1.本发明涉及巡检无人机技术领域,特别是涉及一种巡检无人机智能换电站及智能换电方法。
背景技术:
2.多旋翼无人机由于其操控容易,飞行稳定性高的特点,在各专业领域都得到了广泛的应用。在巡检领域,巡检无人机需要连续执行巡检任务,现有的无人机大都续航时间短,需要频繁更换电池,在无人机连续执行任务时,频繁更换电池需要配备人力随时待命,耗费人工成本。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种能够自动为无人机更换电池的巡检无人机智能换电站及智能换电方法。
4.技术方案:为实现上述目的,本发明的巡检无人机智能换电站,其包括自动换电站以及安装在无人机上的辅助换电模块;
5.所述自动换电站包括机座、无人机定位装置、电池充电座以及换电池机构;
6.所述辅助换电模块包括辅助定位装置以及对接固定装置;
7.所述无人机定位装置通过所述无人机定位装置与所述辅助定位装置对接以实现所述无人机相对于所述机座的定位与固定;
8.所述电池充电座具备多个用于容置电池的充电舱,所述换电池机构用于在所述无人机与所述电池充电座之间取换电池。
9.进一步地,所述辅助定位装置包括对称安装在所述无人机的下端的两个起落架,所述起落架呈u字形,其包括横置杆以及分别将所述横置杆的两端连接所述无人机的本体的两个竖置杆;
10.所述无人机定位装置包括两组定位爪手以及开合驱动组件,每组所述定位爪手均包括两个可相对作靠近或远离运动的手指部;所述手指部上具备v字定位部;
11.所述开合驱动组件能够驱动两组定位爪手作开合运动。
12.进一步地,所述开合驱动组件包括两个相互平行且等速反向转动的驱动轴,两个所述驱动轴分别用于驱动两个所述定位爪手运转。
13.进一步地,所述定位爪手还包括连杆与滑块;所述v字定位部铰接在所述手指部上;所述连杆始终与所述手指部平行,所述连杆的两端分别铰接在所述v字定位部与所述滑块上。
14.进一步地,每组所述定位爪手所包含的两个所述手指部均由丝杠驱动运转,所述丝杠的两端分别设置左旋螺纹与右旋螺纹,两个所述手指部上对应于所述左旋螺纹与右旋螺纹的丝杠螺母。
15.进一步地,所述无人机定位装置安装在水平滑座上,所述水平滑座被直线驱动元
件驱动以相对于所述机座作平移运动。
16.进一步地,所述电池安装在电池托架上,所述电池托架上安装有与其上电池电连接的第二对接接口;
17.所述充电舱内以及所述无人机上均安装有对接固定装置。
18.进一步地,所述换电池机构包括能够在所述无人机定位装置与所述电池充电座之间运动取放爪手。
19.无人机智能换电方法,所述方法包括:
20.控制需要更换电池的无人机降落至所述自动换电站,并使所述辅助定位装置与所述无人机定位装置对接以实现对所述无人机的定位;
21.控制所述换电池机构取出所述无人机上的旧电池;
22.控制所述换电池机构将旧电池装入所述电池充电座上的一个空的充电舱;
23.控制所述换电池机构从所述电池充电座上取下一个满电的新电池;
24.控制所述换电池机构将新电池装入无人机,所述对接固定装置将新电池固定。
25.有益效果:本发明的巡检无人机智能换电站及智能换电方法,通过设置无人换电站,通过无人换电站的无人机定位装置以及无人机上的辅助换电模块,可实现对无人机的自动定位,再通过换电池机构可对无人机进行自动换电池,实现无人机的连续作业,无需人工值守。
附图说明
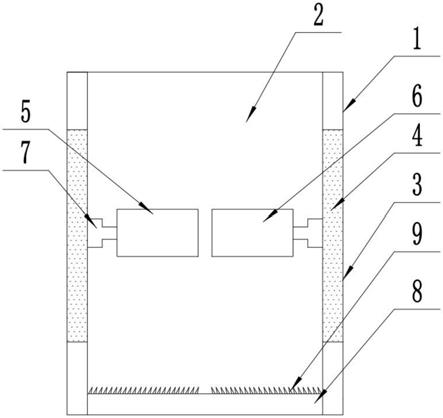
26.附图1为巡检无人机智能换电站的结构图;
27.附图2为无人机与无人机定位装置的组合结构图;
28.附图3为初始状态下无人机定位装置的正视图;
29.附图4为初始状态下无人机定位装置的侧视图;
30.附图5为无人机定位装置的立体结构图;
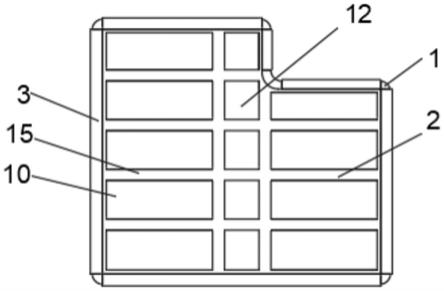
31.附图6为电池托架的结构图;
32.附图7为充电舱、对接固定装置以及电池托架的组合结构图;
33.附图8为附图6中a部分的放大结构图;
34.附图9为闭环槽组的结构图;
35.附图10为取放爪手的结构图;
36.附图11为两个夹持爪打开至最大角度后取放爪手的结构图;
37.附图12为换电池机构的整体结构图;
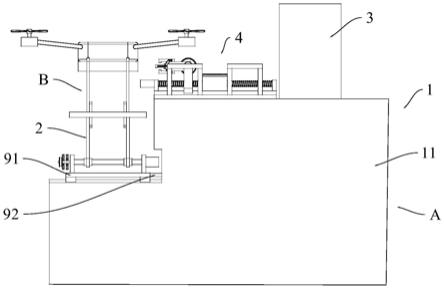
38.附图13为升降驱动组件与充电座的组合结构图。
39.图中:自动换电站a;辅助换电模块b;机座1;机箱11;无人机定位装置2;定位爪手21;手指部211;v字定位部212;连杆213;滑块214;丝杠215;第二过渡齿轮216;传动齿轮217;丝杠电机218;开合驱动组件22;驱动轴221;开合电机222;中间轴223;第一过渡齿轮224;同步带组件225;电池充电座3;充电舱31;换电池机构4;移动座41;取放爪手42;爪手座421;推挤部4211;推杆422;夹持爪423;连接杆424;复位弹簧425;齿轮43;齿条44;齿轮轴45;保持部451;保持导轨46;保持槽461;移动丝杠47;平移电机48;升降驱动组件5;升降座51;升降丝杠52;升降电机53;电池托架61;进出直槽611;第一进程槽612;第一回程槽613;
第二进程槽614;第二回程槽615;暂留槽616;第一台阶 617;第二台阶618;第三台阶619;第四台阶610;对接固定装置7;第一对接接口71;l形弹性杆72;弹簧73;辅助定位装置8;起落架81;横置杆811;竖置杆812;水平滑座91;直线驱动元件92。
具体实施方式
40.下面结合附图对本发明作更进一步的说明。
41.如附图1所述的巡检无人机智能换电站,其包括自动换电站a以及安装在无人机上的辅助换电模块b;所述自动换电站a包括机座1、无人机定位装置2、电池充电座3以及换电池机构4;所述辅助换电模块b包括辅助定位装置8以及对接固定装置7;所述无人机定位装置2通过所述无人机定位装置2与所述辅助定位装置8对接以实现所述无人机相对于所述机座1 的定位与固定;所述电池充电座3具备多个用于容置电池的充电舱31,所述换电池机构4用于在所述无人机与所述电池充电座3之间取换电池。上述各部件均连接控制器,能够被控制器控制运转。
42.具体地,如附图2所示,所述辅助定位装置8包括对称安装在所述无人机的下端的两个起落架81,所述起落架81呈u字形,其包括横置杆811 以及分别将所述横置杆811的两端连接所述无人机的本体的两个竖置杆 812;如附图3
‑
5所示,所述无人机定位装置2包括两组定位爪手21以及开合驱动组件22,每组所述定位爪手21均包括两个可相对作靠近或远离运动的手指部211;所述手指部211上具备v字定位部212;所述开合驱动组件22能够驱动两组定位爪手21作开合运动。
43.所述开合驱动组件22包括两个相互平行且等速反向转动的驱动轴221,两个所述驱动轴221分别用于驱动两个所述定位爪手21运转。
44.采用上述结构,无人机定位装置2对无人机进行定位的过程如下:如附图3
‑
4所示,初始状态下,两组定位爪手21处于合拢状态,且每组定位爪手21包含的两个手指部211处于相互靠近状态,无人机飞行至第一指定位置,并在第一指定位置悬停,此时,两组定位爪手21的v字定位部212 均置于两个横置杆811之间;然后,控制器控制两组定位爪手21切换至散开状态,过程中两组定位爪手21的两组v字定位部212相互远离,分别作用于两个横置杆811,当两组v字定位部212之间的距离达到最大,每个横置杆811均置于其接触的v字定位部212的槽底位置;最后,开合驱动组件22运转,驱动两组定位爪手21由合拢状态切换至远离状态,当两组定位爪手21之间的距离达到最大,同一定位爪手21的两个v字定位部212 分别抵住其对应的起落架81的两个竖置杆812,如此,即完成了对无人机的定位。
45.优选地,如附图5所示,所述定位爪手21还包括连杆213与滑块214;所述v字定位部212铰接在所述手指部211上;所述连杆213始终与所述手指部211平行,所述连杆213的两端分别铰接在所述v字定位部212与所述滑块214上,滑块214相对于驱动轴221滑动安装,滑块214能相对于驱动轴221轴向滑动,而不能相对于驱动轴221转动。如此,由于连杆 213始终与所述手指部211平行,连杆213上的两个铰接中心与手指部211 上的两个铰接中心构成平行四边形的四个角点,当驱动轴221转动时,连杆213与手指部211同步转动,以使得两组定位爪手21作开合运动,由于平行四边形的特性,v字定位部212的姿态能够保持不变。
46.上述驱动轴221由开合电机222驱动运转,所述开合驱动组件22两个中间轴223,两个中间轴223上分别转动安装有第一过渡齿轮224,两个第一过渡齿轮224相互啮合,两个驱
动轴221通过两组同步带组件225分别与两个第一过渡齿轮224驱动连接。其中一个驱动轴221与开合电机222 直接驱动连接,如此,可实现两个驱动轴221等速反向转动;
47.上述两个中间轴223上还分别转动安装有第二过渡齿轮216,两个第二过渡齿轮216相互啮合,两个丝杠215上分别固定有传动齿轮217,两个传动齿轮217分别与两个第二过渡齿轮216啮合,其中一个丝杠215与丝杠电机218驱动连接,如此可实现一个丝杠电机218驱动两个丝杠215运转。
48.每组所述定位爪手21所包含的两个所述手指部211均由丝杠215驱动运转,所述丝杠215的两端分别设置左旋螺纹与右旋螺纹,两个所述手指部211上对应于所述左旋螺纹与右旋螺纹的丝杠螺母。如此,同一丝杠215 能够驱动两个手指部211作开合运动。
49.优选地,如附图1所示,所述无人机定位装置2安装在水平滑座91上,所述水平滑座91被直线驱动元件92驱动以相对于所述机座1作平移运动。采用该结构,水平滑座91可在获取位置与换电池位置之间移动,当水平滑座91处于获取位置时,无人机可与无人机定位装置2对接;当水平滑座91 处于换电池位置时,换电池机构4能够将电池从无人机中取出或将电池装入无人机。
50.进一步地,如附图6所示,所述电池安装在电池托架61上,所述电池托架61上安装有与其上电池电连接的第二对接接口62;所述充电舱31内以及所述无人机的充电舱内均安装有对接固定装置7。
51.如附图7所示,对接固定装置7包括第一对接接口71、l形弹性杆72 以及弹簧73;第一对接接口71安装在充电舱31或无人机的电池舱的底部; l形弹性杆72的一端固定在充电舱31或无人机的电池舱内(图示为充电舱 31),l形弹性杆72的另一端为开放端。电池托架61上具有槽口结构,l 形弹性杆72自身的弹性使得其开放端始终与槽口结构的槽底接触。
52.如附图6所示,所述槽口结构包括进出直槽611以及与所述进出直槽611连通的闭环槽组,如附图8
‑
9所示,所述闭环槽组包括由所述进出直槽 611的前端向前延伸的第一进程槽612、由所述第一进程槽612的前端向后倾斜延伸的第一回程槽613、由所述第一回程槽613的后端向前倾斜延伸的第二进程槽614、以及连接所述第二进程槽614的前端与所述进出直槽611 的前端的第二回程槽615;在所述电池托架2的进出方向上,所述第一回程槽613的投影长度小于所述第一进程槽612的长度;所述第一回程槽613 与所述第二进程槽614的交界点处形成有用于容置所述l形弹性杆72的开放端的暂留槽616;当所述l形弹性杆72的开放端置于所述暂留槽616内时,所述电池托架61相对于所述充电舱31或无人机的电池舱固定。
53.所述进出直槽611的前端与所述第一进程槽612的后端之间平滑过渡,所述第一进程槽612的前端高于所述第一回程槽613的前端,两者之间设有第一台阶617;所述第一回程槽613的后端高于所述第二进程槽614的后端,两者之间设置第二台阶618;所述第二进程槽614的前端高于所述第二回程槽615的前端,两者之间设有第三台阶619;所述第二回程槽615的后端高于所述进出直槽611的前端,两者之间设置有第四台阶610。
54.通过上述结构,使得l形弹性杆72的开放端能够沿着闭环槽组单向运动。
55.第一对接接口71相对于充电舱31或无人机的电池舱滑动安装,弹簧 73设置在舱室(充电舱31或无人机的电池舱)的底部与第一对接接口71 之间。
56.所述换电池机构4包括能够在所述无人机定位装置2与所述电池充电座3之间运动
取放爪手42。
57.如附图10所示,所述取放爪手42包括爪手座421、推杆422、夹持爪 423以及滑动块426;所述夹持爪423有两个,两者均转动安装在所述爪手座421的前端,且两者能够相对开合,其开合由所述推杆422驱动。爪手座421上具有用于向电池托架61施加推力的推挤部4211。
58.所述推杆422滑动安装在所述爪手座421上,所述滑动块426滑动安装在所述推杆422上,每个所述夹持爪423与所述滑动块426之间均设有连接杆424,所述推杆422通过推挤弹簧427作用于所述滑动块426,所述滑动块426与所述爪手座421之间设有复位弹簧425。所述推挤弹簧427的刚度大于所述复位弹簧425的刚度。
59.通过上述取放爪手42,取出电池时,取放爪手42向靠近无人机或充电座3的方向运动,运动过程中,推杆422先与无人机或充电座3接触,如此,推杆422相对于爪手座421滑动,推杆422通过推挤弹簧427作用于滑动块426,使得两个夹持爪423相对打开,两个夹持爪423打开至最大角度(如附图11所示)后推杆422压缩推挤弹簧427以继续滑动;然后,爪手座421上的推挤部4211与电池托架61接触,对电池托架61施加推力并在与电池托架61接触后继续正向运动第一设定距离,此期间,原来l形弹性杆72的开放端置于暂留槽616内,推挤部4211的推动使得沿着第二进程槽614运动,并到达第二进程槽614的前端,然后,取放爪手42后退,弹簧73的复位力使得电池托架61反向运动,反向运动过程中,开放端沿着第二回程槽615运动并进入进出直槽611,当推杆422脱离无人机或充电座3后,两个夹持爪423完全闭合并夹住电池托架61,如此,取放爪手42 继续后退时,会对电池托架61施加拉力,使电池托架61脱离电池舱11,完成快拆。装入电池时,取放爪手42夹着电池托架61靠近无人机或充电座3,电池托架61进入电池舱11并运动一段距离后,推杆422与无人机或充电座3接触,推杆422相对于爪手座421滑动间接使得两个夹持爪423 相对打开,推挤部4211继续推着电池托架61正向运动,过程中,l形弹性杆72的开放端沿着进出直槽611进入槽口结构61,当开放端到达槽口结构 61的前端,开放端进入第一进程槽612,开放端到达第一进程槽612的前端后,开放端到达整个槽口结构61的最前端,随后,取放爪手42后退,弹簧73的复位力使得电池托架61反向运动,反向运动时,开放端沿着第一回程槽613运动,并到达暂留槽616,如此完成了电池的快装。
60.如附图12所示,所述换电池机构4还包括往复运动的移动座41以及用于取出、装回电池的取放爪手42;所述取放爪手42能够随着所述移动座 41转动,并能够相对所述移动座41翻转设定角度,以使得所抓取的电池的头部对着无人机或对着所述电池充电座3。当取放爪手42需要对无人机进行装、卸电池的作业时,取放爪手42的头部朝向无人机,当取放爪手42 需要对电池充电座3进行装、卸电池的作业时,取放爪手42的头部朝向电池充电座3。
61.优选地,为了使得对换电池机构4的控制变得简单,移动座41的平移运动与取放爪手42的翻转运动之间能够联动,具体地,所述取放爪手42 包括爪手座421,所述爪手座421通过齿轮轴45转动安装在所述移动座41 上;所述移动座41上还转动安装有齿轮43,所述机座1上固定安装有能够与所述齿轮43啮合的齿条44;所述齿轮43与所述爪手座421之间具有传动关系,以使得所述爪手座421随着所述齿轮43转动;所述齿轮轴45上形成有保持部451,所述保持部451具备两个相互平行且相对距离为第一距离的面;所述机座1上还安装有两个保持导轨46,所述保持导轨46上形成有供所述保持部451进出的保持槽461,所述保持槽461
的宽度与所述第一距离相等;两个所述保持导轨46置于所述齿条44的两端,当所述齿轮43 与所述齿条44脱开,所述保持部451进入所述保持导轨46的保持槽461 并相对于保持槽461滑动。所述移动座41被移动丝杠47驱动移动,所述移动丝杠47与平移电机48驱动连接。
62.如附图13所示,所述电池充电座3通过升降驱动组件5安装在所述机座1上,所述升降驱动组件5包括升降座51、升降丝杠52以及升降电机 53,所述电池充电座3安装在所述升降座51上;所述升降座51被所述升降丝杠52驱动以作升降运动,所述升降电机53与所述升降丝杠52驱动连接。
63.通过上述结构,换电池机构4执行换电池的过程如下:在没有任务执行的闲置状态下,取放爪手42的头部朝着无人机定位装置2,保持部451 置于靠近无人机定位装置2的保持导轨46的保持槽461内,此时,爪手座 421无法相对于移动座41转动只能相对于机座1滑动;当无人机被无人机定位装置2固定后,控制器控制升降驱动组件5运转使电池充电座3上空的充电舱31与取放爪手42平齐,控制器驱动平移电机48运转,以控制移动座41先向无人机移动到第一限位,取放爪手42取到旧电池后,控制器驱动平移电机48反转,移动座41反向平移,平移过程中,保持部451运动至当前所在保持槽461的末端并脱出保持槽461,在保持部451脱离保持槽461的时候,齿轮43与齿条44对接建立啮合关系,随着移动座41的移动,齿轮43与齿条44的啮合关系使得爪手座421翻转180度,如此,取放爪手42的端部朝向电池充电座3。爪手座421翻转180度后,齿轮43脱离齿条44,保持部451进入靠近电池充电座3一侧保持导轨46的保持槽 461,如此爪手座421后续只能相对于机座1滑动而不能相对于移动座41 转动,当移动座41运动至第二限位,取放爪手42将旧电池装入空的充电舱31中。然后,控制器控制移动座41反向平移设定距离,并控制升降驱动组件5运转,使得电池充电座3上一个装着充满电的电池的充电舱31与取放爪手42齐平,再控制移动座41运动至第二限位,使得取放爪手42取到新电池;然后控制器再控制移动座41反向运动至第一限位,将电池装入无人机的电池舱内,最后,控制器控制移动座41回到初始位置。
64.所述机座1上具备机箱11;当所述电池充电座3处于最低位置,其整体置于所述机箱11内。如此,可对电池充电座3起到保护作用。
65.本发明还提供了一种无人机智能换电方法,所述方法包括如下步骤:
66.步骤1),控制需要更换电池的无人机降落至所述自动换电站a,并使所述辅助定位装置8与所述无人机定位装置2对接以实现对所述无人机的定位;
67.步骤2),控制所述换电池机构4取出所述无人机上的旧电池;
68.步骤3),控制所述换电池机构4将旧电池装入所述电池充电座3上的一个空的充电舱31;
69.步骤4),控制所述换电池机构4从所述电池充电座3上取下一个满电的新电池;
70.步骤5),控制所述换电池机构4将新电池装入无人机,所述对接固定装置7将新电池固定。
71.本发明的巡检无人机智能换电站及智能换电方法,通过设置无人换电站,通过无人换电站的无人机定位装置以及无人机上的辅助换电模块,可实现对无人机的自动定位,再通过换电池机构可对无人机进行自动换电池,实现无人机的连续作业,无需人工值守。
72.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应
视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。