1.本发明涉及纺织技术领域,具体来说,涉及一种基于人工智能的纺织服装加工用切割设备。
背景技术:
2.纺织原意是取自纺纱与织布的总称,但是随着纺织知识体系和学科体系的不断发展和完善,特别是非织造纺织材料和三维复合编织等技术产生后,已经不仅是传统的手工纺纱和织布,也包括无纺布技术,现代三维编织技术,现代静电纳米成网技术等生产的服装用、产业用、装饰用纺织品。所以,现代纺织是指一种纤维或纤维集合体的多尺度结构加工技术。纺织品,即经纺织加工而成的产品。包括纱线、机织物、针织物、编织物等。分为梭织布和针织布两大类。
3.在纺织服装加工过程中,需要使用到切割设备,对布料进行切割,然而传统的切割设备在使用过程中,通常使用人工将铺设在切割台面的布料进行整平,人工整平费时费力,大大降低了整平时的便利性。
4.为此,我们提出一种基于人工智能的纺织服装加工用切割设备。
技术实现要素:
5.本发明的技术任务是针对以上不足,提供一种基于人工智能的纺织服装加工用切割设备,通过增设整平组件,整平组件底部的气缸伸长可以使整平辊压紧铺设好的布料,再通过开启电机,可以带动整平组件来回运动,进而使整平辊在布料上来回滚动,即可达到整平的目的,避免了人工整平费时费力的问题,进而提高了整平时的便利性,来解决上述问题。
6.本发明的技术方案是这样实现的:本发明提供了一种基于人工智能的纺织服装加工用切割设备,包括:固定箱、切割台板、切割组件、滑动座、整平组件、支撑柱和驱动组件,所述切割台板固定安装于固定箱的顶部,所述滑动座的数量为两个,两个所述滑动座分别固定安装于切割台板的两侧,所述切割组件滑动连接于切割台板的顶部,所述整平组件滑动连接有切割台板的顶部,所述整平组件位于切割组件的一侧,所述驱动组件的数量为两个,两个所述驱动组件分别固定安装于整平组件的两侧,所述固定箱底部的四角均焊接有支撑柱;所述切割台板包括板体,所述板体固定安装于固定箱的顶部,所述板体的顶部设置有切割槽,所述切割槽的两侧均焊接有隔板;所述滑动座包括两个固定长柱,两个所述固定长柱分别焊接于板体的两侧,两个所述固定长柱呈对称设置,所述固定长柱远离板体的一侧焊接有齿条,所述固定长柱的顶部开设有移动开槽;所述整平组件包括固定顶板,所述固定顶板位于板体的上方,所述固定顶板底部的两侧均焊接有移动柱,两个所述移动柱呈对称设置,所述移动柱的底部焊接有连板,所述
连板的底部焊接有两组滚轮固定块,每组所述滚轮固定块的数量均为两个,每组滚轮固定块的中心处均贯穿有滚轮轴,所述滚轮轴的表面转动连接有滚轮,所述滚轮位于两个滚轮固定块的中心处,所述固定顶板底部的中心处固定安装有气缸,所述气缸的伸长端焊接有移动板,所述移动板底部的两侧均焊接有活动箱,两个所述活动箱呈对称设置,所述活动箱的内部开设有活动腔,所述活动腔内腔的底部滑动连接有第二活动板,所述第二活动板的顶部焊接有弹簧,所述弹簧远离第二活动板的一端焊接有第一活动板,所述第一活动板与活动腔的内壁滑动连接,所述第二活动板的底部焊接有支撑板,所述支撑板的底端贯穿活动箱,所述活动箱的底部开设有供支撑板穿过的第一通孔,两个所述支撑板呈对称设置,两个所述支撑板相对的内侧焊接有固定轴,所述固定轴的表面转动连接有整平辊;所述驱动组件包括电机箱,所述电机箱焊接于固定顶板的两端,两个所述电机箱呈对称设置,所述电机箱的内腔固定安装有电机,所述电机的输出端焊接有转动轴,所述电机箱的底部开设有供转动轴穿过的第二通孔,所述转动轴的底端贯穿第二通孔,所述转动轴的底端焊接有齿轮,所述齿轮位于齿条的一侧,所述齿轮与固定长柱相啮合。
7.作为优选,所述移动板顶部的两侧均焊接有限位柱,所述固定顶板底部的两侧均焊接有套管。
8.作为优选,所述套管的底部开设有通槽,所述通槽的直径大于限位柱的直径,所述限位柱的顶部与通槽插接。
9.作为优选,所述支撑柱的底部均粘接有橡胶垫,所述橡胶垫的直径大于支撑柱的直径。
10.作为优选,所述移动开槽两侧的内壁均开设有限位滑槽,所述限位滑槽的宽度大于滚轮轴的直径,所述滚轮轴的两端分别延伸至两个限位滑槽的内腔,所述滚轮轴与限位滑槽滑动连接。
11.作为优选,还包括人工智能模块和摄像头,所述人工智能模块固定安装于固定箱的后侧,所述摄像头固定安装于固定顶板后侧的中心处。
12.作为优选,所述摄像头的电性输出端与人工智能模块的电性输入端电性连接。
13.作为优选,所述活动腔内部的顶部固定安装有压力传感器,所述压力传感器的底部与第一活动板的顶部相接触。
14.作为优选,所述压力传感器的电性输出端与人工智能模块的电性输入端电性连接。
15.作为优选,所述电机的电性输入端与人工智能模块的电性输出端电性连接,所述气缸的电性输入端与人工智能模块的电性输出端电性连接。
16.与现有技术相比,本发明的优点和积极效果在于:1、本发明通过增设整平组件,整平组件底部的气缸伸长可以使整平辊压紧铺设好的布料,再通过开启电机,可以带动整平组件来回运动,进而使整平辊在布料上来回滚动,即可达到整平的目的,避免了人工整平费时费力的问题,进而提高了整平时的便利性;2、本发明通过设置连板、滚轮、滚轮轴和滚轮固定块能够对移动柱进行支撑,同时滚轮在移动开槽的内腔滚动,能够极大的提高整平组件在运动时的流畅性,避免了整平组件在运动过程中出现卡死的状况;3、本发明通过摄像头采集切割槽顶部的视频信号,通过人工智能模块对视频信号
分析处理,从而识别出铺设在切割槽顶部的服装布料的形状、大小和位置,从而针对性的控制整平辊的工作范围,提高了整平效率,避免了整平组件在为铺设服装布料的空处进行工作。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1是根据本发明实施例的基于人工智能的纺织服装加工用切割设备的结构示意图;图2是根据本发明实施例的基于人工智能的纺织服装加工用切割设备的仰视结构示意图;图3是根据本发明实施例的基于人工智能的纺织服装加工用切割设备的左视结构示意图;图4是根据本发明实施例的基于人工智能的纺织服装加工用切割设备的后视结构示意图;图5是根据本发明实施例的滑动座与整平组件的配合结构示意图;图6是根据本发明图5中a的局部结构放大图;图7是根据本发明实施例的整平组件的结构示意图;图8是根据本发明实施例的滚轮与支撑板的配合结构示意图;图9是根据本发明实施例的活动箱的剖面结构示意图;图10是根据本发明实施例的驱动组件的剖面结构示意图;图11是根据本发明实施例的滑动座的剖面结构示意图;图12是根据本发明图11中b的局部结构放大图;图13是根据本发明实施例4的系统原理图。
19.图中:1、固定箱;2、切割台板;3、切割组件;4、滑动座;5、整平组件;6、支撑柱;7、驱动组件;8、人工智能模块;9、摄像头;21、板体;22、切割槽;23、隔板;41、固定长柱;42、齿条;43、移动开槽;44、限位滑槽;51、固定顶板;52、移动板;53、活动箱;54、移动柱;55、连板;56、气缸;57、整平辊;58、套管;59、限位柱;510、支撑板;511、固定轴;512、压力传感器;513、第一活动板;514、弹簧;515、第二活动板;516、活动腔;517、滚轮;518、滚轮轴;519、滚轮固定块;71、电机箱;72、转动轴;73、齿轮;74、电机。
具体实施方式
20.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
21.下面结合附图和具体实施例对本发明作进一步说明。
22.实施例1
如图1
‑
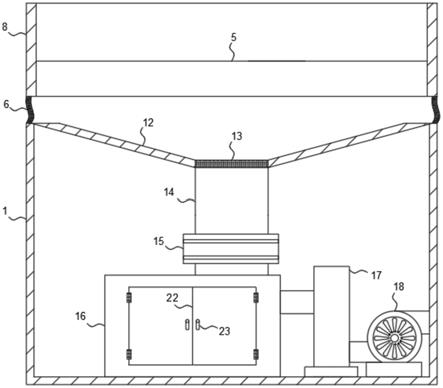
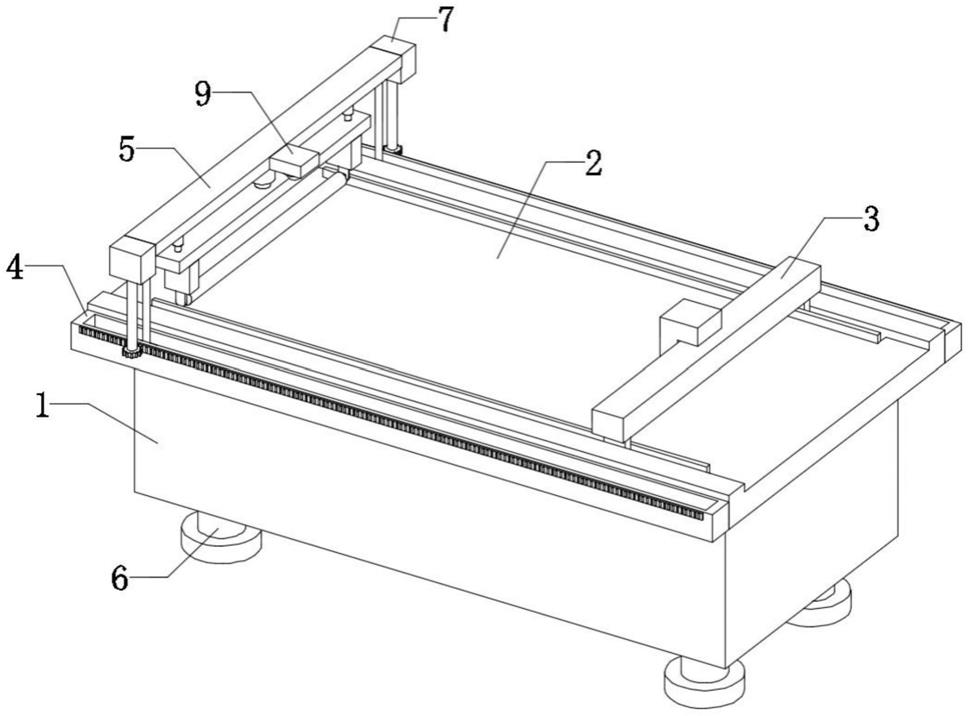
图12所示,根据本发明实施例的一种基于人工智能的纺织服装加工用切割设备,固定箱1、切割台板2、切割组件3、滑动座4、整平组件5、支撑柱6和驱动组件7,切割台板2固定安装于固定箱1的顶部,滑动座4的数量为两个,两个滑动座4分别固定安装于切割台板2的两侧,切割组件3滑动连接于切割台板2的顶部,整平组件5滑动连接有切割台板2的顶部,整平组件5位于切割组件3的一侧,驱动组件7的数量为两个,两个驱动组件7分别固定安装于整平组件5的两侧,固定箱1底部的四角均焊接有支撑柱6。
23.切割台板2包括板体21,板体21固定安装于固定箱1的顶部,板体21的顶部设置有切割槽22,切割槽22的两侧均焊接有隔板23。
24.滑动座4包括两个固定长柱41,两个固定长柱41分别焊接于板体21的两侧,两个固定长柱41呈对称设置,固定长柱41远离板体21的一侧焊接有齿条42,固定长柱41的顶部开设有移动开槽43。
25.整平组件5包括固定顶板51,固定顶板51位于板体21的上方,固定顶板51底部的两侧均焊接有移动柱54,两个移动柱54呈对称设置,移动柱54的底部焊接有连板55,连板55的底部焊接有两组滚轮固定块519,每组滚轮固定块519的数量均为两个,每组滚轮固定块519的中心处均贯穿有滚轮轴518,滚轮轴518的表面转动连接有滚轮517,滚轮517位于两个滚轮固定块519的中心处,固定顶板51底部的中心处固定安装有气缸56,气缸56的伸长端焊接有移动板52,移动板52底部的两侧均焊接有活动箱53,两个活动箱53呈对称设置,活动箱53的内部开设有活动腔516,活动腔516内腔的底部滑动连接有第二活动板515,第二活动板515的顶部焊接有弹簧514,弹簧514远离第二活动板515的一端焊接有第一活动板513,第一活动板513与活动腔516的内壁滑动连接,第二活动板515的底部焊接有支撑板510,支撑板510的底端贯穿活动箱53,活动箱53的底部开设有供支撑板510穿过的第一通孔,两个支撑板510呈对称设置,两个支撑板510相对的内侧焊接有固定轴511,固定轴511的表面转动连接有整平辊57。
26.驱动组件7包括电机箱71,电机箱71焊接于固定顶板51的两端,两个电机箱71呈对称设置,电机箱71的内腔固定安装有电机74,电机74的输出端焊接有转动轴72,电机箱71的底部开设有供转动轴72穿过的第二通孔,转动轴72的底端贯穿第二通孔,转动轴72的底端焊接有齿轮73,齿轮73位于齿条42的一侧,齿轮73与固定长柱41相啮合。
27.通过采用上述技术方案,本发明通过增设整平组件5,整平组件5底部的气缸56伸长可以使整平辊57压紧铺设好的布料,再通过开启电机74,可以带动整平组件5来回运动,进而使整平辊57在布料上来回滚动,即可达到整平的目的,避免了人工整平费时费力的问题,进而提高了整平时的便利性,通过设置连板55、滚轮517、滚轮轴518和滚轮固定块519能够对移动柱54进行支撑,同时滚轮517在移动开槽43的内腔滚动,能够极大的提高整平组件5在运动时的流畅性,避免了整平组件5在运动过程中出现卡死的状况。
28.移动板52顶部的两侧均焊接有限位柱59,固定顶板51底部的两侧均焊接有套管58,套管58的底部开设有通槽,通槽的直径大于限位柱59的直径,限位柱59的顶部与通槽插接,通过采用上述技术方案,能够在移动板52带动限位柱59下移的过程中,使限位柱59始终保持在同一轴线,进而到了对限位柱59限位的目的,进而提高了移动板52下移时的稳定性,避免了整平辊57出现偏转的状况。
29.移动开槽43两侧的内壁均开设有限位滑槽44,限位滑槽44的宽度大于滚轮轴518
的直径,滚轮轴518的两端分别延伸至两个限位滑槽44的内腔,滚轮轴518与限位滑槽44滑动连接,通过采用上述技术方案,能够对滚轮轴518进行限位,避免了滚轮轴518出现左右倾斜的状况,进而提高了整平组件5运动时的稳定性。
30.实施例2更为具体的,如图2所示,本实施例与上述实施例的不同之处在于,支撑柱6的底部均粘接有橡胶垫,橡胶垫的直径大于支撑柱6的直径,通过采用上述技术方案,能够增大支撑柱6与地面之间的接触面积,进而提高了支撑柱6的稳定性,同时增大了支撑柱6与地面之间的摩擦力。避免了支撑柱6发生滑动的状况。
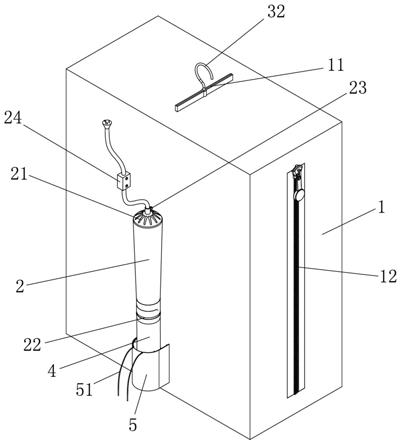
31.实施例3更为具体的,如图1和13所示,本实施例与上述实施例的不同之处在于,还包括人工智能模块8和摄像头9,人工智能模块8固定安装于固定箱1的后侧,摄像头9固定安装于固定顶板51后侧的中心处,摄像头9的电性输出端与人工智能模块8的电性输入端电性连接,电机74的电性输入端与人工智能模块8的电性输出端电性连接,能够通过摄像头9采集切割槽22顶部的视频信号,通过人工智能模块8对视频信号分析处理,从而识别出铺设在切割槽22顶部的服装布料的形状、大小和位置,人工智能模块8再通过分别控制两个电机74以同样的转速转动,其中两个电机74的转动方向相反,进而使两个电机74分别通过转动轴72带动两个齿轮73转动,齿轮73通过与齿条42配合,进而带动整平组件5在切割台板2的顶部进行平移,使整平组件5底部的整平辊57在服装布料的顶部进行整平,提高了整平效率,避免了整平组件5在为铺设服装布料的空处进行工作。
32.实施例4更为具体的,如图9和13所示,本实施例与上述实施例的不同之处在于,活动腔516内部的顶部固定安装有压力传感器512,压力传感器512的底部与第一活动板513的顶部相接触,压力传感器512的电性输出端与人工智能模块8的电性输入端电性连接,气缸56的电性输入端与人工智能模块8的电性输出端电性连接,通过采用上述技术方案,开启气缸56,气缸56伸长端通过移动板52下压整平辊57,整平辊57在于服装布料接触后,整平辊57通过固定轴511支撑支撑板510,使支撑板510保持在静止不动,支撑板510进而使第二活动板515保持静止,此时移动板52继续推动活动箱53下移,活动箱53带动内腔的压力传感器512下移,压力传感器512通过第一活动板513压缩弹簧514,进而使压力传感器512产生压力数据,压力数据传输至人工智能模块8后,经过人工智能模块8分析处理,即可控制气缸56停止,避免整平辊57过度压迫服装布料。
33.为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明。
34.在实际应用时,本发明通过摄像头9采集切割槽22顶部的视频信号,通过人工智能模块8对视频信号分析处理,从而识别出铺设在切割槽22顶部的服装布料的形状、大小和位置,开启气缸56,气缸56伸长端通过移动板52下压整平辊57时,整平辊57在于服装布料接触后,整平辊57通过固定轴511支撑支撑板510,使支撑板510保持在静止不动,支撑板510进而使第二活动板515保持静止,此时移动板52继续推动活动箱53下移,活动箱53带动内腔的压力传感器512下移,压力传感器512通过第一活动板513压缩弹簧514,进而使压力传感器512产生压力数据,压力数据传输至人工智能模块8后,经过人工智能模块8分析处理,即可控制
气缸56保持在伸长态,再通过分别控制两个电机74以同样的转速转动,其中两个电机74的转动方向相反,进而使两个电机74分别通过转动轴72带动两个齿轮73转动,齿轮73通过与齿条42配合,进而带动整平组件5在切割台板2的顶部进行平移,固定顶板51通过移动柱54带动连板55在移动开槽43的内腔滑动,连板55通过滚轮固定块519带动滚轮517转动移动开槽43的内腔滚动,进而带动整平组件5在切割台板2的顶部进行平移,使整平组件5底部的整平辊57在服装布料的顶部进行滚动,达到了整平的目的,提高了整平效率,避免了整平组件5在为铺设服装布料的空处进行工作。
35.通过上面具体实施方式,所述技术领域的技术人员可容易的实现本发明。但是应当理解,本发明并不限于上述的具体实施方式。在公开的实施方式的基础上,所述技术领域的技术人员可任意组合不同的技术特征,从而实现不同的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。