立体种植视频监控系统
【技术领域】
1.本技术涉及一种立体种植视频监控系统,属于监控设备技术领域。
背景技术:
2.现阶段的植物大棚监控技术主要是机器人巡检型监控,巡检机器人操作复杂,必须重复升降摄像头才能拍到完整有效的照片,相机定位效果差且很难拍到每一株植物的细节,对后续的植物病虫害识别工作展开不利。
3.机器人底座成本高、实际情况需要更多摄像机,且在摄像数据处理方面没有进行二次处理,拍摄所得照片全部上传服务器,工作量大,有效照片比率小。另一方面大型植物农场缺少机器人巡检式小车运行所必需的水泥浇筑地等环境条件。同时,现有的导轨式摄像移动方向单一、灵活度不强,难以全面拍摄。
4.因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现要素:
5.本技术的目的在于提供一种立体种植视频监控系统,其易操作,且稳定性好,在能够降低成本的同时还能够提高拍摄照片的有效性。
6.本技术的目的是通过以下技术方案实现:一种立体种植视频监控系统,包括监控装置及与所述监控装置信号连接的服务器,所述服务器设置有图像处理模块,所述监控装置用以获取目标物的有效图片并上传至所述服务器,所述服务器接收所述有效图片并对所述有效图片进行处理;
7.其中,所述监控装置包括架体及设置在所述架体上的监控机构,所述监控机构可对相对于所述架体不同高度的目标物进行拍摄,以获取所述有效图片。
8.在其中一个实施例中,所述监控机构仅设置有一个,所述监控机构可沿所述架体的高度方向移动。
9.在其中一个实施例中,所述监控机构设置有至少两个,至少两个所述监控机构沿所述架体的高度方向排布。
10.在其中一个实施例中,所述监控机构包括:
11.摄像头,可相对基座移动;以及
12.移动机构,与所述摄像头连接,以驱动所述摄像头按照预设方向移动。
13.在其中一个实施例中,所述移动机构包括:
14.第一移动组件,与所述摄像头连接,驱动所述摄像头沿第一方向移动;以及
15.第二移动组件,与所述第一移动组件连接,驱动所述摄像头沿第二方向移动;
16.其中,所述第一方向和第二方向不平行设置。
17.在其中一个实施例中,所述第一移动组件包括沿第一方向设置在所述基座上的第一导轨、与所述第一导轨适配的第一移动块、及用以驱动所述第一移动块可相对于所述第一导轨产生位移的第一驱动件。
18.在其中一个实施例中,所述第二移动组件包括沿第二方向设置在所述基座上的第二导轨、与所述第二导轨适配的第二移动块、及用以驱动所述第二移动块可相对于所述第二导轨产生位移的第二驱动件,所述第二驱动件与所述第一导轨连接。
19.在其中一个实施例中,所述监控机构还设置有控制芯片,所述控制芯片与所述服务器进行数据传输。
20.与现有技术相比,本技术具有如下有益效果:通过设置架体和监控机构,监控机构可相对于架体移动以对目标物进行拍摄,从而获取有效图片,同时将有效图片上传至服务器进行图像处理,易操作且稳定性好,还能够降低成本。
【附图说明】
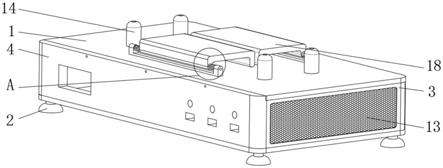
21.图1是本技术的立体种植视频监控系统的结构示意图。
22.图2是图1中的监控机构的结构示意图。
23.图3是图3中的第一移动组件和摄像头的结构示意图。
24.图4是图3中的第二移动组件的结构示意图。
【具体实施方式】
25.为使本技术的上述目的、特征和优点能够更为明显易懂,下面结合附图,对本技术的具体实施方式做详细的说明。可以理解的是,此处所描述的具体实施例仅用于解释本技术,而非对本技术的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分而非全部结构。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
26.本技术中的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
27.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
28.请参阅图1至图4所示,本技术的一较佳实施例中的一种立体种植视频监控系统,包括监控装置及与监控装置信号连接的服务器,监控装置用以对目标物进行拍摄,进而将拍摄的照片上传至服务器内。其中,监控装置拍摄的目标物照片为有效照片。有效照片的定义为:能够依据照片上的图片,清晰辨别目标物形状、颜色等特征。
29.而服务器设置有图像处理模块,监控装置用以获取目标物的有效图片并上传至服务器,服务器接收有效图片并对有效图片进行处理。具体处理过程为现有技术,在此不做赘述。
30.其中,所述监控装置包括架体10及设置在所述架体10上的监控机构20,所述监控机构20可对相对于所述架体10不同高度的目标物进行拍摄,以获取所述有效图片。监控机构20设置有控制芯片,控制芯片与服务器进行数据传输。该控制芯片可以为stm32,亦可以
为其他,在此不做具体限定,根据实际情况而定。
31.在其中一个实施例中,监控机构20仅设置有一个,监控机构20可沿架体10的高度方向移动。即,监控机构20和架体10的其中一个上设置有滑轨,监控机构20和架体10的另一个设置有与滑轨滑动配合的滑块,此时监控机构20还配置有驱动机构,该驱动机构驱动监控机构20通过滑块沿滑轨移动,进而实现监控机构20的高度调节。
32.在另一个实施例中,监控机构20设置有至少两个,至少两个监控机构 20沿架体10的高度方向排布。即,至少两个监控机构20沿架体10的高度方向等距分布。诚然,至少两个监控机构20也可沿架体10的高度方向非等距分布,在此不做具体限定,根据实际情况而定。并且,此时的监控机构20 可固定设置在架体10上,也可相对于架体10移动。
33.在本实施例中,监控机构20设置有三个,三个监控机构20固定设置在架体10上,且沿架体10的高度方向上等距分布,以对目标物进行拍摄。该目标物为大棚内的植物,架体10可架设在植物的上方,亦可以架设在植物的一侧。
34.具体的,每个监控机构20包括:基座1、可相对基座1移动的摄像头2 及与摄像头2连接,以驱动摄像头2按照预设方向移动的移动机构3。而移动机构3包括与摄像头2连接的第一移动组件31以及与第一移动组件31连接的第二驱动组件。第一移动组件31驱动摄像头2沿第一方向移动,第二移动组件32驱动摄像头2沿第二方向移动,第一方向和第二方向不平行设置。在本实施例中,第一方向为箭头a指向,第二方向为箭头b指向,箭头a与箭头b 垂直设置。
35.第一移动组件31包括沿第一方向设置在基座1上的第一导轨311、与第一导轨311适配的第一移动块312、及用以驱动第一移动块312可相对于第一导轨311产生位移的第一驱动件313。第二移动组件32包括沿第二方向设置在基座1上的第二导轨321、与第二导轨321适配的第二移动块322、及用以驱动第二移动块322可相对于第二导轨321产生位移的第二驱动件323,第二驱动件323与第一导轨311连接,第二导轨321通过紧固件设置在基座1上,该紧固件为u型锁扣324。
36.其中,若第一导轨311与第一移动块312啮合,即第一导轨311上设置有齿条,第一移动块312为第一齿轮,第一驱动件313为用以驱动第一齿轮转动的第一马达。若第一导轨311与第一移动块312滑动配合,则第一驱动件313则为用以驱动第一移动块312的丝杠或气缸或电缸等做直线运动的器件。
37.同样的,若第二导轨321与第二移动块322啮合,即第二导轨321上设置有齿条,第二移动块322为第二齿轮,第二驱动件323为用以驱动第二齿轮转动的第二马达。若第二导轨321与第二移动块322滑动配合,则第二驱动件323则为用以驱动第二移动块322的丝杠或气缸或电缸等做直线运动的器件。
38.本实用新型还提供了一种立体种植视频监控方法,采用如上的立体种植视频监控系统,方法包括:
39.接收第一移动指令或第二移动指令;其中,第一移动指令为实际移动指令,第二移动指令为机器设定移动指令;其中,第一移动指令为沿第一方向和/或第二方向移动;第二移动指令为沿第一方向和第二方向移动。
40.控制监控机构20执行第一移动指令或第二移动指令。
41.上述方法具体为:当接收第一移动指令时,控制监控机构20的摄像头2 沿第一移
动指令的具体指令(例如仅沿第一方向移动)移动;当接收第二移动指令时,此时,控制监控机构20的摄像头2沿第一方向和第二方向皆移动。
42.综上所述:通过设置架体10和监控机构20,监控机构20可相对于架体 10移动以对目标物进行拍摄,从而获取有效图片,同时将有效图片上传至服务器进行图像处理,易操作且稳定性好,还能够降低成本。
43.上述仅为本技术的一个具体实施方式,其它基于本技术构思的前提下做出的任何改进都视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。