1.本技术提出一种缝纫机的送布牙驱动机构及送布牙定位方法,具体涉及缝纫机制造技术领域。
背景技术:
2.在缝纫机的驱动机构中,缝纫机的机头上安装有主电机,主电机连接的输出主轴,输出主轴上安装固定有偏心轮,主电机运转以偏心轮转动驱动送布连杆和抬牙连杆运动。送布连杆经摆动座组件带动送布轴按一定角度转动,抬牙连杆经抬牙曲柄带动抬牙轴按一定角度摆动;送布连杆及送布轴的摆动驱动送布牙架摆动从而为送布牙产生前后运动;抬牙连杆及抬牙轴摆动带动抬牙轴上的抬牙叉摆动从而使得送布牙产生上下运动,前后运动和上下运动组合形成了送布牙的送布动作。
3.针对针距控制的摆动座,许多企业提出了实现送布针距的智能化控制技术方案。有专利方案提出具有送布轴驱动源、连接曲柄、送布轴、送布牙架和送布牙,其特征在于,还具有摆动杆,送布轴驱动源具有输出轴,输出轴上安装有摆动杆,摆动杆铰链连接曲柄,连接曲柄固定在送布轴,送布轴动连接送布牙架,送布牙架上固定有送布牙。实际上,该方案是利用送布轴驱动源驱动摆动杆来替代原有缝纫机的送布连杆,对针距调节机构实施针距调节以及对零位定位机构实施定位送布牙零点位置,起到了积极的针距调节技术效果。然而,对于抬牙连杆的运动还是停留在现有技术上,使得送布牙的上下送布动作无法达到智能控制水平。
4.另外,现有的针距调节机构包括位于缝纫机机壳外部的标盘按钮、与缝纫机机壳螺纹连接的标盘螺柱、送料调节器、以及倒送料连杆,标盘按钮与标盘螺柱的前端相固定,标盘螺柱的后端与送料调节器的前端面相抵接,送料调节器的后端与倒送料连杆的上端相铰接,倒送料连杆的下端作用于连接在缝纫机主轴和送料轴之间的送料传动组件。需要调节针距时,操作人员手动转动标盘按钮,则标盘按钮带动标盘螺柱,标盘螺柱在转动的同时会前移或后移,进而通过送料调节器和倒送料连杆改变送料传动组件中与倒送料连杆连接的该组件的位置,从而改变主轴带动送料轴摆动的摆动幅度,进而改变牙架前后移动的行程,实现针距调节。但是,上述针距调节机构存在下述缺陷:其为手动调节,故操作比较麻烦,且较被动,也不能在缝纫过程中自动调节针距。
技术实现要素:
5.针对现有技术中的不足,本技术要解决的技术问题在于提供了一种缝纫机的送布牙定位方法,具有牙架座、牙架、送布轴、抬牙叉形曲柄、抬牙轴、送布牙和控制系统,其特征在于,还具有抬牙电机和送布电机;
6.步骤一,抬牙电机和送布电机具有的光栅确定驱动开始位置即为零点启动位置;
7.步骤二,牙架座套设在送布轴上,抬牙叉形曲柄套设在抬牙轴上,牙架及送布牙处于可自由活动的状态;
8.步骤三,将送布牙移到针板内部具有的前后送布行程的中心位置上,此时,将牙架座固死在送布轴上,完成送布电机的零点启动位置定位,以送布牙的前后送布中心位置定位送布电机的零点启动位置;
9.步骤四,送布牙具有的牙尖最高点移到与针板的上平面齐平位置上,此时,将抬牙叉形曲柄固死在抬牙电机上,完成抬牙电机的零点启动位置定位,以送布牙的上下送布位置定位抬牙电机的零点启动位置。
10.优选地,所述抬牙电机和送布电机在控制系统的控制下定位零点启动位置,由控制系统确定。
11.优选地,所述步骤三,送布牙具有的牙尖最高点移到与针板的上平面齐平位置上,此时,将抬牙叉形曲柄固死在抬牙电机上,完成抬牙电机的零点启动位置定位,以送布牙的上下送布位置定位抬牙电机的零点启动位置;
12.步骤四,将送布牙移到针板内部具有的前后送布行程的中心位置上,此时,将牙架座固死在送布轴上,完成送布电机的零点启动位置定位,以送布牙的前后送布中心位置定位送布电机的零点启动位置。
13.优选地,所述送布牙定位方法是在缝纫机出厂前设置,具有:定位送布电机和抬牙电机的零点启动位置,定位送布牙的前后送布中心位置和上下送布位置。
14.优选地,所述前后送布行程是指送布牙在针板内部的运行最大行程,送布牙心位置是指上述行程的中心位置。
15.优选地,所述牙尖最高点移到与针板的上平面齐平位置。
16.优选地,缝纫机机针的针尖与所述牙尖最高点、上平面齐平,呈一直线状态。
17.优选地,所述送布牙驱动机构具有抬牙电机和送布电机,所述抬牙电机和送布电机执行送布牙定位的送布牙定位方法。
18.相对于现有技术,本技术的抬牙电机和送布电机具有的光栅确定驱动开始位置即为零点启动位置;再通过牙架座套设在送布轴上,抬牙叉形曲柄套设在抬牙轴上,牙架及送布牙处于可自由活动的状态;又将送布牙移到针板内部具有的前后送布行程的中心位置上,将牙架座固死在送布轴上,完成送布电机的零点启动位置定位,以送布牙的前后送布中心位置定位送布电机的零点启动位置;最后,送布牙具有的牙尖最高点移到与针板的上平面齐平位置上,将抬牙叉形曲柄固死在抬牙电机上,完成抬牙电机的零点启动位置定位,以送布牙的上下送布位置定位抬牙电机的零点启动位置。通过上述的送布电机和抬牙电机分别控制送布轴和抬牙轴,提高了送布牙所产生针距的角度,提高了送布牙的运行精度,缝纫机对送布牙的智能控制水平。
附图说明
19.图1显示的是一种缝纫机的送布牙驱动机构及送布牙定位方法示意图;
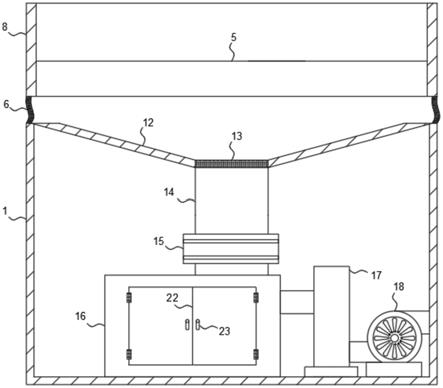
20.图2显示的是一种缝纫机的送布牙驱动机构及送布牙定位方法的底线驱动机构、上线驱动机构及旋梭驱动组件示意图;
21.图3显示的是一种缝纫机的送布牙驱动机构及送布牙定位方法的送布驱动组件示意图;
22.图4显示的是一种缝纫机的送布牙驱动机构及送布牙定位方法的剪线和抬压脚驱
动机构示意图;
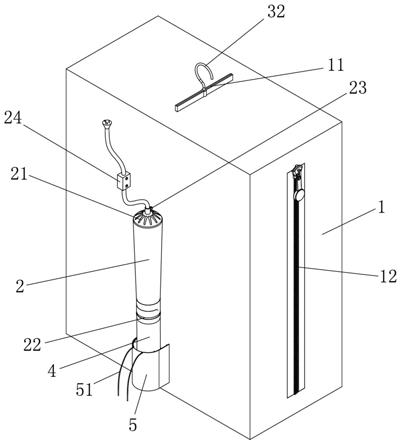
23.图5显示的是一种缝纫机的送布牙驱动机构及送布牙定位方法的剪线和抬压脚驱动机构另一示意图;
24.图6显示的是一种缝纫机的送布牙驱动机构及送布牙定位方法的抬牙轴和送布轴摆动角度示意图;
25.图7显示的是一种缝纫机的送布牙驱动机构及送布牙定位方法的送布牙和针板结构图。
26.标记:抬牙电机11,抬牙轴111,抬牙叉形曲柄112,送布电机21,送布轴211,牙架座212,牙架213,活动轴2131,送布牙214,旋梭电机31,下轴311,旋梭312,上轴电机41,上轴411,传动件412,前后送布行程2141,牙尖最高点2142,针杆413,风扇414,手轮415,连接杆416,针板51,上平面511,剪线和抬压脚电机61,剪线曲柄71,推动件711,剪线叉轮72,剪线杆721,回位杆722,剪线执行端73,抬压脚凸轮74,抬压脚凸轮抬升面741,空转圆弧面742,抬压脚顶杆75,抬压脚执行端76,基板81,反复来回摆运转角度91。
具体实施方式
27.下面结合附图1
‑
7对本技术的优选实施例进行详细阐述,以使本技术的优点和特征能更易于被本领域技术人员理解,从而对本技术的保护范围做出更为清楚明确的界定,这些实施方式仅用于说明本发明,而并非对本发明的限制。
28.本技术提出一种缝纫机的送布牙驱动机构及送布牙定位方法,缝纫机具有底线驱动机构、上线驱动机构、剪线和抬压脚驱动机构及控制系统。其中,底线驱动机构具有送布驱动组件和旋梭驱动组件,送布驱动组件主要有抬牙电机11、送布电机21、抬牙轴111、送布轴211和送布牙214等组成;旋梭驱动组件具有旋梭电机31、下轴311和旋梭312。送布驱动组件由抬牙电机11驱动抬牙轴111、送布电机21连接并驱动送布轴211间接实现送布牙214的送布动作;旋梭电机31连接并驱动下轴311实现与下轴311连接的旋梭312执行收线勾线动作,送布牙214的送布动作和旋梭312的收线勾线动作共同实现缝纫机的底线驱动机构底线出线功能。上线驱动机构具有上轴电机41、上轴411、传动件412和针杆413,上轴电机41连接并驱动上轴411实现上线驱动机构的带线穿针动作。上述的送布驱动组件、旋梭驱动组件以及上线驱动机构在缝纫机的控制系统控制下实现缝纫机的正常缝制工作,本技术打破了传统驱动机构由主轴电机通过竖轴传递动力到下轴的设计,以及上轴的凸轮和送布连杆、抬牙连杆、摆动座,由上述四个电机共同驱动实现了缝纫机的无油化工作。另外,缝纫机上下结构传动分开,不需要润滑油进行润滑,不需要匹配上轴的凸轮、上轴、竖轴以及下轴之间的锥度齿轮组可大幅降低了制造成本。
29.上述的抬牙电机11和送布电机21安装固定在基板81之下,并位于基板81的两侧,旋梭电机31安装固定在抬牙电机11和送布电机21之间。抬牙电机11、送布电机21和旋梭电机31安装在靠近在缝纫机的旋梭312一侧。
30.底线驱动机构主要体现在抬牙电机11驱动抬牙轴111与送布电机21驱动送布轴211同时对送布牙214产生送布动作。送布驱动组件还具有牙架座212,牙架213、送布牙214和抬牙叉形曲柄112。抬牙轴111直接连接在抬牙电机11的输出轴上,或者抬牙轴111也可以与抬牙电机11的输出轴成一体式,抬牙轴111的前端安装有抬牙叉形曲柄112。牙架213具有
的活动轴2131配合在抬牙叉形曲柄112内部,抬牙叉形曲柄112在抬牙电机11以反复来回摆运转方式驱动下向牙架213传递上下送布动作,使得送布牙214有了上下送布动作。
31.送布轴211直接连接在送布电机21的输出轴上,或者送布轴211也可以与送布电机21的输出轴成一体式。送布轴211的前端安装有牙架座212,牙架座212连接有牙架213,牙架213上固定有送布牙214,牙架座212和牙架213在送布电机21以反复来回摆运转方式驱动下向牙架213传递前后送布动作,使得送布牙214有了前后送布动作。
32.上述的抬牙电机11使送布牙214产生前后动作结合送布电机21使送布牙214产生上下动作,送布牙214便形成了缝纫机缝制时的送布功能。
33.一种缝纫机的送布牙定位方法是在缝纫机出厂前设置的:一要定位送布电机21和抬牙电机11的零点启动位置,二要定位送布牙214的前后送布中心位置和上下送布位置。首先,上述的抬牙电机11和送布电机21在控制系统的控制下定位零点启动位置,由控制系统确定,具体是由抬牙电机11和送布电机21的光栅来判断位置,抬牙电机11和送布电机21的光栅确定驱动开始位置即为零点启动位置。然后,将牙架座212套设在送布轴211上,将抬牙叉形曲柄112套设在抬牙轴111上,使得牙架213及送布牙214处于可自由活动的状态,再将送布牙214移到针板51内部的前后送布行程2141的中心位置上,此时,将牙架座212固死在送布轴211上,完成送布电机21的零点启动位置定位,以送布牙214的前后送布中心位置定位送布电机21的零点启动位置。最后,将送布牙214的牙尖最高点2142移到与针板51的上平面511齐平位置上,此时,将抬牙叉形曲柄112固死在抬牙电机11上,完成抬牙电机11的零点启动位置定位,以送布牙214的上下送布位置定位抬牙电机11的零点启动位置。定位了定位送布电机21和抬牙电机11的零点启动位置也就定位了送布牙214的前后送布中心位置和上下送布位置。在上面的定位送布电机21和抬牙电机11定位零点启动位置定位中,两者不分先后,无论是送布电机21还是抬牙电机11先执行定位,起到的技术效果是一样的。通过上述的送布电机21和抬牙电机11分别控制送布轴211和抬牙轴111,提高了送布牙的运行精度,提高了送布牙214所产生针距的角度,提高了缝纫机对送布牙214的智能控制水平。
34.上述的前后送布行程2141是指送布牙21在针板51内部的运行最大行程,送布牙214位于中心位置是指上述行程的中心位置。上述的送布牙214的牙尖最高点2142移到与针板51的上平面511齐平位置,这里还可以加上缝纫机机针的针尖与牙尖最高点2142、上平面511齐平,呈一直线状态。
35.定位了送布电机21和抬牙电机11的零点启动位置之后,送布电机21和抬牙电机11在控制系统的控制下执行缝制工作,结合图6,图中的反复来回摆运转角度91是指反复来回摆的运行角度,需要指出的是反复来回摆运转角度91显示的方向并不代表送布电机21和抬牙电机11实际的运行所在的角度。缝纫机在8mm的针距下,送布电机21驱动送步轴111以反复来回摆运转方式在24.5
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在9
°
范围内摆动,实现缝纫机8mm针距运转进行缝制工作。由于各种因素缝纫机运转的角度可能存在运转精度的差异,进一步地在8mm的针距设置,送布电机21驱动送步轴111以反复来回摆运转方式在22.5
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在7
°
范围内摆动。进一步地在8mm的针距设置,送布电机21驱动送步轴111以反复来回摆运转方式在20.5
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在5
°
范围内摆动。
36.另一种情景,缝纫机在7mm的针距下,送布电机21驱动送步轴111以反复来回摆运转方式在22.7
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在9
°
范围内摆动,实现缝纫机7mm针距运转进行缝制工作。由于各种因素缝纫机运转的角度可能存在运转精度的差异,进一步地在7mm的针距设置,送布电机21驱动送步轴111以反复来回摆运转方式在20.7
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在7
°
范围内摆动。进一步地在7mm的针距设置,送布电机21驱动送步轴111以反复来回摆运转方式在18.7
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在5
°
范围内摆动。
37.另一种情景,缝纫机在5mm的针距下,送布电机21驱动送步轴111以反复来回摆运转方式在15.8
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在9
°
范围内摆动,实现缝纫机5mm针距运转进行缝制工作。由于各种因素缝纫机运转的角度可能存在运转精度的差异,进一步地在5mm的针距设置,送布电机21驱动送步轴111以反复来回摆运转方式在13.8
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在7
°
范围内摆动。进一步地在5mm的针距设置,送布电机21驱动送步轴111以反复来回摆运转方式在11.8
°
范围内摆动,同时,抬牙电机11驱动抬牙轴211以反复来回摆运转方式在5
°
范围内摆动。
38.当然,本技术不局限于上述的8mm、7mm和5mm三个针距,在需要更大或者更小的针距情况下,可以以8mm的针距和7mm的针距比例推算出相应的针距摆动角度,也可以以7mm的针距和5mm的针距比例推算出相应的针距摆动角度,例如,需要9mm或者4mm等未知针距时,设未知针距为x,可以根据8mm、7mm和5mm三者之间的任意比例关系推算出x针距,并且,x针距的误差控制在正负1
°
范围之内。
39.旋梭电机31以旋转方式驱动下轴311旋转,旋转下的下轴311带动旋梭312旋转执行收线勾线动作。送布牙214的送布动作和旋梭312的收线勾线动作共同实现缝纫机的底线驱动机构。
40.上线驱动机构的上轴电机41以旋转方式驱动上轴411旋转,经过安装在上轴411使得旋转运转变为针杆413的上下移动运转的传动件412,实现了的针杆413穿过针板51的带线穿布动作,这样的上轴411上无凸轮设置,打破了传统缝纫机的设计理念,取消了由凸轮连接并驱动的送布连杆和抬牙连杆的技术方案,使得缝纫机制造上降低了成本,同时,提供了一种无需润滑系统的缝纫机。上轴电机41安装在上轴411靠近针杆413一侧或中部或后部位置,上述的上轴电机41后部还配置有风扇414,风扇414用于加速缝纫机内部空间空气对流,上轴电机41后部还连接有连接杆416,连接杆416的末端固定连接有调整针杆413位置的手轮415,上轴411与连接杆416都随上轴电机41的驱动而同步运行,连接杆416的直径要比上轴411小,连接杆416直径相对较小。这里,在上轴电机41安装的上轴411上无凸轮设置,无论上轴电机41安装在上轴411靠近针杆413一侧或在中部或在后部位置都是本技术主张的保护范围。
41.本技术的缝纫机打破了传统缝纫机的技术方案,取消了传统缝纫机的送布连杆、抬牙连杆以及主轴上的凸轮、竖轴和竖轴与下轴之间的锥度齿轮组,同时可以将送布轴211和抬牙轴111(实际是现有缝纫机中的抬牙轴和送布轴)制造更短以降低制造成本的同时,使得送布牙214的抬牙幅度也由控制系统来控制,进一步提高了缝制的智能化水平,同时要
指出的是去除了摆动座这一传统部件,但又能完全具备摆动座所具备的功能。抬牙电机11和送布电机21在控制系统的控制下同时开始驱动并且同时停止驱动,以达到送布牙驱动机构的协调送布动作,避免送布牙214或只有送布动作没有抬牙动作,或只有抬牙动作而没有传递送布动作的不协调缝纫动作。由于抬牙电机11和送布电机21的反复来回摆运转方式是由控制系统预设的,使得送布牙214的送布动作始终处于恒定的针距下进行缝制工作,即送布和抬牙都处于恒定状态,克服了现有缝纫机技术前后针距大小出现偏差的情况,有效提高了缝制质量和缝制工作的稳定性。
42.本技术缝纫机送布牙的驱动机构具有剪线和抬压脚驱动机构,剪线和抬压脚驱动机构具有剪线组件和抬压脚组件,剪线组件具有剪线和抬压脚电机61、剪线曲柄71、剪线叉轮72和剪线执行端73。其中,剪线曲柄71具有推动件711,推动件711设置在剪线曲柄71的偏心位置。推动件711推动剪线叉轮72进行剪线动作,剪线叉轮72具有回位杆722和剪线杆721,推动件711位于回位杆722和剪线杆721之间。在剪线和抬压脚电机61驱动剪线曲柄71下,推动件711推动剪线杆721使得剪线执行端73执行了剪线动作。
43.抬压脚组件具有剪线和抬压脚电机61、抬压脚凸轮74、抬压脚顶杆75和抬压脚执行端76,抬压脚凸轮74具有抬压脚凸轮抬升面741和空转圆弧面742,抬压脚凸轮74固定在剪线和抬压脚电机61的输出轴上,抬压脚凸轮抬升面741用于将抬压脚顶杆75在较低或较高位置调整到较高或较低位置,空转圆弧面742用于抬压脚顶杆75与抬压脚凸轮74之间的空转。空转圆弧面742与剪线和抬压脚电机61的输出轴同心设置,抬压脚凸轮抬升面741位于抬压脚凸轮74的凸轮部。
44.剪线动作完成后,抬压脚凸轮74开始执行抬压脚动作,剪线和抬压脚电机61在剪线动作时其旋转的角度不会使抬压脚凸轮74对抬压脚顶杆75产生实际的抬压脚动作,抬压脚顶杆75与空转圆弧面742在空转。剪线和抬压脚电机61驱动抬压脚凸轮74的抬压脚凸轮抬升面741使得抬压脚顶杆75随之提升,到达抬压脚顶杆75最高点即实现将抬压脚顶杆75抬到最高点,抬压脚执行端76完成抬压脚动作。
45.剪线和抬压脚电机61在剪线时顺势驱动抬压脚凸轮74,抬压脚凸轮74在剪线和抬压脚电机61驱动下抬压脚顶杆75从空转圆弧面742逐渐向抬压脚凸轮抬升面741过渡,直至到抬压脚最高点,实现抬压脚动作,此时剪线和抬压脚电机61锁定使得抬压脚状态维持一段时间,形成了剪断线后立即抬压脚的缝纫动作。
46.另外,在抬压脚过程中,推动件711推动回位杆722,使得推动件711推动回位杆722到原位,使得整个剪线组件复位,可以有效地将剪线组件在卡位的故障状态下直接回到原位,具有复位功能。
47.当要下放压脚时,剪线和抬压脚电机61顺势将抬压脚顶杆75从抬压脚凸轮抬升面741放回到空转圆弧面742,实现下放压脚动作。
48.在此,还存在另外的一种情景就是不剪线单执行抬压脚,通常是线迹需要在较大幅度的拐弯下作出的。剪线和抬压脚电机61驱动抬压脚凸轮抬升面741将抬压脚顶杆75顶到抬压脚最高点,放压脚时,剪线和抬压脚电机61驱动抬压脚凸轮抬升面741从反向返回完成放压脚动作。
49.以上所述仅为本技术的优选实施较佳方式之一,并非因此限制本技术的专利实施范围,凡是利用本技术说明书及附图内容的形状、结构、原理所作等效结构或等效流程变
换,或直接或间接运用在其它相关的技术领域,均涵盖包括在本技术的专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。