1.本发明属于电缆剥皮技术领域,具体涉及一种适应不规则电缆外轮廓的电缆剥皮机器人及方法。
背景技术:
2.为了便于对电缆剥皮,市场上出现了各种电缆剥皮装置,主要分为纵切式剥皮装置和环切式剥皮装置两种。中国专利申请号:202110484935.1公开了一种集成纵切环切的电缆剥皮自动化装置,包括纵切装置、环切装置和底座支撑装置三部分。纵切装置和环切装置设计有梯形挡块,且通过底座支撑装置的两套丝杠螺母机构实现纵向方向的进给运动。为了适应不同直径尺寸的电缆的径向方向的固定,在齿轮支撑基板和圆环底板的侧端面上,分别设计了三组小型丝杠螺母固定装置,在螺母的末端设计了内嵌式的双轴承支撑结构,这样在不增加大齿轮尺寸的前提下,增大了切割电缆直径。但是该专利文献侧重于理想圆形电缆剥皮切割,无法适应不规则圆形轮廓电缆的绝缘层与铠装层的均匀切割。本文是在中国专利申请号:202110484935.1的技术方案总体架构基础上进一步的改进。
技术实现要素:
3.为了克服上述现有技术的电缆剥皮自动化装置无法适应不规则圆形轮廓电缆的绝缘层与铠装层的均匀切割的缺点,本发明提出一种适应不规则电缆外轮廓的电缆剥皮机器人及方法。
4.为了达到上述目的,本发明所采取的技术方案为:一种适应不规则电缆外轮廓的电缆剥皮机器人,由底座支撑装置、两套电缆压紧固定机构、纵切装置、环切装置、两套丝杠螺母机构组成,两套电缆压紧固定机构滑动安装在底座支撑装置上,两套电缆压紧固定机构通过底座支撑装置中的两套丝杠螺母机构分别控制纵向移动,其中一套电缆压紧固定机构上安装纵切装置,另一套电缆压紧固定机构上安装环切装置;纵切装置包括纵切刀头旋转模块和纵切刀头径向进给模块,纵切刀头径向进给模块包括纵切刀头进给伺服电机、第一法兰支架、第一小轴承座、第一滑块、第一直线位移传感器、第一丝杠;第一滑块与其中一套电缆压紧固定机构的圆环底板上开设的径向滑槽配合,第一小轴承座通过第一螺钉固定到圆环底板上,第一法兰支架与第一小轴承座固定连接,纵切刀头进给伺服电机与第一法兰支架固定连接,纵切刀头进给伺服电机的输出轴通过第一联轴器连接第一丝杠,第一丝杠上安装有第一t型螺母,第一t型螺母与第一滑块通过第二螺钉固定连接,第一滑块中安装有第一直线位移传感器;纵切刀头旋转模块与第一滑块固定连接,纵切刀头旋转模块和第一滑块与圆环底板构成径向滑动副。
5.作为优选,所述纵切刀头旋转模块包括纵切刀头旋转伺服电机、纵切刀头以及第一螺母,纵切刀头旋转伺服电机与第一滑块的阶梯止口配合并固定,纵切刀头通过第一螺母与纵切刀头旋转伺服电机的输出轴固定。
6.作为优选,所述第一直线位移传感器安装有球形探针,第一直线位移传感器和纵
切刀头平面经过圆心的同一个纵向截面。
7.作为优选,所述环切装置包括环切刀头旋转模块和环切刀头径向进给模块,环切刀头径向进给模块包括环切刀头进给伺服电机、第二法兰支架、第二小轴承座、第二滑块、第二直线位移传感器、第二丝杠;第二滑块与另一套电缆压紧固定机构的圆环底板上开设的径向滑槽配合,第二小轴承座通过第三螺钉固定到圆环底板上,第二法兰支架与第二小轴承座固定连接,环切刀头进给伺服电机与第二法兰支架固定连接,环切刀头进给伺服电机的输出轴通过第二联轴器连接第二丝杠,第二丝杠上安装有第二t型螺母,第二t型螺母与第一滑块通过第四螺钉固定连接,第二滑块中安装有第二直线位移传感器。环切刀头旋转模块与第二滑块固定连接,环切刀头旋转模块和第二滑块与圆环底板构成径向滑动副。
8.作为优选,所述环切刀头旋转模块包括环切刀头旋转伺服电机、环切刀头以及第二螺母,环切刀头旋转伺服电机与第二滑块的阶梯止口配合并固定,环切刀头通过第二螺母与环切刀头旋转伺服电机的输出轴固定。
9.作为优选,所述第二直线位移传感器安装有球形探针,第二直线位移传感器和环切刀头平面经过圆心的同一个纵向截面。
10.作为优选,所述环切刀头的位置与纵切刀头的位置相比旋转了90度。
11.本发明还提供了一种适应不规则电缆外轮廓的电缆剥皮方法,电缆伸入两套电缆压紧固定机构的中心孔中,根据切割位置需要,通过两套丝杠螺母机构调节两套电缆压紧固定机构的间距,即调节纵切装置和环切装置的距离,然后通过纵切装置纵切电缆绝缘层,通过环切装置环切绝缘层,切割过程中:纵切刀头进给伺服电机带动第一丝杠旋转时,第一t型螺母、第一滑块、纵切刀头、纵切刀头旋转伺服电机四者一起径向方向运动;以电缆的标称外径作为基准,在笛卡尔坐标系下,纵向方向采用接触式的带球形探针的第一直线位移传感器测量在y方向的变化量;第一直线位移传感器采集的y坐标变化数据,经plc控制系统或者pc上位机进行运动控制、数据采集、数据分析,以图形、表格方式显示测量电缆外轮廓沿纵向方向的y坐标数据点;通过第一直线位移传感器的探头检测电缆实际轮廓与理想轮廓在y方向的实际距离,当实际轮廓与理想轮廓在空间位置重合时,纵切刀头进给伺服电机停止动作;当实际轮廓大于理想轮廓时,纵切刀头进给伺服电机驱动第一滑块远离电缆中心方向运动;当实际轮廓小于理想轮廓时,纵切刀头进给伺服电机驱动第一滑块靠近电缆中心方向运动;从而保证纵切刀头运动轨迹与电缆实际外圆轮廓曲线重合;环切刀头进给伺服电机带动第二丝杠旋转时,第二t型螺母、第二滑块、环切刀头、环切刀头旋转伺服电机四者一起径向方向运动;以圆环底板的中心轴作为回转测量基准,在圆环底板确定r轴的零线位置,圆形光栅码盘固定到圆环底板上,在极坐标系下,径向方向采用接触式的带球形探针的第二直线位移传感器测量径向变化量;第二直线位移传感器采集的角度坐标数据,经plc控制系统或者pc上位机进行运动控制、数据采集、数据分析,以图形、表格方式显示测量电缆外轮廓沿圆周方向的极坐标数据点;通过第二直线位移传感器的探头检测电缆实际轮廓与理想轮廓在径向方向的实际距离,当实际轮廓与理想轮廓在空间位置重合时,环切刀头进给伺服电机停止动作;当实际轮廓大于理想轮廓时,环切刀头进给伺服电机驱动第二滑块远离电缆中心方向运动;当实际轮廓小于理想轮廓时,环切刀头进给伺服电机驱动第二滑块靠近电缆中心方向运动;从而保证环切刀头运动轨迹与电缆
实际外圆轮廓曲线重合。
12.本发明的技术效果:纵切装置和环切装置均添加刀头进给伺服电机和直线位移传感器。滑块与丝杠螺母机构的螺母固定在一起,丝杠与刀头进给伺服电机的输出轴通过联轴器连接在一起。当刀头进给伺服电机带动丝杠旋转时,t型螺母、滑块、刀头、刀头旋转伺服电机四者一起径向方向运动。通过直线位移传感器的探头检测电缆实际轮廓与理想轮廓在径向方向的实际距离。当实际轮廓与理想轮廓在空间位置重合时,刀头进给伺服电机停止动作;当实际轮廓大于理想轮廓时,刀头进给伺服电机驱动滑块远离半径方向运动;当实际轮廓小于理想轮廓时,刀头进给伺服电机驱动滑块靠近半径方向运动,从而保证刀头运动轨迹与电缆实际外圆轮廓曲线重合,提高电缆剥皮的精准度。
附图说明
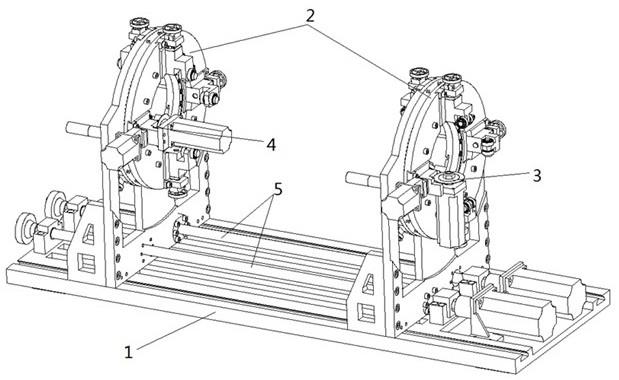
13.图1为本发明的电缆剥皮机器人总体结构图,其中,1为纵切装置,2为环切装置,3为底座支撑装置。
14.图2为电缆实际轮廓与理想轮廓横切面对比图,其中,δr1表示电缆实际轮廓曲线与理想轮廓曲线重合(δr1=0),δr2表示电缆实际轮廓曲线半径大于理想轮廓曲线半径(δr2>0),δr3表示电缆实际轮廓曲线半径小于理想轮廓曲线重合(δr3<0)。
15.图3为电缆实际轮廓与理想轮廓纵切面对比图,其中,δy1表示电缆实际轮廓曲线与理想轮廓曲线重合(δy1=0),δy2表示电缆实际轮廓曲线半径大于理想轮廓曲线半径(δy2>0),δy3表示电缆实际轮廓曲线半径小于理想轮廓曲线重合(δy3<0)。
16.图4为本发明所述电缆剥皮机器人的纵切装置示意图。
17.图5为本发明所述电缆剥皮机器人的环切装置示意图。
18.图6为电缆压紧固定机构的示意图;图7为电缆压紧固定机构的爆炸示意图。
19.图8为小丝杠螺母机构爆炸示意图。
20.图中,1
‑
底座支撑装置、2
‑
电缆压紧固定机构、3
‑
纵切装置、4
‑
环切装置、5
‑
丝杠螺母机构;31
‑
纵切刀头进给伺服电机、32
‑
第一法兰支架、33
‑
第一小轴承座、34
‑
第一螺母、35
‑
纵切刀头、36
‑
纵切刀头旋转伺服电机、37
‑
第一联轴器、38
‑
第一螺钉、39
‑
第二螺钉、310
‑
第一t型螺母、311
‑
第一滑块、312
‑
第一直线位移传感器、313
‑
第一丝杠;41
‑
环切刀头进给伺服电机、42
‑
第二法兰支架、43
‑
第二小轴承座、44
‑
第二螺母、45
‑
环切刀头、46
‑
环切刀头旋转伺服电机、47
‑
第二联轴器、48
‑
第三螺钉、49
‑
第四螺钉、410
‑
第二t型螺母、411
‑
第二滑块、412
‑
第二直线位移传感器、413
‑
第二丝杠;21
‑
圆环底板、22
‑
齿轮基板、23a,23b,23c,23d,23e,23f
‑
小丝杠螺母机构、24
‑
手柄、25
‑
小齿轮驱动电机、26
‑
大轴承座、27
‑
薄壁轴承、28
‑
大齿轮、29
‑
小齿轮、210
‑
大法兰螺母、211
‑
筋板、212
‑
倒 t 型滑块;231
‑
小轴承座、232
‑
轴承支撑滑块、233
‑
小丝杠、234
‑
小法兰螺母、235
‑
手轮、236
‑
深沟球轴承、237
‑
双深沟球轴承、238
‑
小轮轴、 232a
‑
倒t型凸台、232b
‑
通孔、232c
‑
轮轴孔。
具体实施方式
21.下面结合附图对本发明作详细描述。
22.如图1所示,一种适应不规则电缆外轮廓的电缆剥皮机器人,由底座支撑装置1、两套电缆压紧固定机构2、纵切装置3、环切装置4、两套丝杠螺母机构5组成,两套电缆压紧固定机构2滑动安装在底座支撑装置1上,两套电缆压紧固定机构2通过底座支撑装置1中的两套丝杠螺母机构5分别控制纵向移动,其中一套电缆压紧固定机构2上安装纵切装置3,另一套电缆压紧固定机构2上安装环切装置4。
23.由于电缆挤压、缠绕、运输等因素,导致因电缆外轮廓往往不是理想圆形截面。主要存在以下情况,环向实际轮廓曲线与理想轮廓曲线重合(δr1=0)、环向实际轮廓曲线大于理想轮廓曲线(δr2>0)、环向实际轮廓曲线小于理想轮廓曲线(δr3<0),如图2所示;纵向电缆实际轮廓曲线与理想轮廓曲线重合(δy1=0),纵向电缆实际轮廓曲线半径大于理想轮廓曲线半径(δy2>0),纵向电缆实际轮廓曲线半径小于理想轮廓曲线重合(δy3<0),如图3所示。
24.参照图4,纵切装置3包括纵切刀头旋转模块和纵切刀头径向进给模块,主要实现纵向方向的位置反馈控制。纵切刀头径向进给模块包括纵切刀头进给伺服电机31、第一法兰支架32、第一小轴承座33、第一滑块311、第一直线位移传感器312、第一丝杠313。第一滑块311与其中一套电缆压紧固定机构2的圆环底板21上开设的径向滑槽配合,第一小轴承座33通过第一螺钉38固定到圆环底板21上,第一法兰支架32与第一小轴承座33固定连接,纵切刀头进给伺服电机31与第一法兰支架32固定连接,纵切刀头进给伺服电机31的输出轴通过第一联轴器37连接第一丝杠313,第一丝杠313上安装有第一t型螺母310,第一t型螺母310与第一滑块311通过第二螺钉39固定连接,第一滑块311中安装有第一直线位移传感器312。纵切刀头旋转模块与第一滑块311固定连接,纵切刀头旋转模块和第一滑块311与圆环底板21构成径向滑动副。
25.纵切刀头旋转模块包括纵切刀头旋转伺服电机36、纵切刀头35以及第一螺母34,纵切刀头旋转伺服电机36与第一滑块311的阶梯止口配合并固定,纵切刀头35通过第一螺母34与纵切刀头旋转伺服电机36的输出轴固定。
26.第一直线位移传感器312安装有球形探针。为了减少检测误差,第一直线位移传感器312和纵切刀头35平面经过圆心的同一个纵向截面。
27.纵切刀头进给伺服电机31带动第一丝杠313旋转时,第一t型螺母310、第一滑块311、纵切刀头35、纵切刀头旋转伺服电机36四者一起径向方向运动。以电缆的标称外径作为基准,在笛卡尔坐标系下,通过第一直线位移传感器312的探头检测电缆实际轮廓与理想轮廓在在y方向的实际距离,当实际轮廓与理想轮廓在空间位置重合时,纵切刀头进给伺服电机31停止动作;当实际轮廓大于理想轮廓时,纵切刀头进给伺服电机31驱动第一滑块111远离电缆中心方向运动;当实际轮廓小于理想轮廓时,纵切刀头进给伺服电机31驱动第一滑块311靠近电缆中心方向运动;从而保证纵切刀头35运动轨迹与电缆实际外圆轮廓曲线重合,提高电缆剥皮的精准度。
28.环切装置4的结构与纵切装置3类似,差别在于环切刀头45的位置与纵切刀头35的位置相比旋转了90度。环切装置4包括环切刀头旋转模块和环切刀头径向进给模块,环切装置4的环切刀头旋转进给模块主要实现径向沿圆周方向的位置反馈。参照图5,环切刀头径
向进给模块包括环切刀头进给伺服电机41、第二法兰支架42、第二小轴承座43、第二滑块411、第二直线位移传感器412、第二丝杠413。第二滑块411与另一套电缆压紧固定机构2的圆环底板21上开设的径向滑槽配合,第二小轴承座43通过第三螺钉48固定到圆环底板21上,第二法兰支架42与第二小轴承座43固定连接,环切刀头进给伺服电机41与第二法兰支架42固定连接,环切刀头进给伺服电机41的输出轴通过第二联轴器47连接第二丝杠413,第二丝杠413上安装有第二t型螺母410,第二t型螺母410与第一滑块311通过第四螺钉49固定连接,第二滑块411中安装有第二直线位移传感器412。环切刀头旋转模块与第二滑块411固定连接,环切刀头旋转模块和第二滑块411与圆环底板21构成径向滑动副。
29.环切刀头旋转模块包括环切刀头旋转伺服电机46、环切刀头45以及第二螺母44,环切刀头旋转伺服电机46与第二滑块411的阶梯止口配合并固定,环切刀头45通过第二螺母44与环切刀头旋转伺服电机46的输出轴固定。
30.同理,第二直线位移传感器412安装有球形探针。为了减少检测误差,第二直线位移传感器412和环切刀头45平面经过圆心的同一个纵向截面。
31.环切刀头进给伺服电机41带动第二丝杠413旋转时,第二t型螺母410、第二滑块411、环切刀头45、环切刀头旋转伺服电机46四者一起径向方向运动。通过第二直线位移传感器412的探头检测电缆实际轮廓与理想轮廓在径向方向的实际距离,当实际轮廓与理想轮廓在空间位置重合时,环切刀头进给伺服电机41停止动作;当实际轮廓大于理想轮廓时,环切刀头进给伺服电机41驱动第二滑块411远离电缆中心方向运动;当实际轮廓小于理想轮廓时,环切刀头进给伺服电机41驱动第二滑块411靠近电缆中心方向运动;从而保证环切刀头45运动轨迹与电缆实际外圆轮廓曲线重合,提高电缆剥皮的精准度。
32.参照图6和图7,电缆压紧固定机构2包括圆环底板21、齿轮基板22、小丝杠螺母机构23a,23b,23c,23d,23e,23f、手柄 24 和小齿轮驱动电机25、大轴承座26、薄壁轴承27、大齿轮28、小齿轮29、大法兰螺母210、筋板211、倒 t 型滑块212等,在齿轮基板22的两端安装有手柄24和小齿轮驱动电机25,圆环底板21通过螺钉固定到大齿轮28上,小齿轮29与小齿轮驱动电机25相连接,小齿轮29与大齿轮28啮合构成减速机构。大齿轮28与齿轮基板22的相对旋转运动,通过薄壁轴承27实现。大齿轮28与薄壁轴承27通过过盈配合,实现薄壁轴承27的外圈旋转,大齿轮28轴向方向的限位通过螺钉、平垫和螺母实现。薄壁轴承27通过过渡配合与大轴承座26安装,实现薄壁轴承27内圈的固定。大轴承座26通过螺钉、平垫固定到齿轮基板22。筋板211通过螺钉固定到齿轮基板22上,用于防倒支撑,倒 t 型滑块212通过螺钉固定到齿轮基板22上,用于在底座支撑装置1上滑动。大法兰螺母210通过螺钉固定到齿轮基板22上, 用于推动齿轮基板22纵向移动。
33.为了更好的固定压紧电缆,齿轮基板22安装三套小丝杠螺母机构23a,23b,23c,这三套小丝杠螺母机构23a,23b,23c相邻夹角为120度,圆环底板21安装三套小丝杠螺母机构23d,23e,23f,这三套小丝杠螺母机构23d,23e,23f相邻夹角也为120度,六套小丝杠螺母机构23a,23b,23c,23d,23e,23f均用于径向压紧电缆,圆环底板21上还安装纵切装置3或环切装置4,用于对电缆绝缘层切割。
34.如图8所示,小丝杠螺母机构23a,23b,23c,23d,23e,23f包含小轴承座231、 轴承支撑滑块232、小丝杠233和小法兰螺母234。手轮235通过销钉固定到小丝杠233 上。 在小丝杠233的端部使用两个深沟球轴承236支撑,这两个深沟球轴承236通过小轴承座231 的
止口和轴用挡圈限位。轴承支撑滑块232设计有倒 t 型凸台232a、 通孔232b、 轮轴孔232c。小法兰螺母234插入轴承支撑滑块232的通孔232b中,通过螺钉固定。小轮轴238套入轴承支撑滑块232的轮轴孔232c 中,两侧安装有双深沟球轴承 237。
35.一种适应不规则电缆外轮廓的电缆剥皮方法,基于电缆剥皮机器人,电缆伸入两套电缆压紧固定机构2的中心孔中,根据切割位置需要,通过两套丝杠螺母机构5调节两套电缆压紧固定机构2的间距,即调节纵切装置3和环切装置4的距离,然后通过纵切装置3纵切电缆绝缘层,通过环切装置4环切绝缘层,切割过程中:纵切刀头进给伺服电机31带动第一丝杠313旋转时,第一t型螺母310、第一滑块311、纵切刀头35、纵切刀头旋转伺服电机36四者一起径向方向运动;以电缆的标称外径作为基准,在笛卡尔坐标系下,纵向方向采用接触式的带球形探针的第一直线位移传感器312测量在y方向的变化量;第一直线位移传感器312采集的y坐标变化数据,经plc控制系统或者pc上位机进行运动控制、数据采集、数据分析,以图形、表格方式显示测量电缆外轮廓沿纵向方向的y坐标数据点;通过第一直线位移传感器的探头检测电缆实际轮廓与理想轮廓在y方向的实际距离,当实际轮廓与理想轮廓在空间位置重合时,纵切刀头进给伺服电机31停止动作;当实际轮廓大于理想轮廓时,纵切刀头进给伺服电机31驱动第一滑块111远离电缆中心方向运动;当实际轮廓小于理想轮廓时,纵切刀头进给伺服电机31驱动第一滑块311靠近电缆中心方向运动;从而保证纵切刀头35运动轨迹与电缆实际外圆轮廓曲线重合;环切刀头进给伺服电机41带动第二丝杠413旋转时,第二t型螺母410、第二滑块411、环切刀头45、环切刀头旋转伺服电机46四者一起径向方向运动;以圆环底板21的中心轴作为回转测量基准,在圆环底板21确定r轴的零线位置,圆形光栅码盘固定到圆环底板21上,在极坐标系下,径向方向采用接触式的带球形探针的第二直线位移传感器412测量径向变化量;第二直线位移传感器412采集的角度坐标数据,经plc控制系统或者pc上位机进行运动控制、数据采集、数据分析,以图形、表格方式显示测量电缆外轮廓沿圆周方向的极坐标数据点(r δl, θ
i
);通过第二直线位移传感器412的探头检测电缆实际轮廓与理想轮廓在径向方向的实际距离,当实际轮廓与理想轮廓在空间位置重合时,环切刀头进给伺服电机41停止动作;当实际轮廓大于理想轮廓时,环切刀头进给伺服电机41驱动第二滑块411远离电缆中心方向运动;当实际轮廓小于理想轮廓时,环切刀头进给伺服电机41驱动第二滑块411靠近电缆中心方向运动;从而保证环切刀头45运动轨迹与电缆实际外圆轮廓曲线重合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。