的尖锐石块去除,再将土工布和营养土一同运输至地面,避免石头划破土工布,然后装置移动一定距离,使夯实组件位于营养土上方,然后夯实组件将营养土夯实,此时土工布的边缘在弹力作用下复位,即土工布周围均超过营养土层,可提高稳定性,然后人工将土工格室固定在土工格室铺设组件中,装置移动一定距离,使土工格室铺设组件位于营养土上方,然后土工格室铺设组件根据土工格室的纵向格数对其进行拉直限位,使土工格室充分展开,并使每个格室呈现正方形,然后土工格室铺设组件根据土工格室的纵向格数对其进行定型操作,将格室的四个直角处规整,避免将土工格室铺设后出现回弹现象,然后土工格室铺设组件将土工格室铺设在营养土上方,本发明使用时实现了自动使土工布四周均超出营养土,同时避免营养土层下方土工布起皱,同时避免土工布被尖锐石块划破,大大提高稳定性,还实现了自动将不同规格的土工格室充分展开,同时自动将格室的四个直角处压平,避免将土工格室铺设后出现回弹现象。
20.如图4
‑
6所示,营养土铺设组件包括有第一电机201、第一花键轴202、第一滑块203、第一电动滑轨204、第一锥齿轮205、第二锥齿轮206、第一丝杆207、第二滑块208、第一导轨块209、第一联动块2010、第二联动块2011、第二支撑架2012、第二电动推杆2013、第一限位块2014、第一电动推杆2015、第二限位块2016、第一限位框2017、第一限位杆2018、第一
弹簧2019、第一电动夹具2020、第二限位杆2021、第二弹簧2022和第二电动夹具2023;第一电机201输出端与第一花键轴202进行固接;第一电机201与底架1进行固接;第一花键轴202的轴杆与第一滑块203进行转动连接;第一花键轴202的轴杆与第一锥齿轮205进行固接;第一花键轴202的轴套通过连接块与底架1进行转动连接;第一花键轴202的轴套与夯实组件进行固接;第一滑块203与第一电动滑轨204进行滑动连接;第一电动滑轨204与底架1进行固接;第一锥齿轮205一侧设置有第二锥齿轮206;第二锥齿轮206内部与第一丝杆207进行固接;第一丝杆207外表面与第二滑块208进行旋接;第一丝杆207外表面与第一导轨块209进行转动连接;第二滑块208与第一导轨块209进行滑动连接;第二滑块208与第一联动块2010进行固接;第一导轨块209与第二支撑架2012进行固接;第一联动块2010与第二联动块2011进行固接;第二联动块2011与第二电动推杆2013进行固接;第二联动块2011与第一限位块2014进行固接;第二联动块2011与第一限位框2017进行固接;第二支撑架2012与底架1进行固接;第二电动推杆2013与第一限位块2014进行固接;第一限位块2014与第一限位框2017进行滑动连接;第一电动推杆2015与第二限位块2016进行固接;第二限位块2016与第一限位框2017进行滑动连接;第一限位框2017与两组第一限位杆2018进行固接;第一限位框2017与两组第一弹簧2019进行固接;第一限位框2017与两组第二限位杆2021进行固接;第一限位框2017与两组第二弹簧2022进行固接;两组第一限位杆2018均与第一电动夹具2020进行滑动连接;两组第一弹簧2019均与第一电动夹具2020进行固接;两组第二限位杆2021均与第二电动夹具2023进行滑动连接;两组第二弹簧2022均与第二电动夹具2023进行固接。
21.首先,将一块土工布的两端分别固定于第一电动夹具2020和第二电动夹具2023中,土工布的另两端均超出第一限位框2017,此时土工布处于紧绷状态,然后将营养土倒入至土工布上方,营养土将土工布向下压,使得土工布两端分别带动第一电动夹具2020和第二电动夹具2023运动,第一电动夹具2020在两组第一限位杆2018上滑动,第一电动夹具2020对两组第一弹簧2019进行压缩,第二电动夹具2023在两组第二限位杆2021上滑动,第二电动夹具2023对两组第二弹簧2022进行压缩,从而使土工布四周向上弯折九十度,将营养土包覆,并且土工布中部始终处于紧绷状态,然后第一电机201带动第一花键轴202传动第一锥齿轮205转动,第一花键轴202带动夯实组件运作,然后第一电动滑轨204带动第一滑块203传动第一花键轴202伸长,使第一花键轴202带动第一锥齿轮205啮合第二锥齿轮206,然后第一锥齿轮205带动第二锥齿轮206传动第一丝杆207转动,第一丝杆207带动第二滑块208运动,第二滑块208在与第二支撑架2012相连的第一导轨块209上向下滑动,第二滑块208带动第一联动块2010传动第二联动块2011向下运动,第二联动块2011带动与其相关联的组件运动,使营养土和土工布向下运动,第一限位块2014和第二限位块2016向下运动至地面,同时第一限位块2014和第二限位块2016下表面的钢针插入至疏松的土地上层,然后两组第二电动推杆2013同时推动第一限位块2014运动,两组第一电动推杆2015同时推动第二限位块2016运动,使第一限位块2014和第二限位块2016远离第一限位框2017底部,同时将土地上层土壤中尖锐的石块去除,然后第一电动夹具2020和第二电动夹具2023停止固定土工布,营养土和土工布下落至土地上方,此时土工布的边缘在弹力作用下复位,即土工布周围均超过营养土层,然后第一电机201带动第一花键轴202进行反转,使第二滑块208带动与其相关联的组件运动回原位,然后第一锥齿轮205停止啮合第二锥齿轮206,使用时实现
了自动使土工布四周均超出营养土,同时避免营养土层下方土工布起皱,同时避免土工布被尖锐石块划破,大大提高稳定性。
22.如图7所示,夯实组件包括有第一传动轮301、第二传动轮302、第一传动杆303、第三联动块304、第一拨杆305、第一滑槽块306、第一推杆307、第一滑套块308、第一压板309和第三支撑架3010;第一传动轮301通过皮带与第二传动轮302进行传动连接;第二传动轮302内部与第一传动杆303进行固接;第一传动杆303与第三联动块304进行固接;第一传动杆303外表面与第三支撑架3010进行转动连接;第一传动杆303外表面与第一花键轴202进行固接;第一传动杆303外表面与土工格室铺设组件进行固接;第三联动块304与第一拨杆305进行固接;第一拨杆305与第一滑槽块306进行传动连接;第一滑槽块306与第一推杆307进行固接;第一推杆307与第一滑套块308进行滑动连接;第一推杆307与第一压板309进行固接;第一滑套块308与第三支撑架3010进行固接;第三支撑架3010与底架1进行固接。
23.当营养土铺设组件将营养土铺设完成后,装置移动一定距离,使第一压板309运动至营养土层正上方,然后营养土铺设组件带动第一传动轮301传动第二传动轮302转动,第二传动轮302带动第一传动杆303传动第三联动块304进行圆周运动,第一传动杆303带动土工格室铺设组件运作,第一传动杆303在第三支撑架3010上转动,第三联动块304带动第一拨杆305进行圆周运动,第一拨杆305带动第一滑槽块306传动第一推杆307在第一滑套块308内进行上下往复滑动,使第一推杆307带动第一压板309进行上下往复运动,从而使第一压板309将营养土夯实,使用时实现了自动将营养土夯实。
24.如图8
‑
13所示,土工格室铺设组件包括有第三传动轮401、第四传动轮402、第二花键轴403、第三滑块404、第二电动滑轨405、第三锥齿轮406、第四锥齿轮407、第二丝杆408、第四滑块409、第二导轨块4010、第一联动架4011、第三导轨块4012、第四支撑架4013、第四导轨块4014、第三电动推杆4015、第四电动推杆4016、第五电动推杆4017、第六电动推杆4018、第一限位机构、第二限位机构4020、第五支撑架4021、第三限位块4022、第七电动推杆4023、第八电动推杆4024、第六支撑架4025、第四限位块4026、第九电动推杆4027、第十电动推杆4028、第七支撑架4029和第五限位块4030;第三传动轮401通过皮带与第四传动轮402进行传动连接;第三传动轮401内部与第一传动杆303进行固接;第四传动轮402内部与第二花键轴403进行固接;第二花键轴403的轴套与第四支撑架4013进行转动连接;第二花键轴403的轴杆与第三滑块404进行转动连接;第二花键轴403的轴杆与第三锥齿轮406进行固接;第三滑块404与第二电动滑轨405进行滑动连接;第二电动滑轨405与第四支撑架4013进行固接;第三锥齿轮406一侧设置有第四锥齿轮407;第四锥齿轮407内部与第二丝杆408进行固接;第二丝杆408外表面与第四滑块409进行旋接;第二丝杆408外表面与第二导轨块4010进行固接;第四滑块409与第二导轨块4010进行滑动连接;第四滑块409与第一联动架4011进行固接;第四滑块409与第四支撑架4013进行固接;第一联动架4011与第三导轨块4012进行固接;第一联动架4011与第四导轨块4014进行固接;第三导轨块4012通过连接块与第三电动推杆4015进行固接;第三导轨块4012通过连接块与第四电动推杆4016进行固接;第三导轨块4012与第一限位机构进行滑动连接;第三导轨块4012与第二限位机构4020进行滑动连接;第四支撑架4013与底架1进行固接;第四导轨块4014通过连接块与第五电动推杆4017进行固接;第四导轨块4014通过连接块与第六电动推杆4018进行固接;第四导轨块4014与第一限位机构进行滑动连接;第四导轨块4014与第二限位机构4020进行滑动连
接;第三电动推杆4015与第一限位机构进行固接;第四电动推杆4016与第二限位机构4020进行固接;第五电动推杆4017与第一限位机构进行固接;第六电动推杆4018与第二限位机构4020进行固接;第六电动推杆4018上方设置有第五支撑架4021;第五支撑架4021与多组第三限位块4022进行固接;第五支撑架4021与第七电动推杆4023进行固接;第五支撑架4021与第八电动推杆4024进行固接;第五支撑架4021与第九电动推杆4027进行固接;第五支撑架4021与第十电动推杆4028进行固接;第五支撑架4021与底架1进行固接;第七电动推杆4023与第六支撑架4025进行固接;第八电动推杆4024与第六支撑架4025进行固接;第六支撑架4025与多组第四限位块4026进行固接;第九电动推杆4027与第七支撑架4029进行固接;第十电动推杆4028与第七支撑架4029进行固接;第七支撑架4029与多组第五限位块4030进行固接。
25.首先,将土工格室两侧逐格固定在第一限位机构和第二限位机构4020中,当夯实组件将营养土夯实后,装置移动一定距离,使土工格室位于营养土正上方,然后第三电动推杆4015和第五电动推杆4017同时推动第一限位机构运动,第四电动推杆4016和第六电动推杆4018同时推动第二限位机构4020运动,使第一限位机构和第二限位机构4020进行相离运动,第三导轨块4012和第四导轨块4014上设置有刻度线,可根据土工格室的纵向格数,使第一限位机构和第二限位机构4020运动至指定位置,从而将土工格室充分展开,并使格室呈现正方形,然后夯实组件带动第三传动轮401传动第四传动轮402转动,第四传动轮402带动第二花键轴403传动第三锥齿轮406转动,然后第二电动滑轨405带动第三滑块404传动第二花键轴403伸长,使第二花键轴403带动第三锥齿轮406啮合第四锥齿轮407,然后第三锥齿轮406带动第四锥齿轮407传动第二丝杆408转动,第二丝杆408带动第四滑块409向上运动,第四滑块409在第四支撑架4013上的第二导轨块4010上向上滑动,第四滑块409带动第一联动架4011向上运动,第一联动架4011带动与其相关联的组件运动,使第一限位机构和第二限位机构4020同时带动充分展开的土工格室向上运动,同时,第五支撑架4021上的第七电动推杆4023和第八电动推杆4024同时带动第六支撑架4025向下运动,第六支撑架4025带动多组第四限位块4026向下运动,第九电动推杆4027和第十电动推杆4028同时带动第七支撑架4029向下运动,第七支撑架4029带动多组第五限位块4030向下运动,此时,根据土工格室的纵向格数,决定内侧两组第七支撑架4029、内侧两组第六支撑架4025、中部两组第七支撑架4029、中部两组第六支撑架4025、外侧两组第七支撑架4029和外侧两组第六支撑架4025向下运动,从而使多组第四限位块4026和多组第五限位块4030向下运动与多组第三限位块4022平齐,进而使多组第三限位块4022、多组第四限位块4026和多组第五限位块4030相互配合形成网格凹槽,然后充分展开的土工格室向上运动套入至网格凹槽中,网格凹槽对格室进行限位,从而将格室四个直角进行规整,避免将土工格室铺设后出现回弹现象,然后夯实组件带动第三传动轮401进行反转,使土工格室向下运动至营养土层上方,然后第一限位机构和第二限位机构4020将土工格室铺设在营养土层上方,使用时实现了自动将不同规格的土工格室充分展开,同时自动将格室的四个直角处压平,避免将土工格室铺设后出现回弹现象。
26.如图14
‑
15所示,第一限位机构包括有第一滑杆401901、第二联动架401902、第十一电动推杆401903、第一联动杆401904、第三限位杆401905、第四限位杆401906、第三电动滑轨401907和第五滑块401908;第一滑杆401901与两组第二联动架401902进行固接;第一
滑杆401901与第四限位杆401906进行固接;两组第二联动架401902分别与两组第十一电动推杆401903进行固接;两组第十一电动推杆401903均与第一联动杆401904进行固接;第一联动杆401904与多组第三限位杆401905进行固接;多组第三限位杆401905均与第一滑杆401901进行滑动连接;第四限位杆401906与第三电动滑轨401907进行固接;第三电动滑轨401907与第五滑块401908进行滑动连接;第四限位杆401906、第三电动滑轨401907和第五滑块401908均等距设置有多组。
27.首先,将土工格室一侧的格室依次从下向上套入至多组第四限位杆401906中,然后两组第二联动架401902上的两组第十一电动推杆401903同时带动第一联动杆401904运动,第一联动杆401904带动多组第三限位杆401905运动,使多组第三限位杆401905分别插入至多组第四限位杆401906下部,从而对土工格室进行固定,多组第四限位杆401906的间距与充分展开的格室的对角距离相等,从而使土工格室横向处于拉直状态,然后第三电动推杆4015和第五电动推杆4017同时推动第一滑杆401901运动,在第一电动夹具2020的配合下,将土工格室纵向拉直,从而将土工格室充分展开,当土工格室规整后,土工格室向下运动至营养土层上方,然后多组第三限位杆401905运动回原位,多组第四限位杆401906同时向上运动脱离土工格室,同时多组第三电动滑轨401907带动多组第五滑块401908向下运动,使多组第五滑块401908对土工格室进行限位,从而使紧绷的土工格室顺利脱离多组第四限位杆401906,使用时实现了配合第一电动夹具2020将土工格室充分展开,并将土工格室铺设至营养土层上方。
28.第二电动推杆2013和第一电动推杆2015均设置有两组。
29.可使第一限位块2014和第二限位块2016运动过程中保持稳定。
30.第二限位块2016和第一限位框2017下表面均设置有多组钢针。
31.可将土地上层疏松土壤中的尖锐石块去除。
32.第七电动推杆4023、第八电动推杆4024、第六支撑架4025、第九电动推杆4027、第十电动推杆4028和第七支撑架4029均设置有六组。
33.可适应纵向格数不同的土工格室进行规整操作。
34.多组第三限位块4022、多组第四限位块4026和多组第五限位块4030从俯视观测形成网格间隙。
35.可使土工格室向上运动时插入至网格间隙中,从而将格室四个直角进行规整。
36.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。