1.本发明属于电源技术领域,具体涉及抑制模块化多电平矩阵变换器的电容电压波动抑制方法。
背景技术:
2.模块化多电平矩阵变换器(modular multilevel matrix converter,m3c)是一种较为新颖的实现交交变换的拓扑。目前已经能够实现三相间交流变频及其他交流变换。同时,其具有模块化、电平数多等优点,兼具传统矩阵变换器(matrix converter,mc)及模块化多电平变换器(modular multilevel converter,mmc)背靠背结构二者优点的同时,在低频状态下也极具优势。除此之外,在风力发电、潮汐发电等领域,m3c因其良好的动静态特性而具有极好的应用前景。如图1所示即为m3c变换器及其子模块拓扑结构:3
×
3型m3c拓扑结构共有9个桥臂,每个桥臂上均由一个桥臂电感l以及若干个全桥子模块串联而成;一个子模块是由一个全桥子模块和一个电容并联形成。全桥子模块由4个电力电子开关器件(如mosfet、igbt等)组成。
3.根据m3c工作原理可知,m3c在输入为工频交流,输出为零频、低频、趋于工频和等于工频的时候,系统是不稳定的。其不稳定的原理是不一样的。而对于m3c运行在输入输出频率相近时,其子模块电容电压存在波动较大的问题,主要通过双αβ变换控制,进而实现对对电容电压波动的抑制,其次是通过反馈系统子模块电容电压的波动来抑制。对于前者,其控制和解耦较为复杂;对于后者,其并不能从根本上解决子模块电容电压的波动,且抑制的效果相对较差,且对于以上几种特殊的工况下,抑制方法并不是一样的。对此本发明通过对桥臂功率的分析,计算出特定的注入量,通过直接控制的方法就能够实现对子模块电容电压的波动实现抑制。
技术实现要素:
4.本发明的主要目的是解决m3c运行在输入输出频率相等时,子模块电容电压波动过大的问题。本发明提出了一种模块化多电平矩阵变换器的电容电压波动抑制方法,能够有效的抑制在此工况条件下的子模块电容电压波动过大的情况,且完全不影响系统的输入输出。
5.一种模块化多电平矩阵变换器的电容电压波动抑制方法,包括以下步骤:
6.步骤1,根据系统的输入及输出的电压和电流对变换器进行建模,得到桥臂的功率,进而得到子模块电容电压波动的表达式;
7.根据3
×
3型模块化多电平矩阵变换器m3c(m3c)的拓扑结构,系统具体包括9个桥臂,每个桥臂上包括n个子模块单元以及一个桥臂电感,每个子模块单元包括一个h桥以及一个电容,
8.定义输入电压和电流为:
9.u
a
=v
1 sin(ω1t) i
a
=i
1 sin(ω1t)
[0010][0011][0012]
输出电压和电流为:
[0013][0014][0015][0016]
其中,ω1,ω2分别为输入输出三相的角频率,u
x
为输入电压,i
x
为输入电流的幅值,u
y
为输出电压,i
y
为输出电流,v1为输入电压的幅值,v2位输出电压的幅值,i1、i2分别为输入输出电流的幅值。其中x=a,b,c为输入的三相,y=u,v,w为输出的三相,为初始条件下输入与输出之间的相位角;
[0017]
根据基尔霍夫电流及电压定律:
[0018]
i
x
=i
xu
i
xv
i
xw
[0019]
i
y
=i
ay
i
by
i
cy
[0020]
u
xu
=u
x
‑
u
u
‑
u
no
‑
u
lxu
[0021]
u
xv
=u
x
‑
u
v
‑
u
no
‑
u
lxv
[0022]
u
xw
=u
x
‑
u
w
‑
u
no
‑
u
lxw
[0023]
当系统正常工作的情况下,根据系统的拓扑结构的特点,三相是处于对称的状态,则有:i
xy
为xy相的桥臂电流。u
xy
为xy相的桥臂电压,u
no
为输出三相到输入三相的中性点之间的电位差;
[0024]
进而得到au相桥臂的功率p
au
:
[0025][0026]
取子模块电容电压的波动的交流分量为q为常数,和系统桥臂的子模块个
数、电容以及全体子模块的平均电压相关,其中为:
[0027][0028]
步骤2,根据上述得到的子模块电容电压波动纹波的公式,分析引起桥臂电容电压的主导因素;
[0029]
从桥臂功率的波动以及子模块电容电压的波动表达式上看到,当ω1趋向于ω2时,由于成分中的和子模块的电容电压的波动的频率会很小,且幅值很大,同时和输入输出的幅值有比较大的影响,当v1i2与v2i1相差越大,其波动幅值越大;
[0030]
当输入和输出的频率相近时,影响其波动包括的因素是ω1‑
ω2的功率分量,通过注入来抵消ω1‑
ω2的功率分量;
[0031]
根据三角函数之间的转换公式:
[0032]
2sin(ω1t)*sin(ω2t)=cos(ω1‑
ω2)t
‑
cos(ω1 ω2)t
[0033]
考虑到输入和输出的角频率的关系,提出双正弦波注入的角频率取为ω3=ω1 ω1‑
ω2,ω4=ω2‑
ω1 ω2,通过注入这两种频率,产生ω1‑
ω2的波动,但在注入双正弦波桥臂电流之后,产生新的频率的桥臂功率波动;
[0034]
步骤3,针对输入输出频率相近的情况下,提出双正弦波桥臂注入法的参数设计;注入后的桥臂功率表达式为:
[0035][0036]
其中,θ1和θ2分别为注入桥臂电流的相角,a,b为注入电流的幅值;通过选择合适的注入电流的幅值a和b,产生ω1‑
ω2的波动分量,其次满足在注入后,桥臂功率中产生的新的波动分量相互抵消,最后通过拓扑的特殊性,确定所有桥臂的注入分量的相角,以实现在注入新的桥臂电流之后,不影响系统整体的输入输出,注入的环流仅在系统内部起到相互抵消的作用,即注入之前的低频项和通过
av1cos((ω1‑
ω3)t
‑
θ1)和进行抵消,对于注入新产生的低频振荡功率bv1cos((ω1‑
ω4)t
‑
θ2)和自行抵消,剩余便全是高频分量,而高频分量在子模块电容电压上的反应很小,并不会产生低频、高幅值的波动,从而实现对子模块电容电压波动的抑制。
[0037]
本发明实现的有益效果如下:完全利用系统的结构特性,在不影响输入输出的情况下,不改变桥臂电压,仅通过注入一定的桥臂电流,就能够实现对输入输出相近时的子模块电容电压波动过大的问题进行解决,没有附加多余的控制器,没有增加系统的控制复杂性。
附图说明
[0038]
图1为3
×
3型模块化多电平矩阵变换器(m3c)拓扑结构图;
[0039]
图2为双正弦波桥臂电流注入法示意图;
[0040]
图3为正常的桥臂功率p
au
波形图;
[0041]
图4为双正弦波桥臂电流注入后的桥臂功率p
au
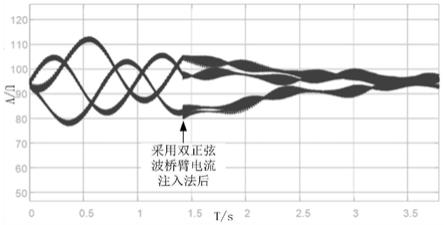
波形图;
[0042]
图5为桥臂电流注入控制框图;
[0043]
图6为子模块电容电压波形图;
[0044]
图7为不使用本方法的输出电压的fft分析;
[0045]
图8为使用双正弦波桥臂电流注入法后输出电压的fft分析;
[0046]
图9为注入前后的桥臂电流波形的参考值与实际值。
具体实施方式
[0047]
下面将结合本发明的附图,对本发明所述的具体方法进行更加具体地叙述。
[0048]
本发明实施例的模块化多电平矩阵变换器的电容电压波动抑制方法,包括以下步骤:
[0049]
步骤1,根据系统的输入及输出的电压和电流对变换器进行建模,得到桥臂的功率,进而得到子模块电容电压波动的表达式;
[0050]
如图1所示,根据3
×
3型模块化多电平矩阵变换器m3c的拓扑结构,系统具体包括9个桥臂,每个桥臂上包括n个子模块单元以及一个桥臂电感l,每个子模块单元包括一个h桥以及一个电容,其中图1右上方为h桥子模块,具体包括4个功率开关管,呈h桥结构,及电容器c。
[0051]
取输入电压、输入电流为:
[0052]
u
a
=v1sin(ω1t) i
a
=i1sin(ω1t)
[0053][0054][0055]
输出电压和电流为:
[0056][0057][0058][0059]
其中,v1,v2分别为输入输出电压的幅值;i1,i2分别为输入输出电流的幅值。ω1,ω2分别为输入输出三相的角频率,u
x
为输入电压,i
x
为输入电流,u
y
为输出电压,i
y
为输出电流,其中x=a,b,c为输入的三相,y=u,v,w为输出的三相。为输入与输出之间的相位角。
[0060]
根据电路特性分析桥臂电流,电压,桥臂功率以及子模块电容电压的纹波分析。
[0061]
由kvl与kcl可得到如下的关系:
[0062]
i
a
=i
au
i
av
i
aw
[0063]
i
b
=i
bu
i
bv
i
bw
[0064]
i
c
=i
cu
i
cv
i
cw
[0065]
i
u
=i
au
i
bu
i
cu
[0066]
i
v
=i
av
i
bv
i
cv
[0067]
i
w
=i
aw
i
bw
i
cw
[0068]
i
x
=i
xu
i
xv
i
xw
[0069]
i
y
=i
ay
i
by
i
cy
[0070]
u
xu
=u
x
‑
u
u
‑
u
no
‑
u
lxu
[0071]
u
xv
=u
x
‑
u
v
‑
u
no
‑
u
lxv
[0072]
u
xw
=u
x
‑
u
w
‑
u
no
‑
u
lxw
[0073]
其中i
xy
为xy相的桥臂电流,u
lxu
为xu相的桥臂电感的电压,u
no
为输出三相到输入三相的中性点之间的电位差。忽略桥臂电感上的电压。当系统正常工作的情况下,根据系统的拓扑结构的特点,三相是处于对称的状态,则有:
[0074][0075]
可以得到桥臂的功率表达式为:
[0076][0077]
同样,可得子模块电容电压的波动的交流分量为q为常数,和系统桥臂的子
模块个数、电容以及全体子模块的平均电压相关,其中为:
[0078][0079]
步骤2,根据上述得到的子模块电容电压波动纹波的公式,分析引起桥臂电容电压的主导因素。
[0080]
从上述公式中可得到,当ω1趋向于ω2时,由于成分中的和子模块的电容电压的波动的频率会非常慢,且幅值很大。同时和输入输出的幅值有比较大的影响,当v1i2与v2i1相差越大,其波动幅值越大。
[0081]
对于该系统,忽略系统的损耗,同时输入输出的有功相等。当系统的输入与输出的频率相差很小的时候,就会产生很大的频率为ω1‑
ω2的交流分量。故本发明提出了双正弦桥臂电流注入法。
[0082]
本方法的出发点是往桥臂电流中注入一定的环流分量,进而在桥臂功率层面,将ω1‑
ω2的功率分量进行抑制消除,进而子模块电容电压的波动的表达式中就不会出现该波动分量。系统在输入输出频率相近的时候,子模块电容电压会产生较大的,低频的波动,但是并不会影响系统的整体稳定性。
[0083]
从桥臂的功率表达式中可得,ω1‑
ω2分量产生的主要原因是输入输出的电压电流相乘。同时,功率波动中的ω1‑
ω2分量是存在一定相位角的,该波动的横向纵向也是能够抵消的。所以,在往桥臂电流中注入时,其理想前提为其注入分量不影响系统的整体输入输出。首先要保证其中一相的注入量不管在横向还是纵向上,都需要和另外的两相能够抵消,否则就会影响输入输出。
[0084]
步骤3,针对输入输出频率相近的情况下,提出双正弦波桥臂注入法的主要参数设计原理与思路。
[0085]
以本文中输入输出参数为例,现取ω1>ω2,ω2趋向于ω1,根据桥臂功率的公式,不难看出桥臂中含有角频率为ω1‑
ω2的波动。本发明实施例提出注入桥臂的电流的角频率为ω3=ω1 ω1‑
ω2,ω4=ω2‑
ω1 ω2,以实现将角频率为ω1‑
ω2的功率分量全部抵消。注入的公式可表示为:
[0086][0087]
其中f(ω3t)和f(ω4t)为注入电流的表达式。
[0088]
根据三角函数之间的转换:
[0089]
2sin(ω1t)*sin(ω2t)=cos(ω1‑
ω2)t
‑
cos(ω1 ω2)t
[0090]
可以看出,在注入ω3,ω4的桥臂分量后,会产生新的频率的电容电压的波动,注入后,桥臂功率中波动的角频率有2ω1,2ω2,ω1 ω3,ω1‑
ω3,ω1 ω4,ω1‑
ω4,ω2 ω3,ω2‑
ω3,ω2 ω4,ω2‑
ω4,ω1 ω2,ω1‑
ω2等功率分量。其中,以上频率的分量中有ω1‑
ω3,ω1‑
ω4,ω2‑
ω3,ω2‑
ω4,ω1‑
ω2这几种为低频分量,剩余的为高频分量,根据子模块电容电压的公式,不难得出桥臂功率中的高频分量在子模块上的波动是很小的,可以忽略。上述低频分量中含有ω3和ω4的为注入产生的。将ω3和ω4的表达式带入以上的功率分量中,原来位置的频率分量变为ω1‑
ω2,2(ω1‑
ω2),2(ω1‑
ω2),ω1‑
ω2,ω1‑
ω2。即,注入新的桥臂电流后,低频分量变成了三个ω1‑
ω2的分量和两个2(ω1‑
ω2)的的分量,低频分量是不利于对子模块电容电压波动进行抑制的。所以,在注入的时候,在注入的幅值a,b应该满足将三个ω1‑
ω2的分量抵消,同时将两个2(ω1‑
ω2)的的分量抵消。可在桥臂功率的联立方程解得a、b、θ1、和θ2的值。
[0091]
往桥臂电流注入电流之后的桥臂功率的公式:
[0092][0093]
为了满足桥臂中注入的分量能够在变换器中抵消而不影响输入输出,可以根据桥臂功率在ω1‑
ω2分量上的相角,通过拓扑的对称性,推导出注入分量的相角。通过求解可以发现,注入的两个正弦波在横向和纵向上是分别相差120
°
的,所以注入分量在变换器中能够相互抵消而没有影响到输入和输出的电流和电压。在本发明的输入输出参数中,其在电路中的表现形式如图2所示。如果输入输出存在一定相位差时,其注入分量中含有一定的相角,但其大致原理和上述描述类似。
[0094]
注入后的桥臂功率表达式为:
[0095][0096]
其中,注入之前的低频项和通过av1cos((ω1‑
ω3)t
‑
θ1)和进行抵消,对于注入新产生的低频振荡功率bv1cos((ω1‑
ω4)t
‑
θ2)和自行抵消。剩余便全是高频分量了。
[0097]
在注入之前和注入之后的桥臂功率波形图如图3和图4所示,可以明显看到,在注入之前,桥臂功率中存在低频的振荡,但是在往桥臂这个注入环流之后,桥臂的功率中,不存在低频这样了,仅剩高频振荡,经积分后,在子模块电容上的波动便很小。从公式中可以
体现出,若是要抵消当前工况下低频角频率的桥臂功率,本发明中提出的两个注入频率的桥臂电流注入才能实现完全抵消。
[0098]
对此本文搭建了m3c系统的仿真,对本发明提出的方法进行仿真验证。该方法仅在桥臂电流的控制上实现即可,通过对桥臂电流注入一定的环流,桥臂电流的参考值发生了一定的变化,通过控制将参考的桥臂进行跟随之后,便实现了环流注入,如图5所示,经注入后,产生桥臂电流的控制信号,最终产生占空比控制分量。
[0099]
从图6中可以看出,在注入之前,子模块电容电压的波动是低频且幅值较大,虽然理论上不影响系统的稳定性,但是子模块电容电压的波动很大的情况下,对硬件方面以及成本会产生一定影响。且在输入输出频率相差很小的情况下,其波动的幅值是无限大的。仿真中的波动的峰峰值大概在20v左右,当采用本发明提出的注入方法以后,子模块电容电压的波动有了明显的下降,且趋向于其参考值。同时,其波动剩余的分量均为高频分量,环流的注入对子模块电容电压的稳定性和系统的输入输出有一定的正向作用,有助于系统后续的运行和硬件的保护。从图7和图8中可以看出,注入前后,对系统的输出基本没有影响,且输出特性良好。从图9可以看到注入前后桥臂电流的波形图及电流的控制效果,上图为桥臂电流的参考值,下图为桥臂电流的实际值。所以,本发明提出的双正弦波桥臂电流注入法对于输入输出频率极为相近的情况下是一种切实有效且实用的方法。
[0100]
上述已在附图的基础上对本发明的整体内容进行了较为详尽的描述,对并非对本技术的保护范围的限制,所属专业的相关人员应该明白,在不需付出创造性劳动即可在本技术的计算方案的基础上做出的任何修改及变形仍在本发明法保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。