1.本技术涉及触控技术领域,具体涉及一种触控反馈模组及电子设备。
背景技术:
2.触控反馈模组通常由压电单元和压电单元两侧的铙钹弹片等组装而成,因压电单元在加载驱动信号时发生电致伸缩的形变,进而带动两侧的铙钹弹片发生扩张或压缩,最终将水平方向的伸缩转换成垂直方向的振动。触控反馈模组具有工作频带宽、振动强度大以及功耗低等特点,可与触控屏幕相结合,以提供接近触控机械按钮的真实点击反馈效果。
3.在实现本技术的过程中,发明人发现现有技术中至少存在如下问题:触控反馈模组与触控屏幕相结合时,通常采用环氧树脂胶将其中一侧的铙钹弹片粘合至触控屏幕上,然而,因为铙钹弹片的表面光滑,采用环氧树脂胶粘合时会存在溢胶和胶层厚度不匀的问题。
技术实现要素:
4.鉴于以上内容,有必要提出一种触控反馈模组及电子设备,以解决上述问题。
5.本技术一实施例提供一种触控反馈模组,包括:
6.压电单元,沿所述压电单元的伸缩方向,所述压电单元包括设于所述压电单元两端的连接区、以及位于两个所述连接区之间的功能区;
7.第一弹片,设于所述压电单元的一侧,所述第一弹片的两端分别与所述压电单元两端的所述连接区连接,且所述第一弹片与所述压电单元的所述功能区之间具有间隙;
8.第二弹片,设于所述压电单元背离所述第一弹片的一侧,所述第二弹片的两端分别与所述压电单元两端的所述连接区连接,且所述第二弹片与所述压电单元的所述功能区之间具有间隙;及
9.预紧单元,设于所述第一弹片背离所述压电单元的一侧,和/或所述第二弹片背离所述压电单元的一侧,所述预紧单元可施加预紧力于所述第一弹片和/或所述第二弹片。
10.上述触控反馈模组,通过在第一弹片背离压电单元的一侧和/或第二弹片背离压电单元的一侧设置预紧单元,触控反馈模组可通过预紧单元与外部单元相连接,避免因采用环氧树脂胶将第一弹片或第二弹片与外部单元进行粘合而造成的溢胶和胶层厚度不匀的问题,有效提高触控反馈模组与外部单元的贴合强度。预紧单元可施加预紧力于第一弹片和/或第二弹片,第一弹片和/或第二弹片受到预紧力而处于被压缩状态,处于被压缩状态的第一弹片和/或第二弹片则进一步使得压电单元处于微拉伸应力状态,当加载驱动信号时,沿压电单元的伸缩方向,压电单元产生极短的伸缩位移,然而第一弹片和第二弹片内部则会在触控反馈模组的振动方向上产生较大的压缩应力和扩张应力,进而转换并产生远大于压电单元的极短的伸缩位移的压缩位移和扩张位移,从而进一步提高触控反馈模组的触觉反馈的强度。另外,由于预紧单元具有预紧力,触控模组在停振时,具有预紧力的预紧单元能够使第一弹片和第二弹片快速恢复至原始状态,从而使得触控反馈模组的振感干脆
利落。其中,压电单元产生伸长位移时,第一弹片和第二弹片对应的产生压缩位移;压电单元产生收缩位移时,第一弹片和第二弹片对应的产生扩张位移。
11.在一些实施例中,每个所述预紧单元均包括连接件及弹性件,所述连接件的一端活动贯穿相对应弹片且被挡止于相对应弹片与所述压电单元之间的所述间隙中,所述弹性件套设于所述连接件的外侧且所述弹性件位于相对应弹片背离所述压电单元的一侧,所述弹性件背离相对应弹片的一端被挡止于所述连接件或外部单元,以使所述弹性件被压缩而产生预紧力。
12.如此,预紧单元通过满足上述结构,有利于通过弹性件实现对第一弹片和/或第二弹片施加预紧力。
13.在一些实施例中,所述弹性件背离相对应弹片的一端与所述连接件固定连接。
14.如此,通过将弹性件背离相对应弹片的一端与连接件固定连接,实现连接件对弹性件的挡止作用,以使弹性件能够被压缩。
15.在一些实施例中,每个所述预紧单元均还包括一限位件,所述限位件设于所述连接件,所述弹性件位于所述限位件与相对应弹片之间。
16.如此,通过在连接件上设置限位件,实现连接件对弹性件的挡止作用,以使弹性件被压缩。
17.在一些实施例中,所述第一弹片和/或所述第二弹片上设有两个所述预紧单元,两个所述预紧单元中的所述限位件之间相连接。
18.如此,一方面,限位件仍然可以实现连接件对弹性件的挡止作用;另一方面,通过将两个限位件连接起来,使得两个预紧单元连接为一个整体,当其中一个预紧单元受到负载力的时候,可以带动另一个预紧单元一起运动,避免相对应弹片上的预紧单元发生分别运动的情况,而使得相对应弹片的表面受力不平衡发生损坏,有利于保证触控反馈模组的正常使用。
19.在一些实施例中,所述连接件包括杆部和端部,所述杆部的一端活动贯穿相对应弹片且与所述端部相连接,所述端部位于相对应弹片与所述压电单元之间的间隙中,所述端部沿与所述杆部的活动方向相垂直的方向,至少部分所述端部凸伸于所述杆部。
20.如此,连接件通过设置杆部和端部,实现连接件活动贯穿相对应弹片的一端被挡止于相对应弹片与压电单元之间的间隙中,从而实现通过弹性件对第一弹片和/或第二弹片施加预紧力。
21.在一些实施例中,所述第一弹片和/或所述第二弹片上设有两个所述预紧单元,两个所述预紧单元中活动贯穿相对应弹片的所述连接件的一端之间通过一挡止件连接。
22.如此,通过一挡止件连接两个预紧单元中活动贯穿相对应弹片的连接件的一端,实现连接件活动贯穿相对应弹片的一端被挡止于相对应弹片与压电单元之间的间隙中,从而实现通过弹性件对第一弹片和第二弹片施加预紧力。
23.本技术一实施例还提供一种电子设备,包括:
24.壳体;
25.触控屏,设于所述壳体;及
26.如上所述的触控反馈模组,设于所述壳体,所述触控反馈模组中的任一所述预紧单元背离相对应弹片的一端与所述触控屏连接。
27.上述电子设备的触控反馈模组,通过在第一弹片背离压电单元的一侧和/或第二弹片背离压电单元的一侧设置预紧单元,触控反馈模组可通过预紧单元与触控屏相连接,避免因采用环氧树脂胶将第一弹片或第二弹片与触控屏进行粘合而造成的溢胶和胶层厚度不匀的问题,有效提高触控反馈模组与触控屏的贴合强度。预紧单元可施加预紧力于第一弹片和/或第二弹片,第一弹片和/或第二弹片受到预紧力而处于被压缩状态,处于被压缩状态的第一弹片和/或第二弹片则进一步使得压电单元处于微拉伸应力状态,当加载驱动信号时,沿压电单元的伸缩方向,压电单元产生极短的伸缩位移,然而第一弹片和/或第二弹片内部则会在触控反馈模组的振动方向上产生较大的压缩应力和扩张应力,进而转换并产生远大于压电单元的极短的伸缩位移的压缩位移和扩张位移,从而进一步提高触控反馈模组的触觉反馈的强度。另外,由于预紧单元具有预紧力,触控模组在停振时,具有预紧力的预紧单元能够使第一弹片和第二弹片快速恢复至原始状态,从而使得触控反馈模组的振感干脆利落。
28.在一些实施例中,所述第一弹片和所述第二弹片上均设有所述预紧单元,所述预紧单元背离所述第二弹片的一端通过一支撑件与所述壳体连接,所述预紧单元背离所述第一弹片的一端与所述触控屏连接。
29.如此,预紧单元背离第二弹片的一端通过支撑件与壳体连接,有利于实现触控反馈模组与壳体之间的连接,增强触控反馈模组与壳体之间的贴合强度。
30.在一些实施例中,所述预紧单元背离所述第一弹片的一端通过一传导件与所述触控屏连接,所述传导件的一端与所述触控屏连接,所述传导件的另一端开设有凹槽,所述预紧单元背离所述第一弹片的一端延伸至所述凹槽内。
31.如此,通过传导件连接预紧单元背离第一弹片弹片的一端与触控屏,有利于实现触控反馈模组与触控屏的连接以及负载力的传导。
附图说明
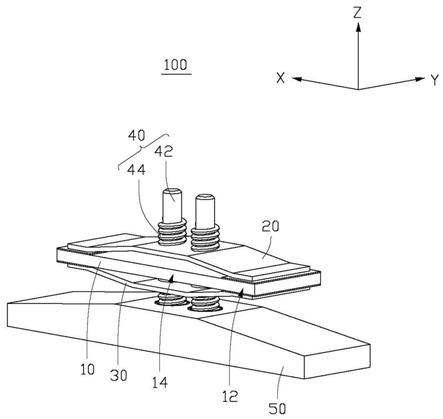
32.图1是本技术第一实施例提供的触控反馈模组的立体示意图。
33.图2是图1所示的触控反馈模组的分解示意图。
34.图3是图1所示的触控反馈模组的主视示意图。
35.图4是本技术第二实施例提供的触控反馈模组的主视示意图。
36.图5是本技术第三实施例提供的触控反馈模组的主视示意图。
37.图6是本技术第四实施例提供的触控反馈模组的主视示意图。
38.图7是本技术第五实施例提供的触控反馈模组的主视示意图。
39.图8是本技术第六实施例提供的触控反馈模组的主视示意图。
40.图9是本技术第七实施例提供的电子设备的立体示意图。
41.图10是图9所示的电子设备沿a
‑
a方向的剖面图。
42.图11是本技术第八实施例提供的电子设备的剖面图。
43.主要元件符号说明
44.电子设备
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1000、2000
45.触控反馈模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100、200、300、400、500、600
46.压电单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
47.连接区
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
48.功能区
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
49.第一弹片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
50.第二弹片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
51.预紧单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
52.连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
53.杆部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
422
54.端部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
424
55.弹性件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
44
56.限位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
46
57.挡止件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
48
58.支撑件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
59.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
700
60.触控屏
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
800
61.传导件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
900
62.凹槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
910
具体实施方式
63.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
64.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
65.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
66.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
67.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。本文所实用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
68.下面结合附图,对本技术的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互结合。
69.请参见图1,图1为本技术第一实施例提供的触控反馈模组的立体示意图。触控反馈模组100用于为用户提供振动触觉反馈等功能。触控反馈模组100包括压电单元10、第一弹片20、第二弹片30及预紧单元40。
70.沿压电单元10的伸缩方向,压电单元10包括设于压电单元10两端的连接区12、以及位于两个连接区12之间的功能区14;第一弹片20设于压电单元10的一侧,第一弹片20的两端分别与压电单元10两端的连接区12连接,且第一弹片20与压电单元10的功能区14之间具有间隙;第二弹片30设于压电单元10背离第一弹片20的一侧,第二弹片30的两端分别与压电单元10两端的连接区12连接,且第二弹片30与压电单元10的功能区14之间具有间隙;预紧单元40设于第一弹片20背离压电单元10的一侧,和/或第二弹片30背离压电单元10的一侧,预紧单元40可施加预紧力于第一弹片20和/或第二弹片30。
71.需要说明的是,压电单元10的伸缩方向为如图1所示的x轴,压电单元10的伸缩方向表示压电单元10在加载驱动信号时,压电单元10发生电致伸缩的方向,如图1所示的z轴则表示第一弹片20和/或第二弹片30的振动方向,即触控反馈模组100的振动方向,压电单元10的伸缩方向与第一弹片20和/或第二弹片30的振动方向相垂直。
72.上述触控反馈模组100,通过在第一弹片20背离压电单元10的一侧和/或第二弹片30背离压电单元10的一侧设置预紧单元40,触控反馈模组100可通过预紧单元40与外部单元(图1未示出)相连接,避免因采用环氧树脂胶将触控反馈模组100的第一弹片20或第二弹片30与外部单元进行粘合而造成的溢胶和胶层厚度不匀的问题,防止在进行跌落或过载测试时发生脱落,有效避免了在贴合制程中存在的问题,能够有效提高触控反馈模组100与外部单元的贴合强度以及可靠性。其中,外部单元可以为触控屏(如图7所示)。
73.上述触控反馈模组100中的预紧单元40可施加预紧力于第一弹片20和/或第二弹片30,第一弹片20和/或第二弹片30受到预紧力而处于被压缩状态,处于被压缩状态的第一弹片20和/或第二弹片30则进一步使得压电单元10处于微拉伸应力状态,即,使得压电单元10在伸缩方向处于微拉伸应力状态。当加载驱动信号时,沿压电单元10的伸缩方向,压电单元10因逆压电效应而产生极短的伸长和收缩位移,然而,第一弹片20和第二弹片30内部则会在触控反馈模组100的振动方向上产生较大的压缩应力和扩张应力,进而转换并产生远大于压电单元10的极短的伸缩位移的压缩位移和扩张位移,使得触控反馈模组100具有更强的振动,从而进一步提高触控反馈模组100的触觉反馈的强度。另外,由于预紧单元40具有预紧力,触控反馈模组100在停振时,具有预紧力的预紧单元40能够使第一弹片20和第二弹片30快速恢复至原始状态,从而使得触控反馈模组100的振感干脆利落。
74.请一并参见图2和图3,本实施例中,压电单元10为薄膜状,压电单元10可以为压电薄膜、压电陶瓷等能够产生正压电效应和逆压电效应的单元。其中,压电单元10的连接区12通过环氧树脂胶、固定胶、双面胶等连接方式分别与第一弹片20和第二弹片30的两端固定连接,压电单元10的功能区14主要起到在加载驱动信号时发生电致伸缩。
75.本实施例中,第一弹片20和第二弹片30的结构相似,第一弹片20和第二弹片30可以为铙钹弹片,第一弹片20和第二弹片30大致为拱形结构,第一弹片20和第二弹片30的两端分别与压电单元10的连接区12固定连接,第一弹片20和第二弹片30的中间区域则分别与
压电单元10的功能区14之间形成间隙,以使得第一弹片20和第二弹片30的中间区域均与压电单元10的功能区14间隔设置,该间隙可用于形成第一弹片20和第二弹片30的振动空间。
76.本实施例中,预紧单元40的数量为四个,第一弹片20和第二弹片30上分别设置两个预紧单元40,沿触控反馈模组100的振动方向,预紧单元40分别朝向背离第一弹片20和第二弹片30的方向延伸。
77.可以理解地,第一弹片20和第二弹片30上也可以分别设置一个、三个、四个或更多个预紧单元40。第一弹片20上的预紧单元40的数量和第二弹片30上预紧单元40的数量可以相等也可以不相等。
78.预紧单元40施加于相对应第一弹片20上的预紧力与施加于相对应第二弹片30上的预紧力相等。如此,通过满足预紧单元40施加于第一弹片20的预紧力与施加于第二弹片30的预紧力相等,从而使得第一弹片20、第二弹片30及压电单元10处于平衡状态,避免因其中一侧的预紧力过大或过小,而造成压电单元10向一侧翘边的问题,进一步避免压电单元10与第一弹片20和/或第二弹片30之间发生脱胶失效的问题。
79.每个预紧单元40均包括连接件42及弹性件44,连接件42的一端活动贯穿相对应弹片且被挡止于相对应弹片与压电单元10之间的间隙中,连接件42的另一端则与外部单元相连接,弹性件44套设于连接件42的外侧且弹性件44位于相对应弹片背离压电单元10的一侧,弹性件44背离相对应弹片的一端被挡止于连接件42或外部单元,以使弹性件44被压缩而产生预紧力。
80.可以理解地,在其他的实施例中,弹性件44还可以邻近连接件42设置。
81.具体地,以第一弹片20及第一弹片20上的一个预紧单元40为例详细说明本实施例的结构及动作过程,可以理解地,第一弹片20及第一弹片20上的另一个预紧单元40、第二弹片30及第二弹片30上的任一个预紧单元40的结构及动作过程均与被详细说明的第一弹片20及第一弹片20上的一个预紧单元40的结构及动作过程相同。连接件42大致为杆状,弹性件44具有弹性且可伸缩,弹性件44可以为但不限于为弹簧、圆筒状弹性橡胶等。第一弹片20上开设有允许连接件42贯穿的通孔,连接件42的一端活动贯穿第一弹片20并延伸至第一弹片20与压电单元10之间的间隙中,且连接件42活动贯穿第一弹片20的一端还被挡止于第一弹片20与压电单元10之间的间隙中,连接件42的另一端与外部单元相连接;弹性件44套设于连接件42的外侧且位于第一弹片20背离压电单元10的一侧,弹性件44背离第一弹片20的一端被挡止于连接件42,从而使得弹性件44被压缩而产生预紧力,即弹性件44被压缩而产生弹力。
82.由于连接件42的一端被挡止于第一弹片20与压电单元10之间的间隙中,从而使得连接件42不会因弹性件44施加预紧力于第一弹片20而脱离第一弹片20;另外,由于弹性件44背离第一弹片20的一端被挡止于连接件42上,所以,弹性件44始终处于被压缩状态,进而弹性件44施加预紧力于第一弹片20,使得自然状况下,第一弹片20在触控反馈模组100的振动方向上产生压缩应力。
83.当施加负载力于连接件42背离第一弹片20的一端时,连接件42在负载力的作用下会朝靠近压电单元10的方向运动,从而连接件42靠近压电单元10的一端会朝靠近压电单元10的方向运动,即连接件42被挡止于第一弹片20与压电单元10之间的间隙中的部分会离开第一弹片20朝靠近压电单元10的方向运动;由于弹性件44背离第一弹片20的一端被挡止于
连接件42上,弹性件44会跟随连接件42一起朝靠近压电单元10的方向运动,然而,由于弹性件44靠近第一弹片20的一端被第一弹片20所挡止,所以,弹性件44此时会被压缩并进一步施加弹力于第一弹片20,第一弹片20则会在弹力的作用下在触控反馈模组100的振动方向上产生更大的压缩应力,进而带动压电单元10产生沿压电单元10的伸缩方向的伸长位移,压电单元10产生电压信号,然后给压电单元10加载驱动信号,压电单元10在驱动信号的作用下发生电致伸缩,带动第一弹片20产生振动。
84.当用户不再施加负载力于第一弹片20时,连接件42不再受到外力的作用,压电单元10不再产生电压信号,也就不再给压电单元10加载驱动信号,第一弹片20开始停振过程。此时,触控反馈模组100中仅弹性件44具有弹力,而弹性件44则会朝着恢复初始状态的趋势运动,即处于压缩状态的弹性件44迅速推动第一弹片20恢复至初始的预紧平衡状态,从而使得第一弹片20的振动停止,缩短了触控反馈模组100的停振时间。
85.在一实施方式中,弹性件44背离第一弹片20的一端与连接件42固定连接。具体地,弹性件44背离第一弹片20的一端与连接件42可通过焊接、固定胶、双面胶等连接方式固定连接。
86.可以理解地,在其他的实施方式中,弹性件44背离第一弹片20的一端还可以直接与外部单元连接,外部单元受力发生形变并进一步挤压连接件42时,弹性件44跟随连接件42一起运动,弹性件44受到第一弹片20的挡止作用而进一步被压缩。需要注意的是,弹性件44与外部单元直接连接时,在自然状况下,弹性件44同样处于被压缩状态。
87.连接件包括杆部422和端部424,杆部422的一端活动贯穿第一弹片20且与端部424相连接,端部424位于第一弹片20与压电单元10之间的间隙中,端部424沿与杆部422的活动方向相垂直的方向,至少部分端部424凸伸于杆部422。
88.可以理解地,当施加负载力于杆部422背离第一弹片20的一端时,杆部422在负载力的作用下会带动端部424朝靠近压电单元10的方向运动,从而杆部422靠近压电单元10的一端以及端部424会朝靠近压电单元10的方向运动,即端部424会离开第一弹片20朝靠近压电单元10的方向运动,从而在一个时间段内,端部424靠近第一弹片20的一侧与第一弹片20之间会产生间隙,该间隙又很快因弹性件44的弹性作用而变小直至消失。
89.在一实施方式中,杆部422和端部424可以为圆柱形结构,端部424在第一弹片20上的投影面积大于杆部422在第一弹片20上的投影面积。如此,通过端部424的面积大于杆部422的面积,使得连接件42靠近压电单元10的一端被挡止于第一弹片20与压电单元10之间的间隙中,从而实现通过弹性件44对第一弹片20和第二弹片30施加预紧力。
90.可以理解地,在其他的实施例中,杆部422可以为圆柱形结构,端部424可以为柱形结构,且端部424的两端凸伸于杆部422,如此,端部424同样可以起到挡止的作用;或杆部422可以为圆柱形结构,端部424为三棱柱结构,且杆部424的圆形截面为端部424的三角形截面的内切圆,如此,端部424同样可以起到挡止的作用。可以理解地,杆部422还可以为三棱柱形、四棱柱形、五棱柱形或其他柱状结构,端部424可以为三棱柱形、四棱柱形、五棱柱形、条形结构或其他结构,部分端部424仍需凸伸于杆部422,如此,端部424可以起到挡止的作用。
91.本实施例中,触控反馈模组100还可以包括支撑件50。支撑件50与预紧单元40中的连接件42背离第一弹片20的一端或预紧单元40中的连接件42背离第二弹片30的一端连接,
支撑件50具有支撑、承载的作用。具体地,本实施例中,支撑件50与预紧单元40中的连接件42背离第二弹片30的一端连接,相应地,预紧单元40中的连接件42背离第一弹片20的一端则与外部单元连接。如此,本实施例的触控反馈模组100通过支撑件50与外部单元之间相连接,有利于实现触控反馈模组100与外部单元之间的连接,增强触控反馈模组100与外部单元贴合的强度。
92.请参见图4,本技术第二实施例提供了一种触控反馈模组,本实施例提供的触控反馈模组200与第一实施例提供的触控反馈模组100的结构大致相似,不同之处在于:本实施例中,每个预紧单元40均还包括一限位件46,限位件46为一环状结构,限位件46套设于连接件42的外侧,弹性件44位于限位件46与相对应弹片之间。如此,通过限位件46对弹性件44的限位作用,使得弹性件44背离相对应弹片的一端被挡止于连接件42,从而实现弹性件44被压缩而产生预紧力。
93.可以理解地,在其他的实施例中,限位件46还可以大致为块状,限位件46的数量可以为一个也可以为多个,均设于连接件42的外侧,通过块状结构的限位件46同样可以起到对弹性件44的限位作用。
94.可以理解地,在其他的实施例中,当相对应弹片上的预紧单元40的数量多于一个时,多个连接件42上的限位件46之间可以相互连接,以使多个预紧单元40连接为一个整体,当其中一个预紧单元40受到负载力的时候,可以带动相对应弹片上的所有的预紧单元40一起运动,避免相对应弹片上的预紧单元40分别运动而使相对应弹片的表面受力不平衡发生损坏,保证触控反馈模组200的正常使用。
95.请参见图5,本技术第三实施例提供了一种触控反馈模组,本实施例提供的触控反馈模组300与第一实施例提供的触控反馈模组100的结构大致相似,不同之处在于:本实施例中,相对应弹片上的两个连接件42活动贯穿相对应弹片的一端之间通过一挡止件48连接。挡止件48大致为一杆状,挡止件48的两端分别与两个连接件42活动贯穿相对应弹片的一端连接。如此,通过挡止件48连接两个连接件42活动贯穿相对应弹片的一端,实现两个连接件42同时活动贯穿相对应弹片的一端被挡止于相对应弹片与压电单元10之间的间隙中,从而实现通过两个弹性件44同时对第一弹片20和第二弹片30施加预紧力。
96.可以理解地,当第一弹片20和第二弹片30上的预紧单元40的数量为三个、四个或更多个时,三个、四个或更多个连接件42活动贯穿相对应弹片的一端之间也可以通过挡止件48进行连接,从而实现对连接件42活动贯穿相对应弹片的一端的挡止作用。
97.请参见图6,本技术第四实施例提供了一种触控反馈模组,本实施例提供的触控反馈模组400与第一实施例提供的触控反馈模组100的结构大致相似,不同之处在于:本实施例中,第一弹片20和第二弹片30上均设置有一个预紧单元40,预紧单元40中的连接件42包括杆部422和端部424,预紧单元40中的弹性件44背离相对应弹片的一端与相对应连接件42固定连接。如此,通过分别在第一弹片20和第二弹片30上设置一个预紧单元40,同样可以避免触控反馈模组400通过环氧树脂胶与外部单元粘合而产生的溢胶和胶层厚度不匀的问题;还能够提升触控反馈模组400的触觉反馈的强度,以及使得触控反馈模组400的振感干脆利落。
98.请参见图7,本技术第五实施例提供了一种触控反馈模组。本实施例提供的触控反馈模组500与第一实施例提供的触控反馈模组100的结构大致相似,不同之处在于:本实施
例中,触控反馈模组500仅在第一弹片20上设置两个预紧单元40,预紧单元40中的连接件42包括杆部422和端部424,预紧单元40中的弹性件44背离相对应弹片的一端与相对应连接件42固定连接。触控反馈模组500通过预紧单元40与外部单元相连接。如此,通过仅在第一弹片20上设置两个预紧单元40,同样可以避免触控反馈模组500通过环氧树脂胶与外部单元粘合而产生的溢胶和胶层厚度不匀的问题;还能够提升触控反馈模组500的触觉反馈的强度,以及使得触控反馈模组500的振感干脆利落。
99.请参见图8,本技术第六实施例提供了一种触控反馈模组。本实施例提供的触控反馈模组600与第一实施例提供的触控反馈模组100的结构大致相似,不同之处在于:本实施例中,触控反馈模组600中的限位件46大致为杆状结构,每个限位件46分别设于相应的连接件42上,第一弹片20上的两个预紧单元40的限位件46之间相连接,第二弹片30上的两个预紧单元40的限位件46之间相连接。如此,通过限位件46以及将限位件46相连接,一方面,限位件46仍然能实现连接件42对弹性件44的限位作用;另一方面,使同侧的两个预紧单元40连接为一个整体,当其中一个预紧单元40受到负载力的时候,可以带动同侧的两个预紧单元40一起运动,避免相对应弹片上的预紧单元40分别运动而使相对应弹片的表面受力不平衡发生损坏,保证触控反馈模组600的正常使用。
100.可以理解地,在其他的实施例中,相对应弹片上还可以设置三个、四个、五个或更多个预紧单元40,同样可以将三个、四个、五个或更多个限位件46之间相连接,使得三个、四个、五个或更多个预紧单元40连接为一个整体,保证触控反馈模组600的正常使用。
101.请参见图9,本技术第七实施例提供了一种电子设备。电子设备1000包括壳体700、触控屏800以及第一实施例至第六实施例中的任一触控反馈模组,本实施例以第一实施例中的触控反馈模组100为例进行说明。触控屏800具有触控显示作用,触控屏800及触控反馈模组100均设于壳体700,触控反馈模组100中,预紧单元40中的连接件42背离第一弹片20的一端与触控屏800连接,预紧单元40中的连接件42背离第二弹片30的一端通过支撑件50与壳体700连接。
102.上述电子设备1000中的触控反馈模组100,通过在第一弹片20背离压电单元10的一侧以及第二弹片30背离压电单元10的一侧分别设置预紧单元40,触控反馈模组100可通过预紧单元40与触控屏800相连接,避免因采用环氧树脂胶将触控反馈模组100的第一弹片20与触控屏800进行粘合而造成的溢胶和胶层厚度不匀的问题,防止在进行跌落或过载测试时发生脱落,有效避免了在贴合制程中存在的问题,能够有效提高触控反馈模组100与外部单元的贴合强度以及可靠性。
103.上述电子设备1000中的预紧单元40可分别施加预紧力于第一弹片20和第二弹片30,第一弹片20和第二弹片30受到预紧力而处于被压缩状态,处于被压缩状态的第一弹片20和第二弹片30则进一步使得压电单元10处于微拉伸应力状态,即,使得压电单元10在伸缩方向处于微拉伸应力状态。当加载驱动信号时,沿压电单元10的伸缩方向,压电单元10因逆压电效应而产生极短的伸长和收缩位移,然而第一弹片20和第二弹片30内部则会在触控反馈模组100的振动方向上产生更大的压缩应力和扩张应力,进而转换并产生远大于压电单元10的极短的收缩位移的压缩位移和扩张位移,使得触控反馈模组100具有更强的振动,从而进一步提高触控反馈模组100的触觉反馈的强度,即提高电子设备1000的触觉反馈的强度。另外,由于预紧单元40具有预紧力,触控反馈模组100在停振时,具有预紧力的预紧单
元40能够使第一弹片20和第二弹片30快速恢复至原始状态,从而使得触控反馈模组100的振感干脆利落。
104.在本实施例中,电子设备1000包括但不限于手机、车载中控屏、笔记本电脑等,触控反馈模组100能够实现触控振动反馈等功能。
105.请一并参见图10,本实施例中,预紧单元40中的连接件42背离第一弹片20的一端通过一传导件900与触控屏800连接,传导件900的一端为平面状并与触控屏800连接,传导件900的另一端开设有凹槽910,即传导件900可以理解为一端封闭、一端开口的圆筒状结构,预紧单元40中连接件42背离第一弹片20的一端延伸至凹槽910内并与传导件900固定连接,固定连接时,可在凹槽910内填充胶水,以实现传导件900与连接件42之间的固定连接。如此,通过传导件900连接预紧单元40中连接件42背离第一弹片20的一端与触控屏800,有利于实现预紧单元40与触控屏800的连接,还可以通过传导件900将负载力传导至连接件42上。
106.可以理解地,在其他的实施例中,传导件900还可以为圆柱状,传导件900的两端分别与触控屏800和连接件42背离第一弹片20的一端连接。
107.可以理解地,在其他的实施例中,电子设备1000中,支撑件50可以省略,第二弹片30上的预紧单元40背离第二弹片30的一端直接与壳体700连接。
108.请参见图11,本技术第八实施例提供了一种电子设备,本实施例提供的电子设备2000与第七实施例提供的电子设备1000的结构大致相似,不同之处在于:本实施例中,第一弹片20上的预紧单元40中的弹性件44背离第一弹片20的一端与传导件900相连接,即弹性件44被挡止于外部单元(传导件900)。如此,弹性件44能够被压缩而产生预紧力。
109.可以理解地,在其他的实施例中,第一弹片20上的预紧单元40中的弹性件44背离第一弹片20的一端还可以直接与触控屏800相连接。如此,弹性件44仍然可以被压缩而产生预紧力。
110.对于本领域技术人员而言,显然本技术不限于上述示范性实施例的细节,而且在不背离本技术的精神或基本特征的情况下,能够以其他的具体形式实现本技术。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本技术的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本技术内。
111.最后应说明的是,以上实施例仅用以说明本技术的技术方案而非限制,尽管参照较佳实施例对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

