1.本发明属于纺织机械技术领域,具体涉及一种具有纱线张力调控的横机纱嘴装置及张力调控方法。
背景技术:
2.电脑横机上的纱嘴用于引导纱线进入编织,纱线先经过纱嘴上的穿纱筒,再穿入纱嘴口进行编织。纱嘴在编织一行后,会先离开编织区域,再由机头控制回头编织下一行。现有横机穿纱一般从机器的一边进入,在回头编织的过程中,纱嘴处的余线不能及时回收,从而使纱线张力变大,造成织片边缘针目上下行大小不一。张力不同会使线圈大小不同,从而使织片边缘产生1
‑
2英寸的结构不匀,即花目。现有电脑横机在机器侧面配备了张力装置来进行余线回收,但这些张力装置距离纱嘴较远,机头回转的速度过快,张力装置反应不够及时,纱线张力难以进行及时的调控。
技术实现要素:
3.本发明要解决的技术问题是提供一种具有纱线张力调控的横机纱嘴装置及张力调控方法,解决机头回转时纱线张力难以进行及时调控的问题,纱嘴能及时调控纱线张力,编织出的织片边缘结构均匀平整、瑕疵少。
4.为了解决上述技术问题,本发明采用的一种技术方案是:所述纱线张力调控的横机纱嘴装置,包括机头连接件,机头连接件用于与机头连接在一起,使横机纱嘴装置在机头的带动下左右移动;所述机头连接件安装在乌斯座上,在所述乌斯座上固定纱嘴滑杆,纱嘴滑杆的下部与纱嘴连接;在所述纱嘴滑杆上滑动设置固定架,在所述固定架上安装穿纱筒和信号接收器,信号接收器用于接收固定架进行升降运动的控制信号;所述机头连接件上设有接触式传感器,接触式传感器的信号输出端与机头控制系统连接,接触式传感器用于输出机头和纱嘴组件接触信号;所述机头控制系统包括信号释放器,信号释放器将固定架上升或下降指令传输至信号接收器,信号接收器接收上升或下降指令后,固定架在竖向滑槽内进行上升或下降运动。
5.进一步地,所述乌斯座与弹片固定在一起。
6.进一步地,所述固定架通过设置在纱嘴滑杆上的竖向滑槽和滑块滑动配合。
7.本发明还提供一种横机纱嘴装置的纱线张力调控方法,包括以下步骤:
8.(1)机头与机头连接件连接在一起,接触式传感器向机头控制系统输出机头和纱嘴组件的接触信号;
9.(2)机头带动纱嘴装置编织一行后,将纱嘴装置带出编织区域到达纱嘴停放点,机头与纱嘴装置分离,此时纱嘴装置停止运动;
10.(3)在机头回转时,机头再次与纱嘴装置连接带动纱嘴装置重新进入编织区域;接触式传感器将机头和纱嘴装置的接触信号反馈到机头控制系统,由信号释放器发出固定架上升指令,固定架上的信号接收器接收到信号释放器的上升指令后,固定架带动穿纱筒沿
竖向滑槽做上升运动,使余线具备一定张力;
11.(4)在机头回转进入编织区域后,固定架沿竖向滑槽开始进行下降运动,使余线量均匀分布到参与编织的织针上。
12.进一步地,所述固定降的上升高度不超过最大升降空间。
13.进一步地,所述固定架的上升高度其中x1为编织完一行机头回转前穿纱筒距纱嘴口的直线长度加上余线量的数值,也即机头回头后穿纱筒上升后穿纱筒距纱嘴口的直线长度;x2为穿纱筒距纱嘴口的水平长度,h0为纱嘴筒的原始高度;所述穿纱筒上升的速度v1=h/t,t=x4/v0,其中,x4为纱嘴停放点距织片边缘的水平距离,v0为机器运行速度。
14.进一步地,所述固定降下降的速度=h/参与编织的织针总数;当一行结束编织后,纱嘴固定件恰好能回到初始位置。
15.本发明的优点具体如下:
16.本发明通过固定架做升降运动的同时,穿纱筒跟随着上下运动,机头回转时产生的多余纱线能够及时被穿纱筒牵拉回收,使织片边缘结构均匀,线圈大小一致。本发明能够实现在机头回转时,纱嘴能及时调控纱线张力,编织出的织片边缘结构均匀平整、瑕疵少。
附图说明
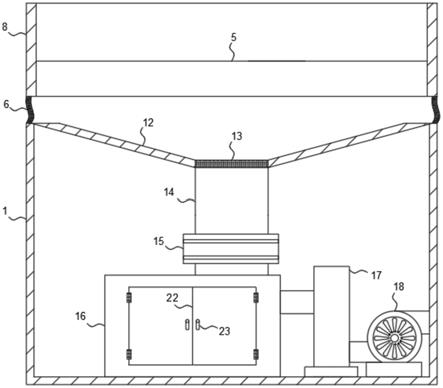
17.图1为本发明所述横机纱嘴装置的正面结构图。
18.图2为所述固定架与纱嘴滑杆的连接示意图。
19.图3为所述滑块的结构示意图。
20.图4为所述机头连接件的结构示意图。
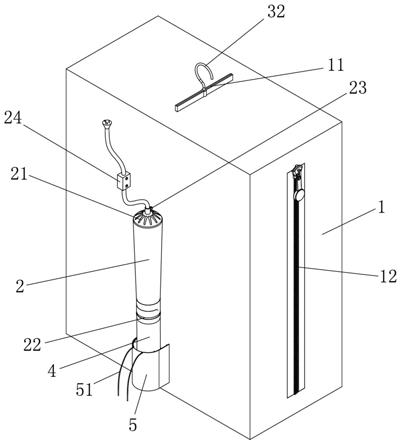
21.图5为穿纱筒的控制方式示意图。
22.图6为穿纱筒的升降算法示意图。
23.附图标记说明:1
‑
机头连接件、2
‑
乌斯座、3
‑
弹片、4
‑
纱嘴滑杆、5
‑
固定架、6
‑
穿纱筒、7
‑
信号接收器、8
‑
竖向滑槽、9
‑
纱嘴、10
‑
纱嘴口、11
‑
接触式传感器、12
‑
滑块。
具体实施方式
24.为了使本发明的上述目的、特征和优点能够更加明显易懂,下面结合具体附图对本发明的具体实施方式作进一步的说明。
25.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施例,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
26.实施例1:
27.本实施例所述具有纱线张力调控的横机纱嘴装置,以龙星e14双针床电脑横机的纱嘴结构为例,所述横机纱嘴装置如图1所示,包括机头连接件1,机头连接件1用于与机头连接在一起,使横机纱嘴装置在机头的带动下左右移动;所述机头连接件1安装在乌斯座2上,乌斯座2与弹片3通过螺丝固定在一起;在所述乌斯座2上通过左右两颗螺丝固定纱嘴滑杆4,纱嘴滑杆4的下部通过螺丝与纱嘴9连接;在所述纱嘴滑杆4上滑动设置固定架5,如图2所示,所述固定架5通过设置在纱嘴滑杆4上的竖向滑槽8和滑块12滑动配合;在所述固定架
5上安装有信号接收器7,信号接收器7用于接收固定架5进行升降运动的控制信号;在所述固定架5上安装穿纱筒6,纱线从横机侧边穿入先经过穿纱筒6,再传送至纱嘴9上的纱嘴口10中进入编织,固定架5在竖向滑槽8内做升降运动时,穿纱筒6随之升降,实现纱线张力调控;如图3所示,所述机头连接件1上设有接触式传感器11;如图4所示,所述接触式传感器11的信号输出端与机头控制系统连接,接触式传感器11用于输出机头和纱嘴组件接触信号;所述机头控制系统包括信号释放器,信号释放器将固定架上升或下降指令传输至信号接收器,信号接收器接收上升或下降指令后,固定架在竖向滑槽内进行上升或下降运动。
28.实施例2:
29.本实施例所述横机纱嘴装置的纱线张力调控方法,包括以下步骤:
30.(1)机头与机头连接件连接在一起,接触式传感器向机头控制系统输出机头和纱嘴组件的接触信号;
31.(2)机头带动纱嘴装置编织一行后,将纱嘴装置带出编织区域到达纱嘴停放点,机头与纱嘴装置分离,此时纱嘴装置停止运动;
32.(3)在机头回转时,机头再次与纱嘴装置连接带动纱嘴装置重新进入编织区域;接触式传感器将机头和纱嘴装置的接触信号反馈到机头控制系统,由信号释放器发出固定架上升指令,固定架上的信号接收器接收到信号释放器的上升指令后,固定架带动穿纱筒沿竖向滑槽做上升运动,使余线具备一定张力;
33.因为各个纱嘴之间的空间有限,如果固定架升降的距离太大,则可能会在编织的过程中出现纱嘴碰撞的问题,因此纱嘴需要测量最大升降空间h,那么纱嘴停放点和余线量就不能过大,纱嘴升降空间就不能超过最大升降空间h;
34.纱嘴从停放点运行到织片边缘所用的时间为t,则在时间t内,固定架需要上升高度h不能超过最大升降空间h;
35.固定架的上升高度其中x1为编织完一行机头回转前穿纱筒距纱嘴口的直线长度加上余线量的数值,也即机头回头后穿纱筒上升后穿纱筒距纱嘴口的直线长度;x2为穿纱筒距纱嘴口的水平长度,h0为纱嘴筒的原始高度;所述穿纱筒上升的速度v1=h/t,t=x4/v0,其中,x4为纱嘴停放点距织片边缘的水平距离,v0为机器运行速度;
36.(4)为了让线圈大小保持一致,织片表面平整美观,在机头回转进入编织区域后,余线量可均匀分布到参与编织的织针上。在机头控制系统回转进入编织区域接收到织针开始运动的信号时,固定架沿竖向滑槽开始进行下降运动,下降的速度依据固定架上升高度h和参与编织的指针总数来设定,即下降速度=h/参与编织的织针总数;当一行结束编织后,纱嘴固定件恰好能回到初始位置。
37.实施例3:
38.本实施例所述横机纱嘴装置的纱线张力调控方法,包括以下步骤:
39.(1)选用机器为龙星双针床电脑横机,具体参数为:机号e14;最高速度1.4m/s;幅宽52英寸;如图5所示,根据纱嘴各部件尺寸可知,穿纱筒距纱嘴口的直线长度x1为8cm、穿纱筒距纱嘴口的水平长度x2为2cm、纱嘴筒的原始高度h0为8cm;
40.(2)编织一行后,纱嘴到达纱嘴停放点c,纱嘴停放点可进行人为设定,假定同根导轨上纱嘴停放点c距织片边缘e的水平距离x4为2cm、余线量x3为2.1cm;则,在机头回转重新进入编织区域后,穿纱筒进行上升,余线量x3会增加到x1上,上升后的x1变化为10.1cm;
41.假设机器以速度v0=10cm/s运行,则纱嘴从停放点c运行到织片边缘e所用的时间t=x4/v0为0.2s;则穿纱筒需要上升的高度h=1.9cm。最后可得知在时间t内,穿纱筒上升的速度v1=h/t=9.5cm/s。根据该计算方式,在进行织片花型设计时,根据纱嘴停放点的位置、机器运行速度和纱嘴高度这些数据,可直接输出穿纱筒上升的速度v1和运行时间t;
42.(3)为了让线圈大小保持一致,织片表面平整美观,在机头回转进入编织区域后,余线量可均匀分布到参与编织的织针上;固定架在竖向滑槽内开始进行下降运动,下降的速度依据固定架上升高度和参与编织的指针总数来设定,下降速度=h/参与编织的织针总数;当固定架上升高度为1.9cm,假定参与编织的织针总数为50针,则固定架下降的速度为0.038cm/s,当一行结束编织后,纱嘴固定件恰好能回到初始位置。
43.以上对本技术所提供的一种具有纱线张力调控的横机纱嘴装置进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。